Altera SoC 官方搭建指南:
https://rocketboards.org/foswiki/Documentation/EmbeddedLinuxBeginnerSGuide
官方文档中除了讲解搭建方法之外,还有很多原理性的介绍,感兴趣的朋友可以自己阅读。
准备工作:
1. 安装Altera官方提供的IDE (Quartus 和 SoC EDS), 不需要安装DS-5. 文档中的工作是基于v15.0版本
2. 一块FPGA SoC开发板。官方Guide中的硬件平台是友晶系列的DE0-Nano-SoC,但对大多Altera板子都适用
3. 一台Linux主机
4. 一张SD卡
5. 网络可以访问github
搭建步骤:
1. 生成Preloader
2.配置和编译Bootloader (U-Boot)
3. 生成和编译Device Tree
4. 测试系统(一)
5. 配置和编译Linux Kernel
6. 生成Root Filesystem
7. 测试系统(二)
搭建方法:
1. 生成Preloader
- 下载并解压GHRD,并解压至某目录: atlas_linux_ghrd.tar.gz
tar -xvzf atlas_linux_ghrd.tar.gz
- 运行EDS配置环境变量的脚本
<path-to-soceds-tools>/embedded/embedded_command_shell.sh
- 运行BSP Editor工具:
cd atlas_linux_ghrd
bsp-editor &
将弹出如下窗口:
- 配置BSP Editor:
- File→New HPS BSP
- 在弹出的窗口中,点击"Preloader settings directory"右侧的"..."按钮,选择“atlas_linux_ghrd/hps_isw_handoff/soc_system_hps_0”,然后点击Open。完成后的界面如下图,点击确定:
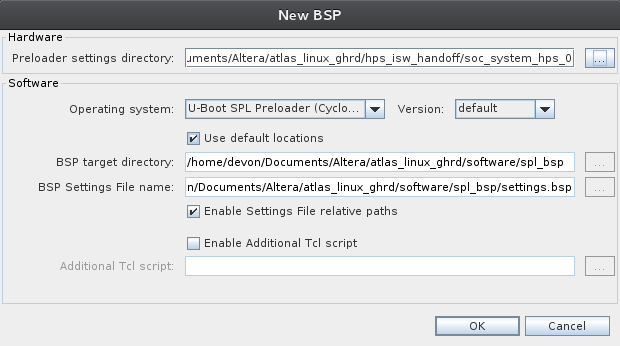
-
- 在生成的窗口中,选中"FAT_SUPPORT",其他的使用默认,结果如下图:
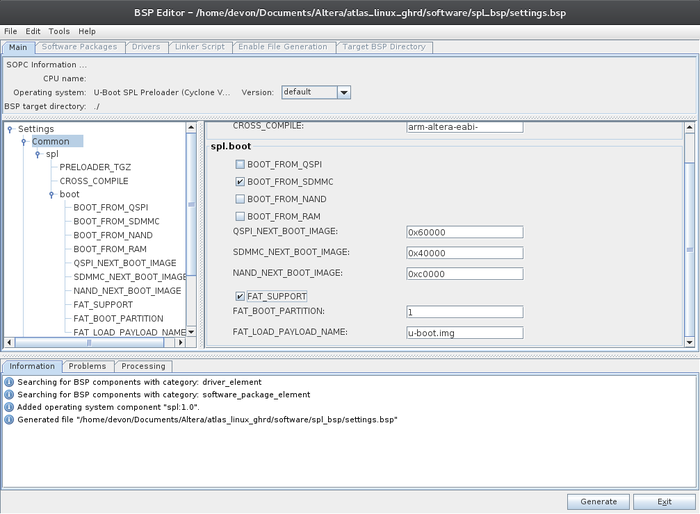
-
- 点击Generate,正常结束后点击Exit退出。
- 编译Preloader.
cd software/spl_bsp ; ls make
编译结束后将生成如下文件:
-
- 新目录 - “uboot-socfpga”
- 新文件 - “preloader-mkpimage.bin”
2.配置和编译Bootloader (U-Boot)
- 获取U-Boot编译工具: Linaro GCC toolchain for the ARMv7 instruction set,并配置其相关的环境变量
cd ..
