1.任务相关的API函数
函数存在于task.c中,主要的函数有:
- xTaskCreate():使用动态的方法创建一个任务;
- xTaskCreatStatic():使用静态的方法创建一个任务(用的非常少);
- xTaskCreateRestricted():创建一个使用MPU进行限制的任务;
- vTaskDelete():删除一个任务;
- vTaskSuspend():挂起一个任务;
- vTaskResume():恢复一个任务的运行;
- vTaskResumeFromISR():中断服务函数中恢复一个任务的运行;
- portENABLE_INTERRUPTS():打开FreeRTOS中断;
- portDISABLE_INTERRUPTS():关闭freeRTOS中断;
2.动态创建任务
- xTaskCreate()函数原型:
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode, const char * const pcName, uint16_t usStackDepth, void *pvParameters, UBaseType_t uxPriority, TaskHandle_t *pvCreatedTask );
- 动态创建任务:使用前先判断 #if( configSUPPORT_STATIC_ALLOCATION == 1 ) 是否成立,如果不成立需要在FreeRTOSConfig.h 文件中添加;
#include "FreeRTOS.h" #include "task.h" //start_task 任务 void start_task(void *pvParameters); // 任务函数 #define start_task_zise 50 // 任务堆栈的大小 #define start_task_prio 1 // 任务优先级 TaskHandle_t start_task_handler; // 任务句柄 //led1_task 任务 void led1_task(void *pvParameters); // 任务函数 #define led1_task_zise 50 // 任务堆栈的大小 #define led1_task_prio 2 // 任务优先级 TaskHandle_t led1_task_handler; // 任务句柄
int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); uart_init(115200); delay_init(); LED_Init(); // 创建一个任务 xTaskCreate(任务函数, 任务名, 任务堆栈的大小, 传递给任务函数的参数, 任务优先级, 任务句柄); xTaskCreate( start_task, "start_stask", start_task_zise, NULL, start_task_prio, &start_task_handler); vTaskStartScheduler(); // 开启任务调度 return 0; } void start_task( void * pvParameters ) { taskENTER_CRITICAL(); // 创建临界区 // 创建led1任务 xTaskCreate(led1_task, "led1_task", start_task_zise, NULL, led1_task_prio, &led1_task_handler); vTaskDelete(start_task_handler); //删除开始任务 taskEXIT_CRITICAL(); // 退出临界区 } //LED1任务函数 void led1_task( void * pvParameters ) { for( ;; ) { LED0 = ~LED0; vTaskDelay(1000); } }
3.静态创建任务
- xTaskCreatStatic()函数原型:
TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode, const char * const pcName, const uint32_t ulStackDepth, void * const pvParameters, UBaseType_t uxPriority, StackType_t * const puxStackBuffer, StaticTask_t * const pxTaskBuffer )
- 静态创建任务:使用前先判断 #if( configSUPPORT_STATIC_ALLOCATION== 1 ) 是否成立,如果不成立需要在FreeRTOSConfig.h 文件中添加;
- 在FreeRTOSConfig.h 文件中添加中添加宏后,编译报错:
.ObjectsfreeRTOS_sCreate_task.axf: Error: L6218E: Undefined symbol vApplicationGetIdleTaskMemory(referred from tasks.o). .ObjectsfreeRTOS_sCreate_task.axf: Error: L6218E: Undefined symbol vApplicationGetTimerTaskMemory (referred from timers.o).
- 由于把静态创建的宏给打开了,所以这两个数需要我们自己去实现
// 空闲任务 static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE]; static StaticTask_t IdleTaskTCB; // 定时器任务 static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH]; static StaticTask_t TimerTaskTCB; // 空闲任务所需内存 void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize ) { *ppxIdleTaskTCBBuffer = &IdleTaskTCB; *ppxIdleTaskStackBuffer = IdleTaskStack; *pulIdleTaskStackSize = configMINIMAL_STACK_SIZE; } // 定时器任务所需内存 void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize ) { *ppxTimerTaskTCBBuffer = &TimerTaskTCB; *ppxTimerTaskStackBuffer = TimerTaskStack; *pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH; }
- 静态创建任务
