iwehdio的博客园:https://www.cnblogs.com/iwehdio/
1、散列
-
循值访问:直接根据数据的值进行访问。
-
散列表(哈希表):
- 桶bucket:直接存放或间接指向一个词条。
- 桶数组bucket array,容量为M,至少应大于所要容纳的数据大小。
- 散列:根据词条的key(散列码),直接确定散列表中这个词条的入口位置(通过散列/哈希函数)。
- 装填因子:散列表中实际存储的词条数 / 散列表长度。
- 散列冲突:两个不同的key,但是被映射到了同一个桶单元。
-
两项基本任务:
- 精心设计散列表和散列函数,以尽可能降低冲突的概率。
- 制定可行的预案,在冲突发生时排解冲突。
-
散列函数:
- 散列冲突是无法杜绝的,只能通过设计散列函数降低冲突发生的概率。
- 该函数功能是,从词条空间(可能的词条)映射到地址空间(散列表),因为前者远大于后者,该函数不可能是单射。
- 可以得到近似的单射:如将彩色图转换为灰度图。
-
散列函数的设计原则:
- 确定:同一关键码总是被映射到同一地址。
- 快速:映射的计算快速。
- 满射:尽可能充分覆盖整个散列空间。
- 均匀:各个关键码被映射到散列表各个位置的概率接近。
-
散列函数选取:
- 除余法:
- 将词条的key除以表长M。
- 表长取为素数时,发生冲突的概率较小。
- 缺陷:0点是不动点;相邻关键码的散列地址也相邻(零阶均匀)。
- MAD法:在除余法的基础上加入a和b两个参数,
hash(key)=(a*key+b)%M。 - 数字分析:抽取key中的某几位,构成地址。
- 平方取中:取key^2的中间几位,构成地址。
- 折叠法:将key分割为等宽的若干段,取其总和作为地址。
- 位异或法:将key分割成等宽的二进制段,经异或得到地址。
- 伪随机数法:伪随机数发生器实际上是根据不同的种子获得的确定序列。但是不同平台上实现可能不同,移植性差。
- 除余法:
-
字符串转换为散列值(关键码转为散列码):
- 多项式法:
- 将字符串中每个字符分别转换为整数,然后将这些整数作为一个n次多项式的系数,计算总和。
- 近似多项式法:使用位运算模拟多项式运算。
- 如果简单使用将字符串中每个字符分别转换为整数然后相加的方法,字符串的冲突概率很高。
- 多项式法:
-
冲突排解:
- 多槽位:
- 将桶单元细分成若干个槽位,存放与同一单元冲突的词条。
- 难以预测每个桶需要多少个槽位,难以平衡空间和时间效率。
- 独立链:
- 桶单元中存放一个指针,冲突的词条组织成一个列表。
- 无需为每个桶预留空间,任意多次的冲突都可以解决。
- 但是,指针需要额外空间,节点需要动态申请。
- 空间未必连续分布,系统缓存几乎失效。
- 多槽位:
-
开放定址:
- 与独立链的封闭定址相对应。
- 为每个同都事先约定若干个备用桶,他们构成一个查找链。
- 当一个词条要存储时,不同的桶对其有不同的优先级。查找链就是从优先级最高的桶开始,往优先级低的方向。
- 闭散列:散列表是一块连续的空间,所有的散列和冲突排解都在这块封闭的空间内完成。
- 查找过程:沿查找链逐个转向下一个桶单元。直到命中(成功),或抵达一个空桶(失败)。
-
查找链的组织:
- 线性试探:
- 一旦冲突,则试探后一个紧邻的桶单元。
- 无需额外空间。具有局部性,可充分利用系统缓存。
- 但是为了消除以往的冲突,可能会导致后续的冲突。
- 懒惰删除:
- 如果直接删除,会导致查找链被切断,后续词条将丢失。
- 懒惰删除:仅做删除标记而不清空,查找链仍然连续。
- 平方试探:
- 线性试探的问题:试探的间距太小。
- 以平方数为距离,确定下一试探桶单元。
- 数据聚集现象有所缓解。
- 若涉及外存操作,IO访问将激增。但仍是可接受的。
- 在平方试探的情况下,有可能出现有空桶但试探不到的情况:
- 如果表长M为合数,则能试探的的桶必然少于[M/2]个。
- 如果表长M为素数,则能试探的的桶恰好为[M/2]个。
