1.引脚定义
| 标号 | 引脚 | 第二功能 | 说明 |
| P3.0 | 10 | RXD | 串行输入口 |
| P3.1 | 11 | TXD | 串行输出口 |
| P3.2 | 12 | INT0(上划线) | 外部中断0 |
| P3.3 | 13 | INT1(上划线) | 外部中断1 |
| P3.4 | 14 | T0 | 定时器/计数器0 外部输入端 |
| P3.5 | 15 | T1 | 定时器/计数器1 外部输入端 |
| P3.6 | 16 | WR(上划线) | 外部数据存储器写脉冲 |
| P3.7 | 17 | RD(上划线) | 外部数据存储器读脉冲 |
XTAL1(19脚) XTAL2(18脚):外接时钟引脚。XTAL1为片内震荡电路的输入端,XTAL2为片内震荡电路的输出端。
8051时钟两种方式:①片内时钟震荡,两引脚外接晶振和震荡电容。
②外部时钟方式,XTAL1接地,外部时钟信号从XTAL2脚输入。
RST(9脚):单片机复位引脚。当输入连续两个机器周期以上高电平时为有效。复位后程序计数器PC=0000H,读取第一条指令码。即从头开始执行程序。
ALE(30脚):在没有外部存储器期间,ALE以1/6振荡周期频率输出(6分频),当访问外部存储器时,以1/12振荡周期输出(12分频)。
EA(上划线)(31脚):接高电平时,单片机读取内部程序存储器。接低电平,单片机直接读取外部(ROM)。(板子上直接接高)
P0口(39~32脚):双向8位三态I/O口,早期51芯片内部无上拉电阻,为高阻态,需外部接上拉电阻。
P1口(1~8脚):准双向8位I/O口,之所以称它为"准双向",是因为改口作为输入使用前,要先向该口进行写1操作,有个"准"备过程,称为准双向口。
P2口(21~28脚):准双向8位I/O口。
P3口(10~17脚):准双向8位I/O口。
2.复位电路
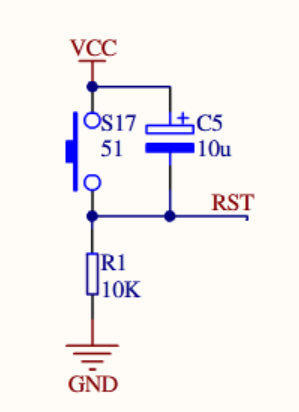
按键按下,RST=5V,按键时长大于两个时钟周期,则复位。
上电自动复位:上电瞬间,电容充电,之后电容放电,τ = √(RC) >两个时钟周期 ,自动复位。
3.晶振
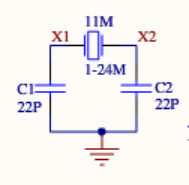
非极性电容,上电帮助晶振起振。12M左右 30pf,6M左右20pf。具体参考厂家提供的晶振要求负载电容选值。(Day0有详细介绍)
4.数码管
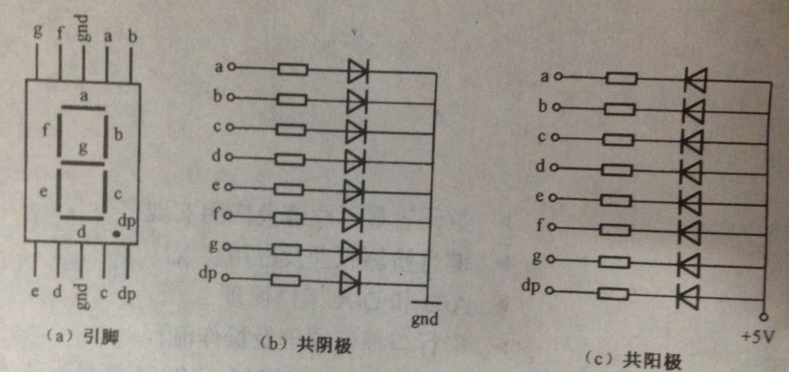
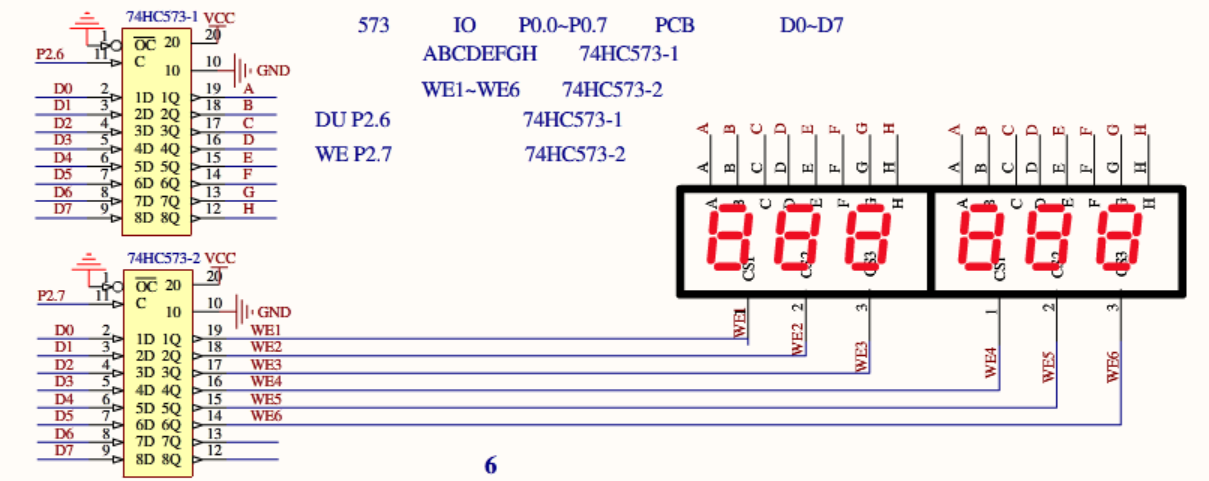
开发板中用的为共阴极。即WE选信号给低,则导通(WE提供一个GND作用)。
利用74HC573锁存器的锁存功能。(详细见Day0 ⑤锁存器),先控制位选信号P2.7口高,选定哪个数码管,后P2.7低锁存。再控制段选信号P2.6高,亮什么数字后,P2.6低锁存。
1 //共阴极数码管静态显示1 2 #include <reg52.h> 3 sbit DUAN = P2^6; 4 sbit WE = P2^7; 5 6 int main() 7 { 8 WE = 1; //打开WE选信号 9 P0 = 0xDF; //选WE6的数码管,给低,其余给高 10 WE = 0; //关闭WE选信号 11 DUAN = 1; //打开段选信号 12 P0 = 0x06; //亮1,即bc接高,其余低 13 DUAN = 0; //关闭段选信号 14 15 return 0; 16 }
 超级亮,但是别的数码管有淡淡的光,以下进行改进
超级亮,但是别的数码管有淡淡的光,以下进行改进
1 //共阴极数码管静态显示1 防干扰 2 #include <reg52.h> 3 sbit DUAN = P2^6; 4 sbit WE = P2^7; 5 6 int main() 7 { 8 WE = 1; 9 P0 = 0xDF; 10 WE = 0; 11 P0 = 0xFF; //关闭所有显示,防止打开段选后发生混乱 12 DUAN = 1; 13 P0 = 0x06; 14 DUAN = 0; 15 P0 = 0xFF; //关闭所有显示,防止打开位选后发生混乱 16 17 return 0; 18 }
接下来是数码管的动态扫描,其实是一个个显示,由于频率太快,人眼无法识别,达到目的。
