除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更敏感。Harris算法是图像检测识别算法中非常重要的一个算法,其对物体姿态变化鲁棒性好,对旋转不敏感,可以很好的检测出物体的角点。甚至对于标定算法而言,HARRIS角点检测是使之能成功进行的基础。
HARRIS算法的思想还是很有意思的。很聪明也很trick.
1.Harris 算法
其思想及数学推导大致如下:
1.在图像中取一个窗 w (矩形窗,高斯窗,XX窗,各种窗,某师姐要改标定算法不就可以从选Harris的窗开始做起么。。。。。)
2.获得在该窗下的灰度 I
3.移动该窗,则灰度会发生变化,平坦区域灰度变化不大,边缘区域沿边缘方向灰度变化剧烈,角点处各个方向灰度变化均剧烈
4.依据3中条件选出角点
当然啦,如果Harris算子的实现也和它的思想这么平淡那我就不表扬他聪明了,Harris算子的具体实现方法,利用的是图像偏微分方程的思想。
先给出抽象数学表达式(不要问我为什么这么淡,我也不知道):

其中 w 代表窗函数,某个x,y为图像坐标,u,v是一个移动向量(既反应移动方向,也反应移动大小)。

Ix表示图像沿x方向的差分,Iy表示图像沿y方向的差分。图像差分算子有什么Sober~PXX~总之很多就对了,一阶差分还是很好求的。

显然,E(u,v)可以用另外一种形式来表示了。最终可以表达为协方差矩阵的形式。

OK,在这里我们有了数学中最优雅的表达——Matrix,especially symmetric Matrix. Nothing is better than that.