- 也就是说,在装填因子小于0.5,表长M为素数时,可保证起始于任何位置的查找都找得到(查找的前[M/2]项是互异的)。
- 双向平方试探:
- 自冲突位置起,交替的向前和向后试探。
- 但是正向查找链和逆向查找链可能存在重复的部分,甚至是完全相同的。这主要取决于表长M的不同。
- 素数的分类(除2以外):除以4后余数为1或3。
- 表长取素数
M=4*k+3时,必然可以保证查找链的前M项互异。
- 线性试探:
-
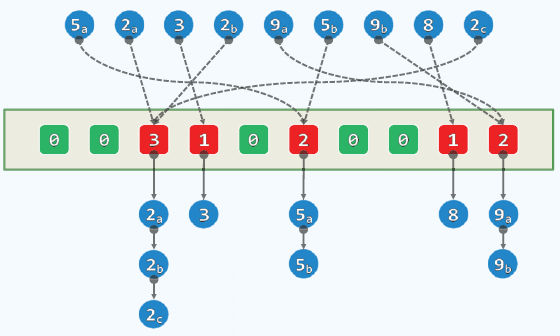
桶排序:
- 设所需要排序的整数数量为n,整数的取值为[0,M)。
- 使用最简单的散列函数,hash(key)=key。将这些整数插入散列表中。如果有重复的,就用独立链法解决。
- 最后顺序遍历散列表,即可得到排序结果。
-
基数排序:
- 针对于关键码由多个字段组成的情况下。
- 根据字段的优先级由低到高按关键码排序,即可得到最终的多字段排序结果。
2、优先级队列
-
循优先级访问:按照队列中数据项的优先级,最高优先级的数据被优先访问。
-
栈和队列也可看作是优先级队列的特例。
-
优先级队列接口:
template <typename T> struct PQ { //优先级队列PQ模板类 virtual void insert ( T ) = 0; //按照比较器确定的优先级次序插入词条 virtual T getMax() = 0; //取出优先级最高的词条 virtual T delMax() = 0; //删除优先级最高的词条 }; -
向量、有序向量、列表和有序列表都无法有效的实现优先级队列(至少一个操作达到O(n))。
-
AVL树、伸展树和红黑树对于三个操作都可达到O(log n)。
-
实际上,如果只需查找极值元素,则不必维护所有元素之间的全序关系,只需要偏序关系。
-
完全二叉堆:
- 在逻辑上等同于完全二叉树;在物理上借助于向量实现。
- 向量中的元素位置与完全二叉树的层次遍历相对应。
- 结构性:对于向量H中的秩i(也是完全二叉树中的关键码),其父亲的秩为
(i-1)>>1,其左孩子的秩为1+(i<<1),其右孩子的秩为(1+i)<<1。 - 堆序性:任何一个节点对应的数值都不会超过其父亲。因此,最大元素必定为根节点,向量中的H[0]。
-
插入与上滤:
-
插入词条e,首先将e作为末元素接入向量。结构性得到自然保持。
-
如果违反了堆序性,只可能是e的值大于其父节点,只需将e与其父亲互换位置。
-
如果仍然违反,只需继续进行该操作,直至到根节点。这就是上滤。
-
如果将这里的值定义为优先级,则可作为优先级队列的实现。
-
实现:
template <typename T> void PQ_ComplHeap<T>::insert ( T e ) { //将词条插入完全二叉堆中 Vector<T>::insert ( e ); //首先将新词条接至向量末尾 percolateUp ( _elem, _size - 1 ); //再对该词条实施上滤调整 } //对向量中的第i个词条实施上滤操作,i < _size template <typename T> Rank percolateUp ( T* A, Rank i ) { while ( 0 < i ) { //在抵达堆顶之前,反复地 Rank j = Parent ( i ); //考查[i]之父亲[j] if ( lt ( A[i], A[j] ) ) break; //一旦父子顺序,上滤旋即完成;否则 swap ( A[i], A[j] ); i = j; //父子换位,并继续考查上一层 } //while return i; //返回上滤最终抵达的位置 }
-
-
删除与下滤:
-
删除向量首元素,代之以末元素e。结构性得到保持,但堆序性可能违背。
-
如果违背堆序性,需要将e与其孩子中的大者交换。如果交换后仍然违背,只需要再次进行交换,直到到达底部。这就是下滤。