1 //共阴极数码管动态显示 2 #include <reg52.h> 3 sbit DUAN = P2^6; 4 sbit WE = P2^7; 5 unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07, 6 0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71}; 7 unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF}; 8 void delayms(unsigned int n); 9 int main() 10 { 11 unsigned int i = 0; 12 while(1) 13 { 14 for(i = 0; i < 6; i++) { 15 DUAN = 1; 16 P0 = DuanTable[i+1]; 17 DUAN = 0; 18 P0 = 0xFF; 19 WE = 1; 20 P0 = WeTable[i]; 21 WE = 0; 22 P0 = 0xFF; 23 delayms(1); 24 } 25 } 26 return 0; 27 } 28 29 void delayms(unsigned int n) //误差 -0.651041666667us 30 { 31 unsigned char a,b; 32 unsigned int i; 33 for(i = 0; i < n; i++) { 34 for(b=4;b>0;b--) 35 for(a=113;a>0;a--); 36 } 37 }

5.中断
52单片机共有6个中断源
INT0:外部中断0.由P3.2端口线引入,低电平或下降沿引起。
INT1:外部中断1.由P3.3端口线引入,低电平或下降沿引起。
T0:定时器/计数器0中断,由T0计数器计满回零引起。
T1:定时器/计数器1中断,由T1计数器计满回零引起。
T2:定时器/计数器2中断,由T2计数器计满回零引起。
TI/RI:串行口中断,串行端口完成一帧字符发送/接收后引起。
| 中断源 | 默认中断级别 | 序号(C语言用) | 入口地址(汇编语言用) |
| INT0 外部中断0 | 最高 | 0 | 0003H |
| T0 定时器/计数器0中断 | 第2 | 1 | 000BH |
| INT1 外部中断1 | 第3 | 2 | 0013H |
| T1 定时器/计数器1中断 | 第4 | 3 | 001BH |
| TI/RI 串行口中断 | 第5 | 4 | 0023H |
| T2 定时器/计数器2中断 | 最低 | 5 | 002BH |
|
位序号
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
说明
|
全局中断位
|
无效位
|
定时/计数2
(52单片机)
|
串行口中断
|
定时/计数1
|
外部中断1
|
定时/计数0
|
外部中断0
|
|
位符号(写程序时可直接引用)
|
EA
|
--
|
ET2
|
ES
|
ET1
|
EX1
|
ET0
|
EX0
|
|
位地址
|
AFH
|
--
|
ADH
|
ACH
|
ABH
|
AAH
|
A9H
|
A8H
|
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 说明 | 无效位 | 无效位 | 无效位 | 串行口中断优先级控制位 | 定时器/计数器1中断优先级控制位 | 外部中断1中断优先级控制位 | 定时器/计数器0中断优先级控制位 | 外部中断0中断优先级控制位 |
| 位符号 | -- | -- | -- | PS | PT1 | PX1 | PT0 | PX0 |
| 位地址 | -- | -- | -- | BCH | BBH | BAH | B9H | B8H |
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 位符号 | GATE | C/T(上划线) | M1 | M0 | GATE | C/T(上划线) | M1 | M0 |
| 定时器1 | 定时器0 | |||||||
单片机复位时全部清零。不可进行位寻址。
GATE:
GATE = 0 定时器/计数器启动与停止仅受TCON寄存器中TRX(X=0,1)来控制。
C/T(上划线):定时器模式和计数器模式选择位
C/T=0时为定时模式: 加1计数器对脉冲f进行计数,每来一个脉冲,计数器加1,直到计时器TFx满溢出。