//start_task 任务 void start_task(void *pvParameters); // 任务函数 #define start_task_zise 50 // 任务堆栈的大小 #define start_task_prio 1 // 任务优先级 StackType_t start_task_stack[start_task_zise]; // 任务控制块大小 StaticTask_t start_task_TCB; // 任务堆栈大小 TaskHandle_t start_task_handler; // 任务句柄 //led1_task 任务 void led1_task(void *pvParameters); // 任务函数 #define led1_task_zise 50 // 任务堆栈的大小 #define led1_task_prio 2 // 任务优先级 StackType_t led1_task_stack[start_task_zise]; // 任务控制块大小 StaticTask_t led1_task_TCB; // 任务堆栈大小 TaskHandle_t led1_task_handler; // 任务句柄 //led2_task 任务 void led2_task(void *pvParameters); // 任务函数 #define led2_task_zise 50 // 任务堆栈的大小 #define led2_task_prio 3 // 任务优先级 StackType_t led2_task_stack[start_task_zise]; // 任务控制块大小 StaticTask_t led2_task_TCB; // 任务堆栈大小 TaskHandle_t led2_task_handler; // 任务句柄 int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); uart_init(115200); delay_init(); LED_Init(); // 创建一个开始任务 start_task_handler = xTaskCreateStatic( (TaskFunction_t )start_task, (char *)"start_task", (uint32_t )start_task_zise, (void * )NULL, (UBaseType_t )start_task_prio, (StackType_t * )start_task_stack, // 任务控制块大小 (StaticTask_t * )&start_task_TCB ); // 任务堆栈大小 vTaskStartScheduler(); // 开启任务调度 return 0; } void start_task( void * pvParameters ) { led1_task_handler = xTaskCreateStatic( (TaskFunction_t )led1_task, (char *)"led1_task", (uint32_t )led1_task_zise, (void * )NULL, (UBaseType_t )led1_task_prio, (StackType_t * )led1_task_stack, // 任务控制块大小 (StaticTask_t * )&led1_task_TCB ); // 任务堆栈大小 led2_task_handler = xTaskCreateStatic( (TaskFunction_t )led2_task, (char *)"led2_task", (uint32_t )led2_task_zise, (void * )NULL, (UBaseType_t )led2_task_prio, (StackType_t * )led2_task_stack, // 任务控制块大小 (StaticTask_t * )&led2_task_TCB ); // 任务堆栈大小 vTaskDelete(start_task_handler); } void led1_task( void * pvParameters ) { for( ;; ) { LED0 = ~LED0; vTaskDelay(200); } } void led2_task( void * pvParameters ) { for( ;; ) { LED1 = ~LED1; vTaskDelay(1000); } }
4.删除任务
- void vTaskDelete( TaskHandle_t xTaskToDelete ) PRIVILEGED_FUNCTION;
5.任务挂起
- void vTaskSuspend( TaskHandle_t xTaskToSuspend ) PRIVILEGED_FUNCTION;
6.任务恢复
- void vTaskResume( TaskHandle_t xTaskToResume ) PRIVILEGED_FUNCTION;
- 挂起、恢复代码如下:
//key_task 任务 void key_task(void *pvParameters); // 任务函数 #define key_task_zise 50 // 任务堆栈的大小 #define key_task_prio 4 // 任务优先级 TaskHandle_t key_task_handler; // 任务句柄 void start_task( void * pvParameters ) { taskENTER_CRITICAL(); // 创建临界区 // 创建按键检查任务 xTaskCreate((TaskFunction_t )key_task, (const char * )"key_task", (uint16_t )key_task_zise, (void * )NULL, (UBaseType_t )key_task_prio, (TaskHandle_t * )&key_task_handler); ...... vTaskDelete(start_task_handler); //删除开始任务 taskEXIT_CRITICAL(); // 退出临界区 } //key任务函数 void key_task( void * pvParameters ) { char key; for( ;; ) { key = KEY_Scan(0); switch(key) { case KEY0_PRES: vTaskSuspend(led1_task_handler); printf("led1_task Suspended. "); break; case KEY1_PRES: vTaskResume(led1_task_handler); printf("led1_task Resumed. "); break; case KEY2_PRES: vTaskSuspend(led2_task_handler); printf("led2_task Suspended. "); break; case WKUP_PRES: vTaskResume(led2_task_handler); printf("led2_task Resumed. "); break; } vTaskDelay(10); //延时10ms } }
7.FreeRTOS开关中断
- freeRTOS管理的中断优先级为 5~15,这是在freeRTOSConfig.h中设置的。
#ifdef __NVIC_PRIO_BITS #define configPRIO_BITS __NVIC_PRIO_BITS #else #define configPRIO_BITS 4 #endif #define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 //中断最低优先级 #define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 //系统可管理的最高中断优先级 #define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) #define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS)
- 设置好宏后,低于configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY优先级的中断可以安全的调用FreeRTOS的API函数(xxFromISR()函数);
