一、工具链的制作
1.1 工具
软件工具:crosstool-ng
下载地址:git clone https://github.com/crosstool-ng/crosstool-ng
crosstool-ng的环境需要libncurse5-dev
sudo apt-get install libncurse5-dev
安装autoconf: sudo apt-get install autoconf
进入crosstool-ng目录,执行./bootstrap,生成 configure 执行文件
检查安装环境,报什么错,就安装什么软件:./configure --prefix=`pwd`/crosstool
需要的软件有:
sudo apt-get install gperf bison flex texinfo help2man gawk
执行命令 make执行命令:
make install
export PATH="${PATH}:`pwd`/crosstool/bin"
1.2 开始制作
1.2.1 建立目标文件夹
根目录下建立三个文件夹:
mkdir src x-tools crosstool

1.2.2 环境
进入crosstool目录:cd ~/.crosstool
执行:ct-ng list-samples
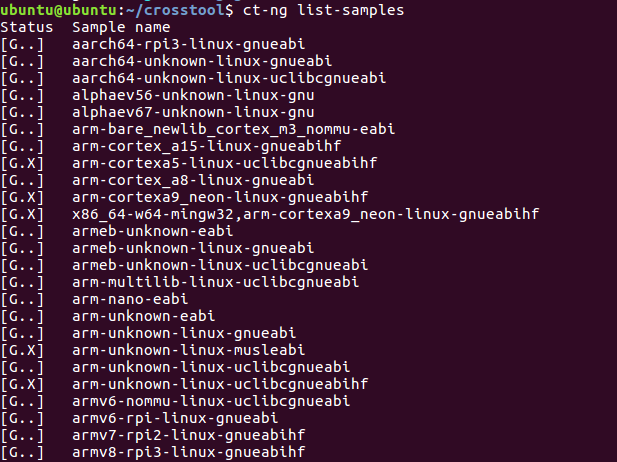
选择arm-unknown-linux-gnueabi 作为交差编译工具链的模版
执行命令:ct-ng show-arm-unknown-linux-gnueabi,查看编译交差编译工具链所需要的配置

下载gcc 6.3.0:wget http://ftp.gnu.org/gnu/gcc/gcc-6.3.0/gcc-6.3.0.tar.gz

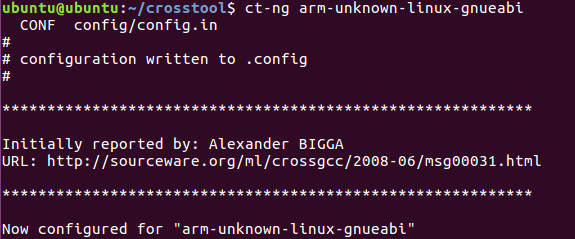
执行命令:ct-ng arm-unknown-linux-gnueabi
执行命令:ct-ng menuconfig

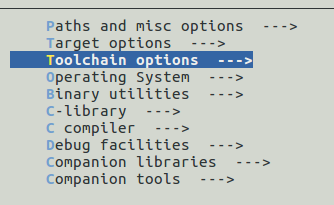
选择 Target options
*** Target optimisations ***
(armv4t) Architecture level :指令集架构,exynos4412为armv7-a架构,-march=name
(arm920t) Emit assembly for CPU :CPU核心类型, -mcpu=name
() Tune for CPU:对CPU的优化,具体可以查看芯片手册,-mtune=name

最新版本的crosstool-ng只需要选择第一二项目就好了。
选择 toolchain options:

u-boot 2016.01 不支持GCC6,因此 要把 GCC的版本改成GCC5.0版本--GCC6.0版本之间。
保存退出。
1.2.3 编译
执行命令:ct-ng build

编译成功:

建立环境变量:
vim .bashrc,加入下面一行
PATH=~/x-tools/arm-s3c2440a-linux-gnueabihf/bin:$PATH/
执行 source .bashrc
执行 arm-s3c2440a-linux-gnueabi-gcc -v

u-boot 2016.01 不支持GCC6,因此 要把 GCC的版本改成GCC5.0版本--GCC6.0版本之间。
二、u-boot 工作目录建立
下载u-boot_2016.01版本,解压u-boot。