C/T=1时为计数模式: 加1计数器对来自输入引脚T0(P3.4)和T1(P3.5)的外信号脉冲进行计数,每来一个脉冲,计数器加1,直到计时器TFx满溢出。
|
M1
|
M0
|
工作方式
|
功能说明
|
|
0
|
0
|
方式0
|
13位定时器/计数器
|
|
0
|
1
|
方式1
|
16位定时器/计数器
|
|
1
|
0
|
方式2
|
自动重载8位定时器/计数器
|
|
1
|
1
|
方式3
|
T0分为2个8位独立计数器,T1无方式3
|
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 位符号 | TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 |
| 位地址 | 8FH | 8EH | 8DH | 8CH | 8BH | 8AH | 89H | 88H |
| 定时器/计数器控制 | 外部中断控制 | |||||||
1 //外部中断0 低电平触发 2 #include <reg52.h> 3 sbit DUAN = P2^6; 4 sbit WE = P2^7; 5 unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07, 6 0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71}; 7 unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF}; 8 void delayms(unsigned int n); 9 int main() 10 { 11 unsigned int i = 0; 12 EA = 1;//打开总中断 13 EX0 = 1;//打开外部中断0中断 14 //IT0 = 0; 电平触发 由于TCON在复位时自动清零,所以可以省略 15 while(1) 16 { 17 for(i = 0; i < 6; i++) { 18 DUAN = 1; 19 P0 = DuanTable[i+1]; 20 DUAN = 0; 21 P0 = 0xFF; 22 WE = 1; 23 P0 = WeTable[i]; 24 WE = 0; 25 P0 = 0xFF; 26 delayms(1); 27 } 28 } 29 return 0; 30 } 31 32 void delayms(unsigned int n) //误差 -0.651041666667us 33 { 34 unsigned char a,b; 35 unsigned int i; 36 for(i = 0; i < n; i++) { 37 for(b=4;b>0;b--) 38 for(a=113;a>0;a--); 39 } 40 } 41 42 void exter0() interrupt 0 //中断函数无需在main前声明 中断全部显示0 P3,2口INT0 43 { 44 int i = 0; 45 for(i = 0; i < 6; i++) { 46 DUAN = 1; 47 P0 = DuanTable[0]; 48 DUAN = 0; 49 P0 = 0xFF; 50 WE = 1; 51 P0 = WeTable[i]; 52 WE = 0; 53 P0 = 0xFF; 54 delayms(1); 55 } 56 }
 中断ing
中断ing
//定时器0中断 方式1 中断显示0 #include <reg52.h> sbit DUAN = P2^6; sbit WE = P2^7; unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07, 0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71}; unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF}; unsigned int t = 0; void delayms(unsigned int n); int main() { unsigned int i = 0; TMOD = 0x01; //TMOD不能位寻址 定时器0工作方式1 TH0 = (65535 - 50000) / 256; TL0 = (65535 - 50000) % 256; EA = 1;//打开总中断 