- 高于configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY优先级的中断不能被FreeRTOS禁止,中断服务函数也不能调用FreeRTOS的API函数。
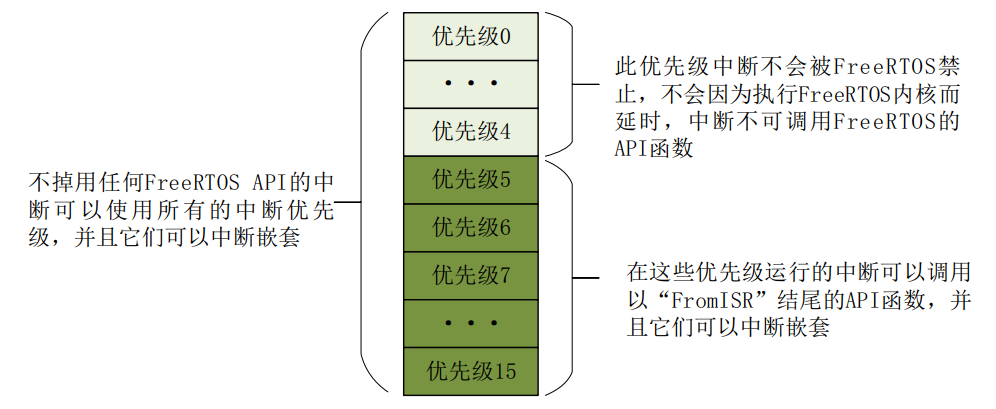
- 由于高于configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY的优先级不会被FreeRTOS内核屏蔽,因此那些对实时性要求严格的任务可以使用这些优先级(0~4),比如四轴飞行器中的避障检测;
//start_task 任务 void start_task(void *pvParameters); // 任务函数 #define start_task_zise 50 // 任务堆栈的大小 #define start_task_prio 1 // 任务优先级 TaskHandle_t start_task_handler; // 任务句柄 //interrupt_task 任务 void interrupt_task(void *pvParameters); // 任务函数 #define interrupt_task_zise 50 // 任务堆栈的大小 #define interrupt_task_prio 2 // 任务优先级 TaskHandle_t interrupt_task_handler; // 任务句柄 int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); uart_init(115200); delay_init(); LED_Init(); TIM3_Int_Init(10000-1,7200-1); //设置定时器3的抢占优先级为 4 TIM5_Int_Init(10000-1,7200-1); //设置定时器5的抢占优先级为 5 // 创建一个任务 xTaskCreate((TaskFunction_t )start_task, // 任务函数 (const char * )"start_stask", // 任务名 (uint16_t )start_task_zise, // 任务堆栈的大小 (void * )NULL, // 传递给任务函数的参数 (UBaseType_t )start_task_prio, // 任务优先级 (TaskHandle_t * )&start_task_handler); // 任务句柄 vTaskStartScheduler(); // 开启任务调度 return 0; } void start_task( void * pvParameters ) { taskENTER_CRITICAL(); // 创建临界区 // 创建led1任务 xTaskCreate((TaskFunction_t )interrupt_task, (const char * )"interrupt_task", (uint16_t )interrupt_task_zise, (void * )NULL, (UBaseType_t )interrupt_task_prio, (TaskHandle_t * )&interrupt_task_handler); // 创建led2任务 vTaskDelete(start_task_handler); //删除开始任务 taskEXIT_CRITICAL(); // 退出临界区 } //interrupt任务函数 void interrupt_task( void * pvParameters ) { int i = 0; for( ;; ) { if(i == 5) { printf("关闭中断!!!. "); portDISABLE_INTERRUPTS(); delay_xms(5000); // delay_xms执行的时候不会执行任何任务调度 printf("开中断!!!. "); portENABLE_INTERRUPTS(); } printf("interrupt task is %d runing. ", i); LED0 = ~LED0; vTaskDelay(1000); i++; } }
8.临界段
- 临界段是指:那些必须完整运行,不能被打断的代码段,比如有的外设的初始化需要严格的时序,初始化过程中不能被打断。FreeRTOS在进入临界段代码的时候需要关闭中断,当处理完临界段代码以后再打开中断。
- FreeRTOS中与临界段有关的函数有4个,定义于task.h中:
#define taskENTER_CRITICAL() portENTER_CRITICAL() #define taskENTER_CRITICAL_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR() #define taskEXIT_CRITICAL() portEXIT_CRITICAL() #define taskEXIT_CRITICAL_FROM_ISR( x ) portCLEAR_INTERRUPT_MASK_FROM_ISR( x )
- taskENTER_CRITICAL():进入任务级的临界区;
- taskEXIT_CRITICAL():退出任务级的临界区;
void start_task( void * pvParameters ) { taskENTER_CRITICAL(); // 进入临界区 // 创建led1任务 xTaskCreate((TaskFunction_t )interrupt_task, (const char * )"interrupt_task", (uint16_t )interrupt_task_zise, (void * )NULL, (UBaseType_t )interrupt_task_prio, (TaskHandle_t * )&interrupt_task_handler); // 创建led2任务 vTaskDelete(start_task_handler); //删除开始任务 taskEXIT_CRITICAL(); // 退出临界区 }
- taskEXIT_CRITICAL_FROM_ISR():进入中断级临界区;
- taskENTER_CRITICAL_FROM_ISR():退出中断级临界区;
//定时器3中断服务程序 void TIM3_IRQHandler(void) //TIM3中断 { int status_value; if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否 { status_value = taskENTER_CRITICAL_FROM_ISR(); //进入临界区 printf("定时器3发生中断. "); LED1=!LED1; TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志 taskEXIT_CRITICAL_FROM_ISR(status_value); //退出临界区 } } //定时器3中断服务程序 void TIM5_IRQHandler(void) //TIM3中断 { int status_value; if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET) //检查TIM5更新中断发生与否 { status_value = taskENTER_CRITICAL_FROM_ISR(); //进入临界区 printf("定时器5发生中断. "); LED1=!LED1; TIM_ClearITPendingBit(TIM5, TIM_IT_Update ); //清除TIMx更新中断标志 taskEXIT_CRITICAL_FROM_ISR(status_value); //退出临界区 } }