最近想使用OpenCV 和ROS实现点云的拼接,实现三维重建,那么在学习了kinect的基本的使用方法以后我们知道,直接使用ROS 的包即可得到点云,深度图,rgb图等信息,
roslaunch openni_launch openni.launch(深度图彩色图,还有点云都获取了)
rosrun openni_camera openni_node (深度图与彩色图)
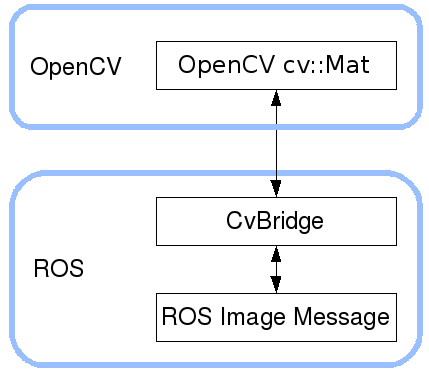
那么实现点云的拼接就需要使用cv_bridge把ROS 的数据格式转为Opencv可以使用的数据格式。即是一个提供ROS和OpenCV库提供之间的接口的开发包。
(1) 将ROS图像信息转换为OpenCV图像
cvbridge定义了一个opencv图像cvimage的类型、包含了编码和ROS的信息头。cvimage包含准确的信息sensor_msgs /image,因此我们可以将两种数据类型进行转换。cvimage类格式:
namespace cv_bridge { class CvImage { public: std_msgs::Header header; std::string encoding; cv::Mat image; }; typedef boost::shared_ptr<CvImage> CvImagePtr; typedef boost::shared_ptr<CvImage const> CvImageConstPtr; }
当要把一个ROS 的sensor_msgs /image 信息转化为一cvimage,cvbridge有两个不同的使用情况:
(1)如果要修改某一位的数据。我们必须复制ROS信息数据的作为副本。
(2)不修改数据。可以安全地共享的ROS信息,而不是复制的数据。
cvbridge转换为CvImage提供了以下功能:
// Case 1: Always copy, returning a mutable CvImage CvImagePtr toCvCopy(const sensor_msgs::ImageConstPtr& source, const std::string& encoding = std::string()); CvImagePtr toCvCopy(const sensor_msgs::Image& source, const std::string& encoding = std::string()); // Case 2: Share if possible, returning a const CvImage CvImageConstPtr toCvShare(const sensor_msgs::ImageConstPtr& source, const std::string& encoding = std::string()); CvImageConstPtr toCvShare(const sensor_msgs::Image& source, const boost::shared_ptr<void const>& tracked_object, const std::string& encoding = std::string());
输入是图像消息指针,以及可选的编码参数。编码是指cvimage的类型。
tocvcopy复制从ROS消息的图像数据,可以自由修改返回的cvimage。即使当源和目的编码匹配。
tocvshare将避免复制,在ROS的消息数据把指针返回的 cv::mat,,如果源和目的编码匹配。只要你保持一份返回的cvimage,ROS的消息数据将不会释放。如果编码不匹配时,它将分配一个新的缓冲区,执行转换。将不得修改返回的cvimage,因为它可能与ROS的图像信息共享数据,这反过来又可能与其他回调函数共享。注:对tocvshare二次过载更方便,转换当一个指针指向其他信息类型(如stereo_msgs / disparityimage)包含一个sensor_msgs /image。
如果没有编码(或更确切地说,空字符串),则目标图像编码将与图像消息编码相同。在这种情况下tocvshare保证不复制图像数据。图像编码可以是以下任何一个opencv图像编码:
- 8UC[1-4]
- 8SC[1-4]
- 16UC[1-4]
- 16SC[1-4]
- 32SC[1-4]
- 32FC[1-4]
- 64FC[1-4]
介绍集中cvbridge 中常见的数据编码的形式,cv_bridge可以有选择的对颜色和深度信息进行转化。为了使用指定的特征编码,就有下面集中的编码形式:
mono8: CV_8UC1, 灰度图像
mono16: CV_16UC1,16位灰度图像
bgr8: CV_8UC3,带有颜色信息并且颜色的顺序是BGR顺序
rgb8: CV_8UC3,带有颜色信息并且颜色的顺序是RGB顺序
bgra8: CV_8UC4, BGR的彩色图像,并且带alpha通道
rgba8: CV_8UC4,CV,RGB彩色图像,并且带alpha通道
注:这其中mono8和bgr8两种图像编码格式是大多数OpenCV的编码格式。
Finally, CvBridge will recognize Bayer pattern encodings as having OpenCV type 8UC1 (8-bit unsigned, one channel). It will not perform conversions to or from Bayer pattern; in a typical ROS system, this is done instead by image_proc. CvBridge recognizes the following Bayer encodings:
-
bayer_rggb8
-
bayer_bggr8
-
bayer_gbrg8
-
bayer_grbg8
1.把Opencv图像转换为ROS图像格式
To convert a CvImage into a ROS image message, use one the toImageMsg() member function:
