STM32外部脉冲ETR引脚:TIM1-->PA12;TIMER2-->PA0;TIMER3-->PD2;TIMER4-->PE0…
1.TIM2 PA0计数 配置步骤
①开启TIM2时钟,配置PA0输入
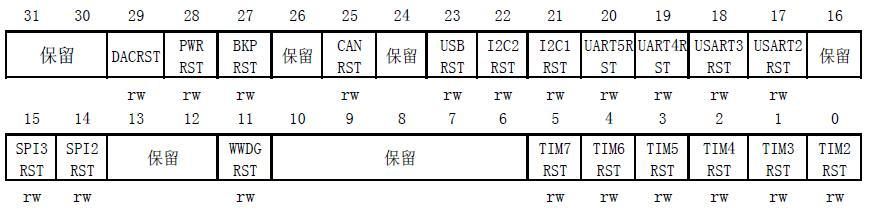
APB1外设复位寄存器 (RCC_APB1RSTR)
APB2外设时钟使能寄存器(RCC_APB2ENR)
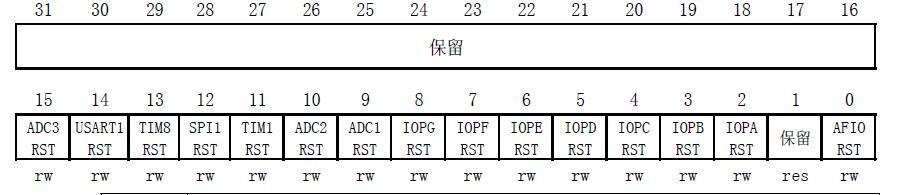
置1开启。清0关闭。
Eg:RCC->APB1ENR|=1<<0; //使能TIM2时钟
RCC->APB2ENR|=1<<2; //使能PORTA时钟
配置I/O口: 参见stm32寄存器版学习笔记01 GPIO口的配置。
Eg:GPIOA->CRL&=0XFFFFFFF0; //PA0 清除之前设置
GPIOA->CRL|=0X00000008; //PA0 输入
GPIOA->ODR|=0<<0; //PA0 下拉
②设置TIM2的ARR和PSC
自动重装载寄存器(TIMx_ARR)

预分频器(TIMx_PSC)

③设置TIM2的CCMR1
TIM2_CCMR1寄存器控制着输入捕获1和2的模式,包括映射关系、滤波和分频等。这里需要设置通道1为输入模式,且IC1映射到TI1(通道1)上,并且不使用滤波(提高响应速度)器。
捕获/比较模式寄存器1(TIMx_CCMR1)

输入捕获模式:
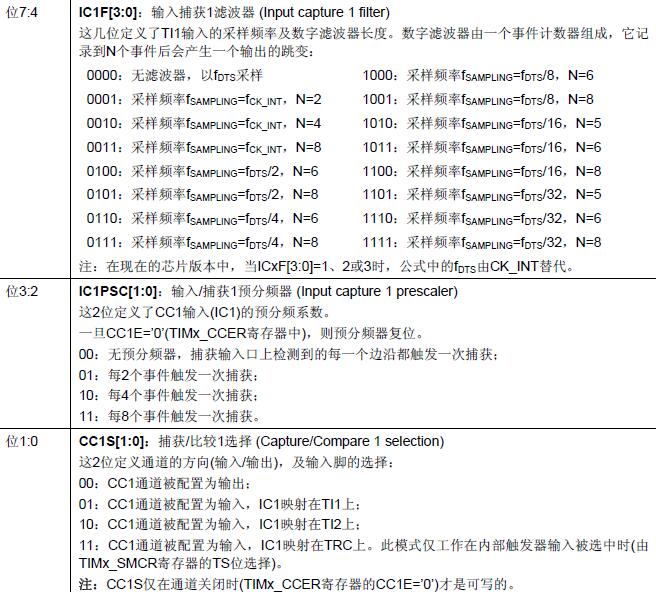
Eg:TIM2->CCMR1|=1<<0; //CC1S=01 选择输入端 IC1映射到TI1上
TIM2->CCMR1|=1<<4; //IC1F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
TIM2->CCMR1|=0<<10; //IC2PS=00 配置输入分频,不分频
④设置TIM2的CCER,开启输入捕获,并设置上升沿捕获
TIM2_CCER寄存器是定时器的开关,并且可以设置输入捕获的边沿。
捕获/比较使能寄存器(TIMx_CCER)
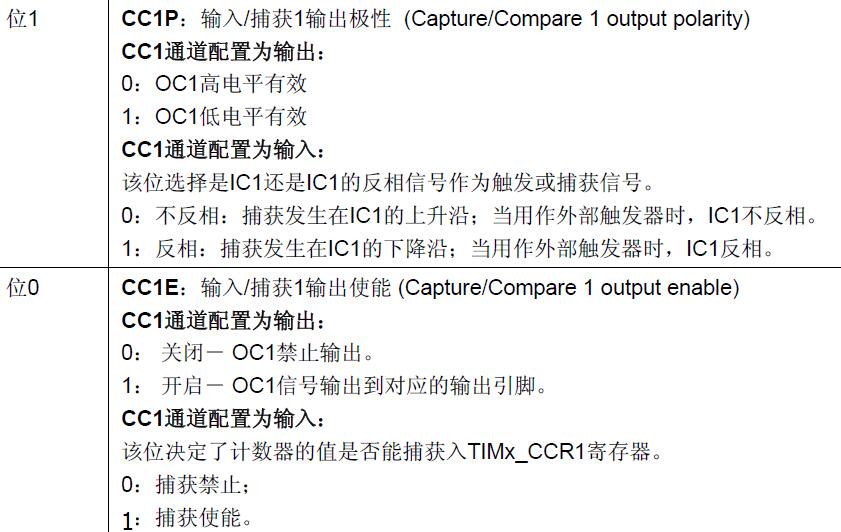
Eg: TIM2->CCER|=0<<1; //CC1P=0 上升沿捕获
TIM2->CCER|=1<<0; //CC1E=1 允许捕获计数器的值到捕获寄存器中
⑤设置TIM2的DIER,使能捕获和更新中断,并编写中断服务函数
DMA/中断使能寄存器(TIMx_DIER)