2.矩阵的方向性
显然,E(u,v)的值和u,v有关。。。很有关。。
1.可以取一组u,v,让E(u,v)的值最小。
2.还可以取一组u,v,让E(u,v)的值最大。
这些u,v怎么取,显然就和矩阵M的方向有关了。OK,让我们换一个思路来看这个矩阵。
平面内的一个矩阵乘以一个向量v,大概简单的写成 Mv
它会使得这个向量发生一个作用:旋转,拉伸,平移.....总之,这种作用叫做 线性变换
矩阵的左边好像也是一个向量,只不过是横着写的([u v]),换而言之,那就是 vT(v的转置)。
vT(Mv)......这是啥?
意思好像是。。。。v先旋转+拉伸一下,然后再在它自己身上投影,最终的 E(u,v)本质上来说,就是这个投影的长度。。。嗯,对,投影的长度
好了。我们现在明确了 E(u,v) 的数学几何意义,再回过头来想想,要怎样才能让这个投影的长度达到最大或者最小呢?
显然,答案就是矩阵的特征值与特征向量,当[u v]T 取特征向量方向的时候,矩阵M只有拉伸作用,而没有旋转作用,这时的投影长度是最长的(如果反向投则是负的最长)。
到此为止,我们已经知道了 E(u,v)的最大和最小值了(笨办法是求出特征向量方向再带进去,聪明的方法是直接看矩阵特征值,特征值就是放大倍数)。并且,分析可以知道,特征值越大,那么说明 E(u,v)越大。
1.两个特征值都很大==========>角点(两个响应方向)
2.一个特征值很大,一个很小=====>边缘(只有一个响应方向)
3.两个特征值都小============>平原地区(响应都很微弱)
基于上述特征,有很多人设计了角点的快速判据。
有 det(M) - trace(M)^2
有 det(M)/trace(M)
.....等等很多,但是这不重要,思想都是一样的。(某师姐这里又有一个标定算法的创新点哦。。。。我会告诉你换换判据又是个新思路?)
3. 3DHarris
在2DHarris里,我们使用了 图像梯度构成的 协方差矩阵。 图像梯度。。。嗯。。。。每个像素点都有一个梯度,在一阶信息量的情况下描述了两个相邻像素的关系。显然这个思想可以轻易的移植到点云上来。
OOPS,糟糕,点云木有灰度的概念啊,一般的点云也木有强度的概念啊。。。这可如何是好??????
别紧张,pcl 说这样能行,那就肯定能行咯,先定性的分析一下Harris3D的理念。
想象一下,如果在 点云中存在一点p
1、在p上建立一个局部坐标系:z方向是法线方向,x,y方向和z垂直。
2、在p上建立一个小正方体,不要太大,大概像材料力学分析应力那种就行
3、假设点云的密度是相同的,点云是一层蒙皮,不是实心的。
a、如果小正方体沿z方向移动,那小正方体里的点云数量应该不变
b、如果小正方体位于边缘上,则沿边缘移动,点云数量几乎不变,沿垂直边缘方向移动,点云数量改变
c、如果小正方体位于角点上,则有两个方向都会大幅改变点云数量
OK,我们已经有了Harris3D的基本准则,接下来要思考的是怎样优雅的解决这个问题
两个和z相互垂直的方向。。。。嗯。。。。perpendicular。。。。
如果由法向量x,y,z构成协方差矩阵,那么它应该是一个对称矩阵。而且特征向量有一个方向是法线方向,另外两个方向和法线垂直。
那么直接用协方差矩阵替换掉图像里的M矩阵,就得到了点云的Harris算法。
其中,半径r可以用来控制角点的规模
r小,则对应的角点越尖锐(对噪声更敏感)
r大,则可能在平缓的区域也检测出角点
r怎么取? 我也不知道。。。。。试吧。。。。。
4.PCL对Harris算法的实现
根据以上分析,在PCL的API文档的帮助下,我尝试了一下 Harris3D 算法。感谢山大的毕同学提供的点云,该点云是场景点云而不是一般的物体点云。总体感觉是慢,因为针对每个点云,需要计算它的法线,算完之后又要针对每个点进行协方差矩阵的计算,总而言之,整个过程还是非常耗时的。并且说实话。。。算法的效果一般般。
#include <iostream> #include <pcliopcd_io.h> #include <pcl/point_cloud.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/io/io.h> #include <pcl/keypoints/harris_keypoint3D.h> #include <cstdlib> #include <vector> using namespace std; int main() { pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); pcl::io::loadPCDFile ("F:\PCL\PCD\both.pcd", *cloud); boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer); viewer->addPointCloud(cloud,"all_cloud"); //注意Harris的输出点云必须是有强度(I)信息的,因为评估值保存在I分量里 pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZI>); pcl::HarrisKeypoint3D<pcl::PointXYZ,pcl::PointXYZI,pcl::Normal> harris; harris.setInputCloud(cloud); cout<<"input successful"<<endl; harris.setNonMaxSupression(true); harris.setRadius(0.04f); harris.setThreshold(0.02f); cout<<"parameter set successful"<<endl; //新建的点云必须初始化,清零,否则指针会越界 cloud_out->height=1; cloud_out->width =100; cloud_out->resize(cloud_out->height*cloud->width); cloud_out->clear(); harris.compute(*cloud_out); int size = cloud_out->size(); pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_harris (new pcl::PointCloud<pcl::PointXYZ>); cloud_harris->height=1; cloud_harris->width =100; cloud_harris->resize(cloud_out->height*cloud->width); cloud_harris->clear(); pcl::PointXYZ point; //可视化结果不支持XYZI格式点云,所有又要导回XYZ格式。。。。 for (int i = 0;i<size;i++) { point.x = cloud_out->at(i).x; point.y = cloud_out->at(i).y; point.z = cloud_out->at(i).z; cloud_harris->push_back(point); } pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> harris_color_handler (cloud_harris, 0, 255, 0); viewer->addPointCloud(cloud_harris,harris_color_handler,"harris"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "harris"); while (!viewer->wasStopped()) { viewer->spinOnce(100); } system("pause"); }
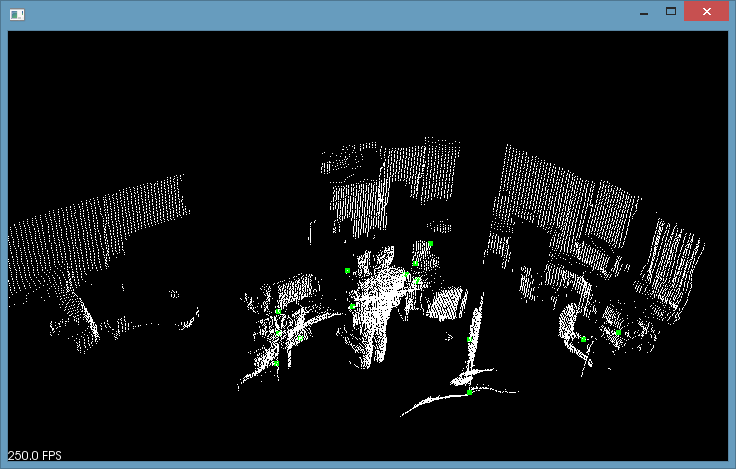
由于我选择的搜索半径比较大,所以找到的角点都不是太"角”,关于参数设置大家可以多多探索,但我认为,特征点检测算法实在太慢,对实时机器人系统来说是远远达不到要求的。这种先算法线,再算协方差的形式真心上不起。。。。实际上这种基于领域法线的特征点检测算法有点类似基于 CRF的语义识别算法,都只使用了相邻信息而忽略了全局信息。也可能相邻信息包含的相关性比较大,是通往高层次感知的唯一路径吧,谁又知道呢?
任重而道远。。。。。