class CvImage { sensor_msgs::ImagePtr toImageMsg() const; // Overload mainly intended for aggregate messages that contain // a sensor_msgs::Image as a member. void toImageMsg(sensor_msgs::Image& ros_image) const; };
举个例子
首先要在创建的包CMakeLists.txt里添加依赖包。分别如下:
sensor_msgs
cv_bridge
roscpp
std_msgs
image_transport
在src文件下建立一个cv_ros_beginner.cpp文件文件内容如下
#include <ros/ros.h> //ros 的头文件 #include <image_transport/image_transport.h> //image_transport #include <cv_bridge/cv_bridge.h> //cv_bridge #include <sensor_msgs/image_encodings.h> //图像编码格式 #include <opencv2/imgproc/imgproc.hpp> //图像处理 #include <opencv2/highgui/highgui.hpp> //opencv GUI static const std::string OPENCV_WINDOW = "Image window"; //申明一个GUI 的显示的字符串 class ImageConverter //申明一个图像转换的类 { ros::NodeHandle nh_; //实例化一个节点 image_transport::ImageTransport it_; image_transport::Subscriber image_sub_; //订阅节点 image_transport::Publisher image_pub_; //发布节点 public: ImageConverter() : it_(nh_) { // Subscrive to input video feed and publish output video feed image_sub_ = it_.subscribe("/rgb/image_raw", 1, &ImageConverter::imageCb, this); image_pub_ = it_.advertise("/image_converter/output_video", 1); cv::namedWindow(OPENCV_WINDOW); } ~ImageConverter() { cv::destroyWindow(OPENCV_WINDOW); } void imageCb(const sensor_msgs::ImageConstPtr& msg) //回调函数 { cv_bridge::CvImagePtr cv_ptr; //申明一个CvImagePtr try { cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8); } catch (cv_bridge::Exception& e) { ROS_ERROR("cv_bridge exception: %s", e.what()); return; } //转化为opencv的格式之后就可以对图像进行操作了 // Draw an example circle on the video stream if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60) cv::circle(cv_ptr->image, cv::Point(50, 50), 10, CV_RGB(255,0,0)); //画圆 // Update GUI Window cv::imshow(OPENCV_WINDOW, cv_ptr->image); cv::waitKey(3); // Output modified video stream image_pub_.publish(cv_ptr->toImageMsg()); } }; int main(int argc, char** argv) { ros::init(argc, argv, "image_converter"); ImageConverter ic; ros::spin(); return 0; }
然后在CMakeLists.txt添加,
add_executable(cv_ros_beginner src/cv_ros_beginner.cpp)
target_link_libraries(cv_ros_beginner
${catkin_LIBRARIES}
)
返回catin_ws 下catkin_make即可生成可执行文件
那么我们在查看结果的时候就是要把
image_sub_ = it_.subscribe("/rgb/image_raw", 1, &ImageConverter::imageCb, this);
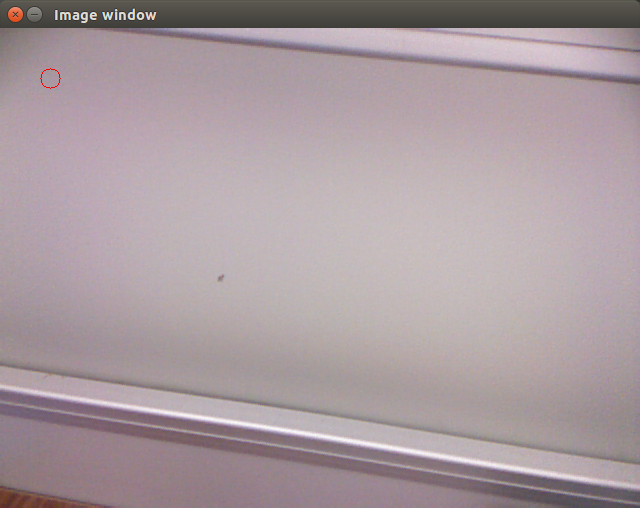
把订阅的节点换成之前我们需要订阅的节点即可实现 在订阅的图像上画一个小圆圈,并且可视化出来。
(小技巧记录:如果你的工作空间下包很多,每次都使用catkin_make的话效率十分低下,因为这种编译方法会编译工作空间下的所有的包,特别是我们在调试程序是会经常修改CMakeLists.txt文件里的内容,这样每次都会要编译整个工作空间,那么所以我们可以使用ROS的catkin_Make的功能编译一个或者多个包,具体的命令是:catkin_make -DCATKIN_WHITELIST_PACKAGES=" 你的包名"),例如:catkin_make -DCATKIN_WHITELIST_PACKAGES="ros_slam"
如果需要编译两个或者多个只需要中间加分号即可catkin_make -DCATKIN_WHITELIST_PACKAGES="ros_slam;cv_bridge",
只是搬运以下官网的程序,当然你可以实现更多的处理
那么有关于ROS以及PCL的使用的兴趣者扫描二维码关注一起与我交流分享