ET0 = 1;//打开定时器0中断 TR0 = 1; while(1) { for(i = 0; i < 6; i++) { DUAN = 1; P0 = DuanTable[i+1]; DUAN = 0; P0 = 0xFF; WE = 1; P0 = WeTable[i]; WE = 0; P0 = 0xFF; delayms(1); } if(t >= 100) { for(i = 0; i < 6; i++) { DUAN = 1; P0 = DuanTable[0]; DUAN = 0; P0 = 0xFF; WE = 1; P0 = WeTable[i]; WE = 0; P0 = 0xFF; delayms(1); } if(t >= 250) t = 0; } } return 0; } void delayms(unsigned int n) //误差 -0.651041666667us { unsigned char a,b; unsigned int i; for(i = 0; i < n; i++) { for(b=4;b>0;b--) for(a=113;a>0;a--); } } void T0_Time() interrupt 1 //中断函数无需在main前声明 中断全部显示0 P3,2口INT0 { TH0 = (65535 - 50000) / 256; TL0 = (65535 - 50000) % 256; t++; }
practice:
59s循环计时。
1 //60s倒计时 定时器0中断+数码管显示 2 #include <reg52.h> 3 sbit DUAN = P2^6; 4 sbit WE = P2^7; 5 unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07, 6 0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71}; 7 unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF}; 8 unsigned int t = 0, num = 59; 9 void delayms(unsigned int n); 10 int main() 11 { 12 unsigned int i = 0; 13 TMOD = 0x01; //TMOD不能位寻址 定时器0工作方式1 14 TH0 = (65535 - 50000) / 256; 15 TL0 = (65535 - 50000) % 256; 16 EA = 1;//打开总中断 17 ET0 = 1;//打开定时器0中断 18 TR0 = 1; 19 while(1) 20 { 21 //十位数 22 DUAN = 1; 23 P0 = DuanTable[num/10]; 24 DUAN = 0; 25 P0 = 0xFF; 26 WE = 1; 27 P0 = WeTable[4]; 28 WE = 0; 29 P0 = 0xFF; 30 delayms(5); 31 32 //个位数 33 DUAN = 1; 34 P0 = DuanTable[num%10]; 35 DUAN = 0; 36 P0 = 0xFF; 37 WE = 1; 38 P0 = WeTable[5]; 39 WE = 0; 40 P0 = 0xFF; 41 delayms(1); 42 43 } 44 return 0; 45 } 46 47 void delayms(unsigned int n) //误差 -0.651041666667us 48 { 49 unsigned char a,b; 50 unsigned int i; 51 for(i = 0; i < n; i++) { 52 for(b=4;b>0;b--) 53 for(a=113;a>0;a--); 54 } 55 } 56 57 void T0_Time() interrupt 1 //中断函数无需在main前声明 中断全部显示0 P3,2口INT0 58 { 59 TH0 = (65535 - 50000) / 256; 60 TL0 = (65535 - 50000) % 256; 61 t++; 62 if(t >= 20) { 63 num--; 64 t = 0; 65 } 66 67 if(num == 0) 68 num = 59; 69 }