仿真作业
主要方程式:

选用四段电阻进行逐级调节
在短路启动电阻R1时,短路R1前电流I1,转矩Tm1,转速n1,短路R1后电流i1’
在短路启动电阻R2时,短路R2前电流I2,转矩Tm2,转速n2,短路R2后电流i2’
在短路启动电阻R3时,短路R3前电流I3,转矩Tm3,转速n3,短路R3后电流i3’
在短路启动电阻R4时,短路R4前电流I4,转矩Tm4,转速n4,短路R4后电流i4’
假设分段短路启动电阻过程每次均等待这一过程中的转速已达到稳定,即dn/dt=0时再短路下一个启动电阻.
在初始阶段,未短路任何电阻时:
Tm1=Kt*I1
Tm1-Tl=J*(dn1/dt)*(2π/60)
U=ke*n1+I1(R+R1+R2+R3+R4)
短接R1后
U=I1’(R+R2+R3+R4)+Ke*n1
(R+R1+R2+R3+R4)/ (R+R2+R3+R4)=I1’/I1
同理可得:
(R+R2+R3+R4)/ (R+ R3+R4)=I2’/I2
(R+ R3+R4)/ (R+ R4)= I3’/I3
(R+ R4)/R= I4’/I4
由书本P35的电动机启动特性图知
I1=I2=I3=I4=16.2A
I1‘=I2’=I3‘=I4’(尖峰转矩相同)
设I1’/I1=K
将之与上述十个方程进行联立
得
R4=(k-1)R
R3=(k-1)2R+(k-1)R
R2=(k-1)3R+2(k-1)2R+(k-1)R
R1=(k-1)4R+3(k-1)3R+3(k-1)2R+(k-1)R
设电动机刚刚启动时,启动电流I=I1’(即与之后切换时的尖峰电流相同)(k<3)
U=I(R+R1+R2+R3+R4)
与前式联立得:
K5R=U/I1
K=1.8989<3 符合题意
R4=0.5393
R3=1.0241
R2=1.9448
R1=3.6929
单位:欧姆
T2=(1.1~1.2)Tn
需调节时间使最小电流位于(1.1~1.2)x16.2A=17.82~19.44A之间
调节后程序如下
model motor1 "An DC Motor Model"
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Speed=Real(unit="r/min");
type Torque=Real(unit="N.m");
type Inertia=Real(unit="kg.m^2");
Torque Tm"Torque of the Motor";
Speed n"Speed of the Motor";
Current i"Armature Current";
Voltage u"Voltage Source";
Resistance R_ad"External Resistance";
Resistance R1"Start-up Resistance";
Resistance R2"Start-up Resistance";
Resistance R3"Start-up Resistance";
Resistance R4"Start-up Resistance";
parameter Real J = 1"Total Inertia";
parameter Real R = 0.6"Armature Resistance";
parameter Real Kt = 1.8"Torque Constant";
parameter Real Ke = 0.189"EMF Constant";
parameter Real Tl = 29.2"Load Torque";
parameter Real i1=48.6"Maximum Current";
parameter Real i2=17.8"Minimum Current";
parameter Real i3=19.4"Maximum Current";
equation
Tm-Tl = J * der(n) * 6.28 / 60;
Tm= Kt * i;
u= i * (R+R_ad+R1+R2+R3+R4) + Ke * n;
if time <= 0.1 then
u = 0;
R_ad = 0;
else
u = 240;
R_ad = 0;
end if;
if time <= 4.2 then
R1=3.6929;
else
R1=0;
end if;
if time <= 6.7 then
R2=1.9448;
else
R2=0;
end if;
if time <= 8 then
R3=1.0241;
else
R3=0;
end if;
if time <= 8.7 then
R4=0.5393;
else
R4=0;
end if;
end motor1;
画出图像如下:
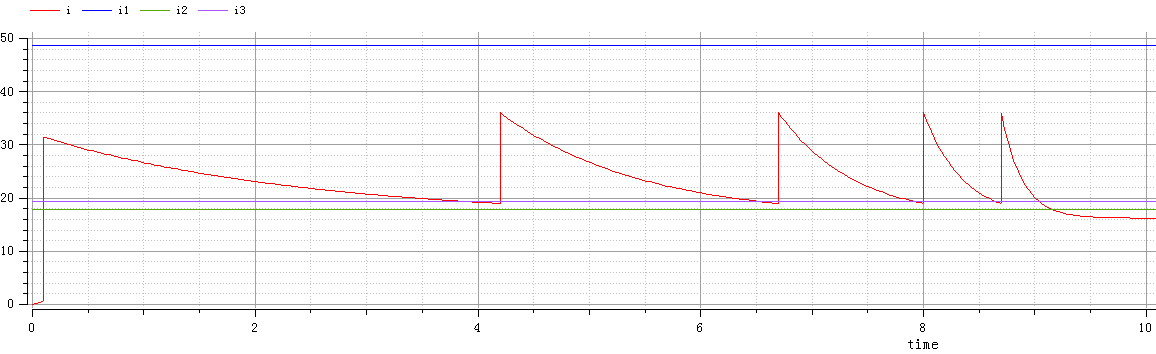

稳定时间为9.5s