-
实现:
template <typename T> T PQ_ComplHeap<T>::delMax() { //删除非空完全二叉堆中优先级最高的词条 T maxElem = _elem[0]; _elem[0] = _elem[ --_size ]; //摘除堆顶(首词条),代之以末词条 percolateDown ( _elem, _size, 0 ); //对新堆顶实施下滤 return maxElem; //返回此前备份的最大词条 } //对向量前n个词条中的第i个实施下滤,i < n template <typename T> Rank percolateDown ( T* A, Rank n, Rank i ) { Rank j; //i及其(至多两个)孩子中,堪为父者 while ( i != ( j = ProperParent ( A, n, i ) ) ) //只要i非j,则 { swap ( A[i], A[j] ); i = j; } //二者换位,并继续考查下降后的i return i; //返回下滤抵达的位置(亦i亦j) } #define Bigger(PQ, i, j) ( lt( PQ[i], PQ[j] ) ? j : i ) //取大者(等时前者优先) #define ProperParent(PQ, n, i) /*父子(至多)三者中的大者*/ ( RChildValid(n, i) ? Bigger( PQ, Bigger( PQ, i, LChild(i) ), RChild(i) ) : ( LChildValid(n, i) ? Bigger( PQ, i, LChild(i) ) : i ) ) //相等时父节点优先,如此可避免不必要的交换 -
上滤与下滤的区别主要在于,在进行比较时,上滤只需与其父亲比较,而下滤需要与其两个孩子比较。
-
-
批量建堆:
-
根据一个输入向量快速建立完全二叉堆。
-
暴力算法:经过上滤插入各个节点。即自上而下的上滤。时间复杂度O(nlog n)。
-
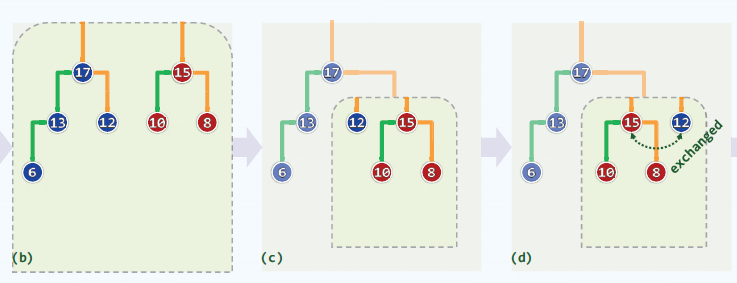
改进算法:自下而上的下滤。
- 如果需要将两个高度相同的堆用一个根节点合并为一个堆。
- 只需要对两个堆中,对除叶节点外的内部节点,从下而上进行下滤。最后对根节点进行下滤。
- 将刚开始的每个叶子节点都看做是一个堆,逐层向上完成堆的合并,即可完成建堆。
-
实现:
template <typename T> void heapify ( T* A, const Rank n ) { //Floyd建堆算法,O(n)时间 for ( int i = n/2 - 1; 0 <= i; i-- ) //自底而上,依次 /*DSA*///{ percolateDown ( A, n, i ); //下滤各内部节点 -
时间复杂度O(n)。造成差异的在于,改进算法所需时间正比于节点的高度,而暴力算法所需时间正比于节点的深度。
-
-
堆排序:
-
与选择排序类似,选取未排序元素中的最大者。只不过是用二叉堆来实现。
-
建堆操作需要O(n),而每次删除最大元素需要O(log n)。则删除堆中的所有元素,时间复杂度O(nlog n)。
-
对于空间复杂度,堆排序可以实现就地排序。排序好的向量与实现堆结构的向量在一块连续的空间中。
-
实现:
template <typename T> void Vector<T>::heapSort(Rank lo,Rank hi){ PO_ComplHeap<T> H(_elem+lo,hi-lo);//建堆 while(!H.empty()) //反复摘除最大元并归入已排序的后缀 _elem[--hi]=H.delMax(); //堆顶与末元素对换后下滤 }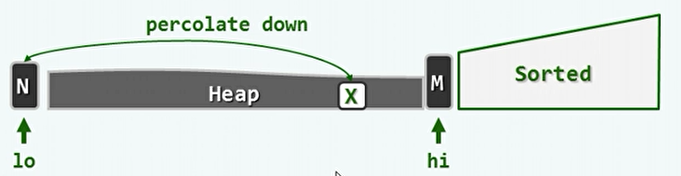