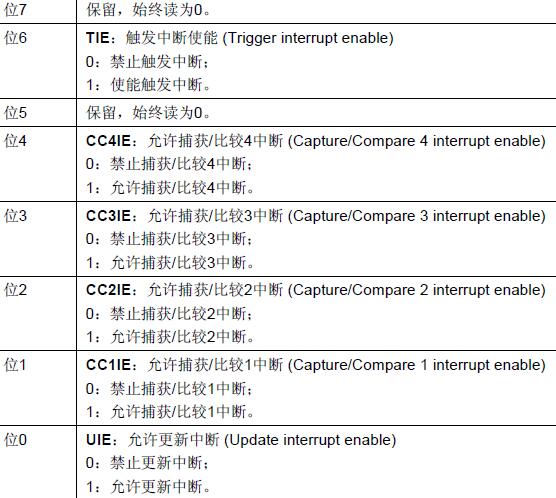
Eg:TIM2->DIER|=1<<1; //允许捕获中断
TIM2->DIER|=1<<0; //允许更新中断
⑥设置TIM2的CR1使能定时器
最后打开定时器的计数器开关,启动TIM2计数器,开始输入捕获。
控制寄存器1(TIMx_CR1)
![]()

2.TIM2 PA0计数应用
1 //定时器2通道1输入捕获配置 2 //arr:自动重装值 3 //psc:时钟预分频数 4 void TIM2_Cap_Init(u16 arr,u16 psc) 5 { 6 RCC->APB1ENR|=1<<0; //TIM2 时钟使能 7 RCC->APB2ENR|=1<<2; //使能PORTA时钟 8 9 GPIOA->CRL&=0XFFFFFFF0; //PA0 清除之前设置 10 GPIOA->CRL|=0X00000008; //PA0 输入 11 GPIOA->ODR|=0<<0; //PA0 下拉 12 13 TIM2->ARR=arr; //设定计数器自动重装值 14 TIM2->PSC=psc; //预分频器 15 16 TIM2->CCMR1|=1<<0; //CC1S=01 选择输入端 IC1映射到TI1上 17 TIM2->CCMR1|=1<<4; //IC1F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效 18 TIM2->CCMR1|=0<<10; //IC2PS=00 配置输入分频,不分频 19 20 TIM2->CCER|=0<<1; //CC1P=0 上升沿捕获 21 TIM2->CCER|=1<<0; //CC1E=1 允许捕获计数器的值到捕获寄存器中 22 23 TIM2->DIER|=1<<1; //允许捕获中断 24 TIM2->DIER|=1<<0; //允许更新中断 25 TIM2->CR1|=0x01; //使能定时器2 26 MY_NVIC_Init(2,0,TIM2_IRQn,2);//抢占2,子优先级0,组2 27 } 28 29 //定时器2中断服务程序 30 void TIM2_IRQHandler(void) 31 { 32 u16 tsr; 33 tsr=TIM2->SR; 34 if(tsr&0x02)//捕获1发生捕获事件 35 { 36 cishu++; 37 38 } 39 TIM2->SR=0;//清除中断标志位 40 }
//测试.c TIM2_Cap_Init(25,0); while(1) { printf("cishu:%d us ",cishu); }
//不知为何cnt读数为0.。。