安装Arsuino IDE
sudo apt-get install arduino
设置库文件路径
在使用ROS的库文件时,必须在代码的开头包括:
#include <ros.h>
接下来安装rosserial
sudo apt-get install ros-indigo-rosserial-arduino sudo apt-get install ros-indigo-rosserial
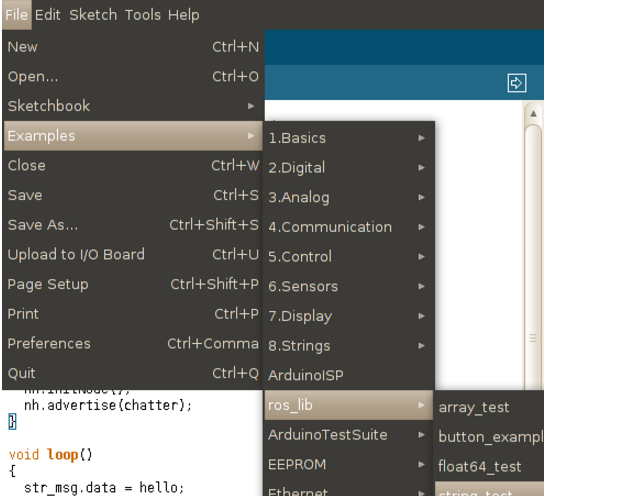
安装ros_lib
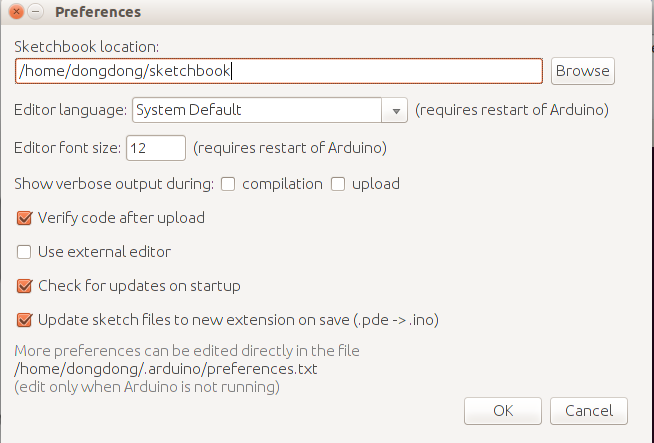
打开你的sketchbook目录,在下面新建一个libraries目录,一般shetchbook的目录可以在file->preference中查看和设置。在你安装ubuntu版的arduino IDE后打开。
查看库文件安转目录
/home/dongdong/sketchbook
进入库安装目录,执行
m -rf ros_lib rosrun rosserial_arduino make_libraries.py .
重新打开aduino,会看到安装的库文件样例