看来写博客还是有用的,现在是8月7号,只记得TIM8和TIM1输出PWM比通用定时器多一步,但是现在已经忘记是哪一步了 ,又回来瞅瞅,还好当时有记录
终于搞出来了,高级定时器比通用定时器多一步操作,从原子的例程从TIM3到TIM8改半天,我还以为是一定要复用呢。。。想想也是够傻的。结果是PWM输出没使能。数据手册中TIM8-1比通用定时器多个BDTR寄存器,里面第15位是PWM输出使能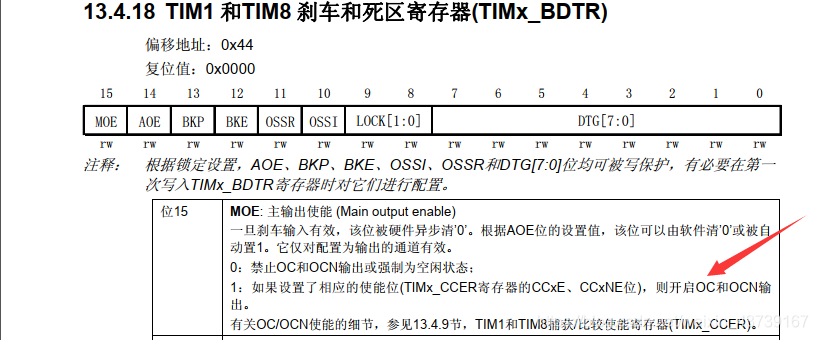
来吧,代码:
配置4路PWM
/*库函数版*/
void TIM8_PWM_Init(u16 arr,u16 psc)
{
u16 CCR1_Val=500;
u16 CCR2_Val=400;
u16 CCR3_Val=300;
u16 CCR4_Val=200;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//设置该引脚为复用输出功能,输出TIM8 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIO
//初始化TIM8
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM8 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=CCR1_Val;
TIM_OC1Init(TIM8, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM8 OC2
TIM_OC1PreloadConfig(TIM8, TIM_OCPreload_Enable); //使能TIM8在CCR2上的预装载寄存器
TIM_CtrlPWMOutputs(TIM8,ENABLE);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=CCR2_Val;
TIM_OC2Init(TIM8, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM8 OC2
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable); //使能TIM8在CCR2上的预装载寄存器
TIM_CtrlPWMOutputs(TIM8,ENABLE);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=CCR3_Val;
TIM_OC3Init(TIM8, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM8 OC2
TIM_OC3PreloadConfig(TIM8, TIM_OCPreload_Enable); //使能TIM8在CCR2上的预装载寄存器
TIM_CtrlPWMOutputs(TIM8,ENABLE);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=CCR4_Val;
TIM_OC4Init(TIM8, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM8 OC2
TIM_OC4PreloadConfig(TIM8, TIM_OCPreload_Enable); //使能TIM8在CCR2上的预装载寄存器
TIM_CtrlPWMOutputs(TIM8,ENABLE);
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}
寄存器的复位值是0x00000000,所以好多地方没有设置,是因为采用的是复位的默认值,比如什么向上计数,输出极性等等
来吧,代码:只配置了CH1,其他的一样
/*寄存器版*/
#include "register.h"
void TIM8_CH1_4_Init(void)
{
/***********开启时钟**********/
RCC->APB2ENR|=(1<<13);//开启TIM8时钟
RCC->APB2ENR|=(1<<4);//GPIOC 时钟使能
/***********开启时钟**********/
/***********初始化GPIO**********/
GPIOC->CRL&=0x00FFFFFF;//清零GPIOC7-6位
GPIOC->CRH&=0xFFFFFF00;//清零GPIOC9-8位
GPIOC->CRL|=0xBBFFFFFF;//配置GPIOC7-6,复用推挽输出,50MHz
GPIOC->CRH|=0xFFFFFFBB;//配置GPIOC8-9,复用推挽输出,50MHz
/***********初始化GPIO**********/
/************************定时器基本设置**************************/
TIM8->ARR=(1000-1);//计数周期
TIM8->PSC=71;//时钟分频系数
/*************************定时器基本设置*************************/
//PWM_CH1配置
TIM8->CCMR1|=7<<4;//输出比较CH1设置为PWM2模式
TIM8->CCMR1|=1<<3;//输出比较CH1预装载使能
TIM8->CCER|=1<<0;//输出模式下,OC1信号输出到对应引脚上
TIM8->CCR1=500;//计数周期为1000,CCR1=500,即占空比为50%
TIM8->CCMR1|=7<<12;//输出比较CH2设置为PWM2模式
TIM8->CCMR1|=1<<11;//输出比较CH2预装载使能
TIM8->CCER|=1<<4;//输出模式下,OC2信号输出到对应引脚上
TIM8->CCR2=500;//计数周期为1000,CCR2=500,即占空比为50%
TIM8->CCMR2|=7<<4;//输出比较CH3设置为PWM2模式
TIM8->CCMR2|=1<<3;//输出比较CH3预装载使能
TIM8->CCER|=1<<8;//输出模式下,OC3信号输出到对应引脚上
TIM8->CCR3=500;//计数周期为1000,CCR3=500,即占空比为50%
TIM8->CCMR2|=7<<12;//输出比较CH4设置为PWM2模式
TIM8->CCMR2|=1<<11;//输出比较CH4预装载使能
TIM8->CCER|=1<<12;//输出模式下,OC4信号输出到对应引脚上
TIM8->CCR4=500;//计数周期为1000,CCR4=500,即占空比为50%
TIM8->BDTR|=1<<15;//主输出使能
TIM8->CR1|=1<<7;//自动重装载允许位使能
TIM8->CR1|=1<<0;//开启定时器8
}