wget https://rocketboards.org/foswiki/pub/Documentation/EmbeddedLinuxBeginnerSGuide/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.xz
tar -xvf gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.xz
export CROSS_COMPILE=$PWD/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux/bin/arm-linux-gnueabihf-
- 获取U-Boot源代码,查看并切换至相应的tag:
git clone https://github.com/altera-opensource/u-boot-socfpga.git
cd u-boot-socfpga
git tag -l rel*
git tag -l ACDS*
git checkout rel_socfpga_v2013.01.01_15.09.01_pr
- Clean U-Boot目录
make mrproper
- 编译U-Boot
make socfpga_cyclone5_config
make
- 创建boot脚本。在software目录下,新建boot.script文件,并写入如下内容:
echo -- Programming FPGA --
fatload mmc 0:1 $fpgadata soc_system.rbf;
fpga load 0 $fpgadata $filesize;
run bridge_enable_handoff;
echo -- Setting Env Variables --
setenv fdtimage soc_system.dtb;
setenv mmcroot /dev/mmcblk0p2;
setenv mmcload 'mmc rescan;${mmcloadcmd} mmc 0:${mmcloadpart} ${loadaddr} ${bootimage};${mmcloadcmd} mmc 0:${mmcloadpart} ${fdtaddr} ${fdtimage};';
setenv mmcboot 'setenv bootargs console=ttyS0,115200 root=${mmcroot} rw rootwait; bootz ${loadaddr} - ${fdtaddr}';
run mmcload;
run mmcboot;
- 编译boot脚本
mkimage -A arm -O linux -T script -C none -a 0 -e 0 -n "Boot Script Name" -d boot.script u-boot.scr
编译结束后,将生成"u-boot.scr"文件
3. 生成和编译Device Tree
- 生成Device Tree所需的board xml文件已经存在了。在"atlas_linux_ghrd"目录下,运行如下命令:
sopc2dts --input soc_system.sopcinfo
--output soc_system.dts
--type dts
--board soc_system_board_info.xml
--board hps_common_board_info.xml
--bridge-removal all
--clocks
- 编译Device Tree源代码;
dtc -I dts -O dtb -o soc_system.dtb soc_system.dts
编译结束后,将生成二进制文件:"soc_system.dtb"。
4. 测试系统(一)
Preloader和U-Boot已经生成。我们首先,以测试preloader和bootloader编译和烧写成功。
- 制作SD Card image, 生成空值组成的sdcard.img
sudo dd if=/dev/zero of=sdcard.img bs=512M count=1
- 虚拟回环设备(loop device),并获取回环设备名。红色的X表示不同的环境下可能会有不同,在我的环境下,X=0,即我得到的结果是"/dev/loop0"。
sudo losetup –-show –f sdcard.img
/dev/loopX
- 使用fdisk命令对该回环设备关联的sdcard.img进行分区
sudo fdisk /dev/loopX
-- fdisk welcome message –
Command (m for help):
首先确认,当前sd卡上没有分区:

创建分区3,用来存储preloader image,相应的配置信息如下:
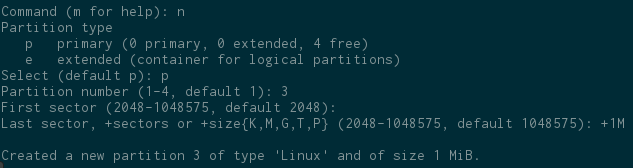
转换分区类型为'a2'

创建分区2,用来存放Linux root文件系统,相应的配置信息如下,且不需要进行分区类型转换:
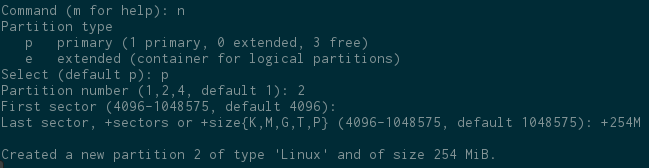
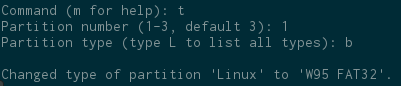
创建分区1,用来存放启动文件:相应的配置信息如下:

转换分区类型为FAT:
最终的分区信息如下图:
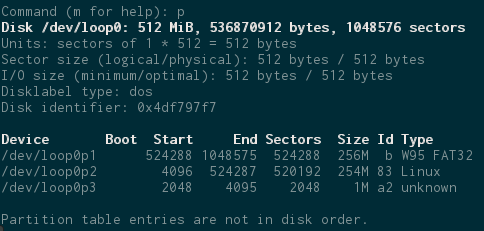
确认无误后,使用"w"命令退出,忽略下图中的错误信息。

- Kernel对上述改动尚未生效,正如上图中最后一样的提示。Reboot,或者使用"partprobe"命令,使上述改动生效。
sudo partprobe /dev/loopX
- 生成文件系统:
preloader写入分区3:
sudo dd if=software/spl_bsp/preloader-mkpimage.bin of=/dev/loopXp3 bs=64k seek=0
格式化分区1,成为FAT文件系统:
sudo mkfs –t vfat /dev/loopXp1
格式化分区2,成为ext4文件系统:
sudo mkfs.ext4 /dev/loopXp2
挂载分区1(FAT文件系统),并将拷入之前生成的"u-boot.img", "u-boot.scr"和FPGA的烧写文件"soc_system.rbf".