-
-
左式堆:
- 动机:为了有效的完成堆合并。
- 单侧倾斜:
- 在保持堆序性的情况下,附加新条件。使得在堆合并过程中,只需调整很小的节点。
- 新条件:节点分布偏向于左侧,合并操作只涉及右侧。
- 在这种情况下,拓扑结构不再是完全二叉树。
- 引入外部节点,让所有的内部节点的度数都为2,成为真二叉树。
- 空节点路径长度NPL:
- 外部节点的NPL为0。
- 内部节点的NPL=1+min(NPL(左孩子),NPL(右孩子))。
- x的NPL值是x到外部节点的最近距离;也是以x为根的最大满子树的高度(包括外部节点)。
- 左倾:
- 对于任何内节点x,都有左孩子的NPL值大于等于右孩子。
- 推理:该点的NPL值等于1+右孩子的NPL值。
- 左倾性与堆序性是相容的。
- 左式堆的子堆,必是左式堆。
- 但是,左子堆的规模和高度未必大于右子堆。
- 右侧链:
- 从根节点出发,一直沿右分支前进所遍历的分支。
- 右侧链的终点,必为全堆中最浅的外部节点。也即存在一棵以r为根,高度为d的满子树。
- 右侧链长为d的左式堆,至少包含2^d-1个内部节点。
- 对于包含n个节点的左式堆,右侧链的长度不超过O(log n)。
-
左式堆的合并:
-
两个堆合并,将根节点较大的称为a,将根节点较小的称为b。
-
将a的右子堆与b进行合并,结果作为a的右子堆,并递归的进行之前的步骤。
-
当达到根节点时,比较左右子堆的NPL值,保证左子堆大于等于右子堆,否则交换左右。
-
实现:
template <typename T> //根据相对优先级确定适宜的方式,合并以a和b为根节点的两个左式堆 static BinNodePosi(T) merge ( BinNodePosi(T) a, BinNodePosi(T) b ) { if ( ! a ) return b; //退化情况 if ( ! b ) return a; //退化情况 if ( lt ( a->data, b->data ) ) swap ( a, b ); //一般情况:首先确保b不大 ( a->rc = merge ( a->rc, b ) )->parent = a; //将a的右子堆,与b合并 if ( !a->lc || a->lc->npl < a->rc->npl ) //若有必要 swap ( a->lc, a->rc ); //交换a的左、右子堆,以确保右子堆的npl不大 a->npl = a->rc ? a->rc->npl + 1 : 1; //更新a的npl return a; //返回合并后的堆顶 }
-
-
插入与删除:
-
插入操作就是将原堆与所要插入的节点合并即可。
template <typename T> void PQ_LeftHeap<T>::insert ( T e ) { _root = merge( _root, new BinNode<T>( e, NULL ) ); //将e封装为左式堆,与当前左式堆合并 _size++; //更新规模 } -
删除操作就是将原堆的左子堆和右子堆合并。
template <typename T> T PQ_LeftHeap<T>::delMax() { BinNodePosi(T) lHeap = _root->lc; if (lHeap) lHeap->parent = NULL; //左子堆 BinNodePosi(T) rHeap = _root->rc; if (rHeap) rHeap->parent = NULL; //右子堆 T e = _root->data; delete _root; _size--; //删除根节点 _root = merge ( lHeap, rHeap ); //合并原左、右子堆 return e; //返回原根节点的数据项 }
-
iwehdio的博客园:https://www.cnblogs.com/iwehdio/