2.1 board目录修改
2.1.1 创建jz2440板
查看 ../board/samsung/ 目录下的文件:

此版本中,2440已经被遗弃。所以选定smdk2410为模版创建2440的u-boot。

2.1.2 jz2440文件名修改
修改文件名:

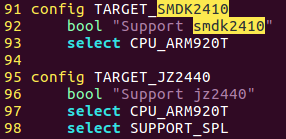
2.1.3 Kconfig修改
修改Kconfig和Makefile文件,将里面的smdk2410修改为jz2440,如下:
Kconfig文件:
2.1.4 Makefile修改
2.2 修改头文件

头文件中增加内容:

添加对S3C2440的支持
找到包含smdk2410.h这个头文件的文件:

没有需要修改的地方
2.3 修改配置文件
当前新版的u-boot与linux源码一样,都执行make menuconfig 进行配置,所以在configs目录下要有jz2440的配置。
config目录下配置:


2.5 修改arch/arm下的配置文件
arch/arm/Kconfig,里面添加对jz2440的支持

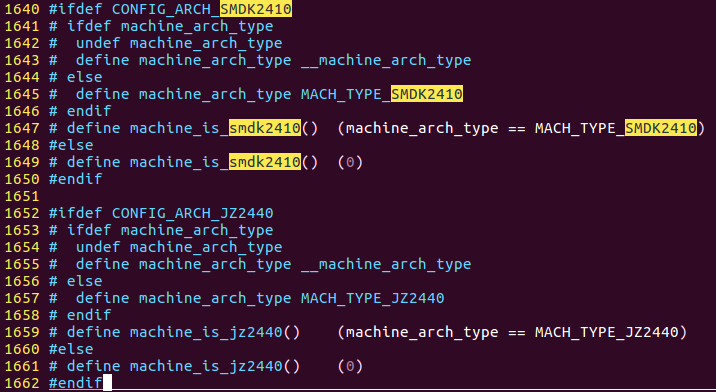
2.6 修改rch/arm/include/asm/mach-types.h

三、配置.config及编译u-boot
3.1 配置.config
执行命令:make jz2440_defconfig

执行命令:make menuconfig
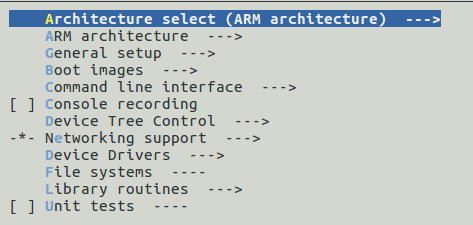
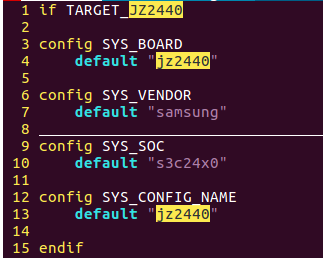
在ARM architecture中选择target_select项,然手选择jz2440:

配置 u-boot的命令行提示符:
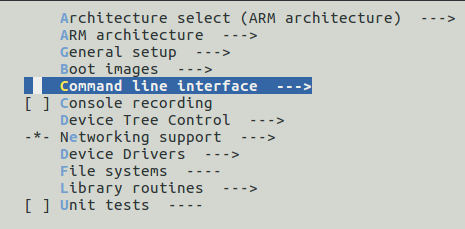

保存退出配置。
3.2 编译

编译成功:
四、编译错误
4.1 Not enough room for program headers
arm-2440-linux-gnueabi-ld.bfd: u-boot: Not enough room for program headers, try linking with -N
arm-2440-linux-gnueabi-ld.bfd: final link failed: Bad value
make: *** [Makefile:1193: u-boot] Error 1
解决方法:https://www.mail-archive.com/u-boot@lists.denx.de/msg235861.html
在根目录的Makefile中加上如下几行:
