D-Bus三层架构
D-Bus是一个为应用程序间通信的消息总线系统, 用于进程之间的通信。它是个3层架构的IPC 系统,包括:
1、函数库libdbus ,用于两个应用程序互相联系和交互消息。
2、一个基于libdbus构造的消息总线守护进程,可同时与多个应用程序相连,并能把来自一个应用程序的消息路由到0或者多个其他程序。
3、基于特定应用程序框架的封装库或捆绑(wrapper libraries or bindings )。例如,libdbus-glib和libdbus-qt,还有绑定在其他语言,例如Python的。大多数开发者都是使用这些封装库的API,因为它们简化了D-Bus编程细节。libdbus被有意设计成为更高层次绑定的底层后端(low-levelbackend )。大部分libdbus的 API仅仅是为了用来实现绑定。
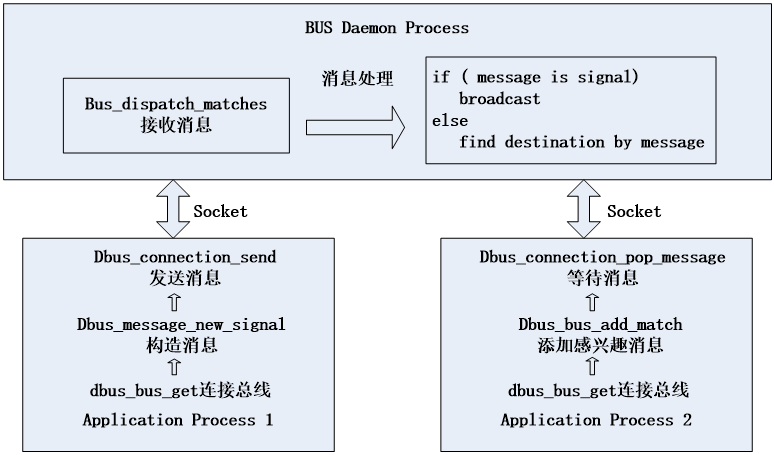
D-Bus进程通信简单框架
DBUS中消息分为四类:
1. Methodcall消息:将触发一个函数调用 ;
2. Methodreturn消息:触发函数调用返回的结果;
3. Error消息:触发的函数调用返回一个异常 ;
4. Signal消息:通知,可以看作为事件消息。
2.2 连接到总线
进程间通信前,需要连接到总线。调用dbus_bus_get函数连接进程到总线,建立进程和总线之间的连接(DBusConnection)。建立连接后,需要为这个连接注册名称,方便后面对这个连接进行操作,调用dbus_bus_request_name函数对连接进行注册名称。
建立连接和注册名称是在程序开始时执行,程序结束时,调用dbus_connection_close函数关闭一个连接。函数接口声明如程序清单 2‑1所示。
程序清单 2-1 建立、注册名称和关闭连接
DBusConnection *dbus_bus_get (DBusBusType type, DBusError *error) /* 建立和总线的连接 */
int dbus_bus_request_name (DBusConnection *connection,
const char *name,
unsigned int flags,
DBusError *error) /* 注册连接名称 */
void dbus_connection_close (DBusConnection *connection) /* 关闭连接 */
2.3 信号发送与接收
2.3.1 信号发送
DBUS中信号是一种广播的消息,当发出一个信号,所有连接到 DBUS 总线上并注册了接受对应信号的进程,都会收到该信号。
进程发出一个信号前,需要创建一个 DBusMessage 对象来代表信号,然后追加上一些需要发出的参数,就可以发向总线了。发完之后需要释放消息对象。信号发送的函数声明如程序清单 2‑2所示。
程序清单2-2 信号发送接口
DBusMessage *dbus_message_new_signal (const char *path,
const char *iface,
const char *name) /* 创建信号类型消息 */
void dbus_message_iter_init_append ( DBusMessage *message,
DBusMessageIter *iter) /* 加入参数到信号 */
dbus_bool_t dbus_connection_send ( DBusConnection *connection,
DBusMessage *message,
dbus_uint32_t *serial) /* 发送信号到总线 */
void dbus_message_unref (DBusMessage *message) /* 释放消息 */
2.3.2 信号接收
进程接收信号时,需先告知总线进程感兴趣的消息,然后等待接收消息。信号接收函数声明如程序清单 2‑3所示。
程序清单 2-3 信号接收接口
void dbus_bus_add_match ( DBusConnection *connection,
const char *rule,
DBusError *error) /* 告知总线感兴趣的消息 */
DBusMessage *dbus_connection_pop_message ( DBusConnection *connection) /* 接收消息 */
dbus_bool_t dbus_message_is_signal (DBusMessage *message,
const char *iface,
const char *signal_name) /* 判断消息是否为信号 */
2.4 函数调用和提供函数调用
2.4.1 函数调用
调用一个远程函数与发送一个信号原理类似,需要先创建一个消息(DBusMessage),然后通过注册在 DBUS上的名称指定发送的对象。然后追加相应的参数,调用方法分为两种,一种是阻塞式的,另一种为异步调用。异步调用的时候会得到一个“DBusMessage *” 类型的返回消息,从这个返回消息中可以获取一些返回的参数。
函数调用的函数声明如程序清单 2‑4所示。
程序清单 2-4 函数调用接口
DBusMessage *dbus_message_new_method_call (const char *destination,
const char *path,
const char *iface,
const char *method) /* 创建一个函数调用消息 */
void dbus_message_iter_init_append (DBusMessage *message,
DBusMessageIter *iter) /* 为消息添加参数 */
dbus_bool_t dbus_connection_send_with_reply (DBusConnection *connection,
DBusMessage *message,
DBusPendingCall **pending_return,
int timeout_milliseconds) /* 发送消息 */
void dbus_pending_call_block (DBusPendingCall *pending) /* 阻塞等待返回值 */
DBusMessage *dbus_pending_call_steal_reply (DBusPendingCall *pending) /* 获得返回消息 */
dbus_bool_t dbus_message_iter_init (DBusMessage *message,
DBusMessageIter *iter) /* 获取参数 */
2.4.2 接收函数调用
提供远程函数调用,首先需告知总线进程感兴趣的消息,其次从总线获取消息并判定消息是方法调用。然后从消息中获取参数进行函数执行,最后创建返回消息,并发送消息至总线,由总线转发至调用的进程。函数声明如程序清单 2‑5所示。
程序清单 2-5 接收函数调用接口
void dbus_bus_add_match ( DBusConnection *connection,
const char *rule,
DBusError *error) /* 请求获取调用消息 */
DBusMessage *dbus_connection_pop_message ( DBusConnection *connection) /* 从总线获取消息 */
dbus_bool_t dbus_message_is_method_call (DBusMessage *message,
const char *iface,
const char *method) /* 判定消息是方法调用 */
dbus_bool_t dbus_message_iter_init (DBusMessage *message,
DBusMessageIter *iter) /* 获取参数 */
DBusMessage *dbus_message_new_method_return (DBusMessage *method_call) /* 创建返回消息 */
void dbus_message_iter_init_append ( DBusMessage *message,
DBusMessageIter *iter) /* 在消息中填入参数 */
dbus_bool_t dbus_connection_send ( DBusConnection *connection,
DBusMessage *message,
dbus_uint32_t *serial) /* 发送返回消息 */
参考资料:
http://blog.csdn.net/eastmoon502136/article/details/10044993
https://blog.csdn.net/mr_wangning/article/details/60324291
https://www.cnblogs.com/liyiwen/archive/2012/12/02/2798876.html