mkdir temp_mount
sudo mount /dev/loopXp1 ./temp_mount
sudo cp software/u-boot-socfpga/u-boot.img software/u-boot.scr soc_system.dtb soc_system.rbf temp_mount
sync
sudo umount temp_mount
- 烧写SD卡
sudo dd if=sdcard.img of=/dev/XXX bs=2048 sync
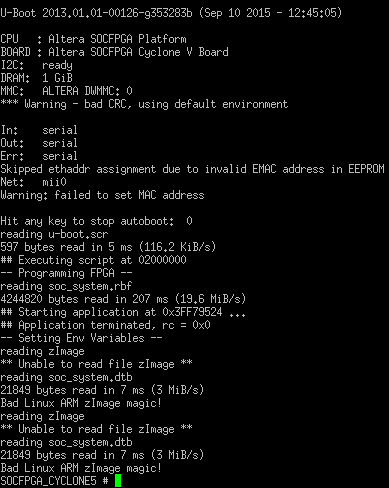
- 将SD卡插入FPGA,开机,通过串口调试工具如minicom进行调试,结果是SoC的preloader和bootloader正常启动,但因为我们还没有制作linux kernel和root filesystem, 系统提示如下错误:
5. 配置和编译Linux Kernel
- 获取Linux Kernel源代码,并切换到相应的release:
cd software
git clone https://github.com/altera-opensource/linux-socfpga.git
cd linux-socfpga
git tag –l rel*
git checkout rel_socfpga-4.1_15.09.01_pr
- 配置Linux Kernel,运行环境变量配置脚本,确保新打开的shell的环境变量配置正确:
export CROSS_COMPILE=$PWD/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux/bin/arm-linux-gnueabihf- <path-to-soceds-tools>/embedded/embedded_command_shell.sh make ARCH=arm socfpga_defconfig
- 安装图形化的kernel配置工具:
sudo apt-get install libncurses5-dev
make ARCH=arm menuconfig
- 在打开的图形界面里,需要改动2个地方。1. 主菜单进入“General Setup”,取消 “Automatically append version information to the version string” 2. 主菜单进入“Enable the block layer”,选中 “Support for large (2TB+) block devices and files”。然后save到默认的.config文件。
- 编译Linux Kernel (zImage):
make ARCH=arm LOCALVERSION= zImage
注意,"LOCALVERSION=" 后面是空格
6. 生成Root Filesystem
- 运行环境变量配置脚本,确保新打开的shell的环境变量配置正确:
export CROSS_COMPILE=$PWD/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux/bin/arm-linux-gnueabihf- <path-to-soceds-tools>/embedded/embedded_command_shell.sh
- 获取buildroot代码 (Guide中给的地址已经打不开了,自己搜索了buildroot在github上的代码)
cd software
git clone https://github.com/buildroot/buildroot
- 切换到兼容Linaro 2014.09 toolchain的版本:
cd buildroot
git checkout 2015.08.x
cd ..
- 打开配置窗口:
make -C buildroot ARCH=ARM BR2_TOOLCHAIN_EXTERNAL_PATH=$(pwd)/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux nconfig
- 配置Target Options:
- 在"Target Architecture"选项中,选择"ARM (little endian)"
- 在"Target Architecture variant"选项中,选中 "cortex-A9"
- 在"Target ABI"选项中, 选中"EABIhf"
- Enable “NEON SIMD extension support”
- 在“Floating point strategy”选项中, 选中"NEON"
- “Target Binary Format” and “ARM Instruction set” 选项保持默认。
- 配置Toolchain:
- 在“Toolchain type”选项中, 选中 “External toolchain”
- 确保 “Toolchain” 选项中,选中 “Linaro ARM 2014.09”.
- 在“Toolchain origin”选项中, 选中 “Pre-installed toolchain”
- 忽略"toolchain path"
- Enable “copy gdb server to the Target”
- 其他选项保持默认
- 配置System configuration:
- 配置hostname
- 配置root password
- 配置Kernel:
- 去掉“Linux Kernel” 选项的选中状态
- 配置Target packages
- 在 “Debugging, profiling and benchmark”选项中, 拖动滚动条到底部并选中 “valgrind”
- 配置结束,F6保存并退出。
- 配置Busy Box
make –C buildroot busybox-menuconfig
在打开的配置窗口中,不做改变保存即可。
- 编译Root Filesystem:
make -C buildroot BR2_TOOLCHAIN_EXTERNAL_PATH=$(pwd)/gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux all
7. 测试系统2
将编译好的Linux Kernel 拷入SD,并解压Root Filesystem。之后开机登陆root。
sudo cp linux-socfpga/arch/arm/boot/zImage <mount point that lsblk tells you, remember the FAT partition is the 256M one>
sudo tar –xvf buildroot/output/images/rootfs.tar –C <mount point of your ext4 partition, it’s the 254M one> sync
备份:
1. 一切工作开始前,调整SoC的MSEL开关,至Fast Passive Parallel x16模式,
2. GHRD代表 Golden Hardware Reference Design,它是包含了很多基本功能模块的硬件设计,我们可以用它作为设计参考。
3. 在生成preloader时,我碰到一个找不到二进制文件的错误,但实际上需要的二进制文件已经存在了。问题的原因是编译出的二进制文件是32位的文件,而我的主机用的是64位的Linux。安装32位兼容库即可解决:
sudo apt-get install lib32ncurses5
4. 在生成bootloader时,缺少库文件libz.so.1和工具包,安装之:
sudo apt-get install lib32z1
sudo apt-get install u-boot-tools