声明:本博客的图片请不要随意引用。如果需要引用,请与博主联系。否则必究法律责任。
1. 前言
目前,我们移动机器人项目较多,目前采用基于3D激光雷达的自动驾驶方案。目前自动驾驶与SLAM核心问题本质上为“定位”,移动机器人与自动驾驶汽车首先需要清楚自己在哪。已有的自动驾驶与SLAM导航方案依赖于地图,即需要在地图上规划路径。因此,目前的定位方案(包括融合定位),最终会映射到地图上。
目前主流的地图构建的主要方案有:
NDT
Cartographer
LOAM系列
LIO-SAM
这里不过多评价各种方法的有缺点,但每种方法都有自己的不足。问题的集中表现为回环效果(地图不闭合),各种地图构建方法都有会有不适应的场景。我们主要采用NDT、LIO-SAM、Cartographer建图方式,当场景过大时,会产生不闭合的效果,这里都是将不闭合的地图采用手动方式调整。但调整效率较低,目前调整一张全长5km的复杂封闭场景需要大约3天左右,导致项目落地时间过长。
基于以上原因,现需要开发相关工具,降低落地时间。
2. 已取得成果
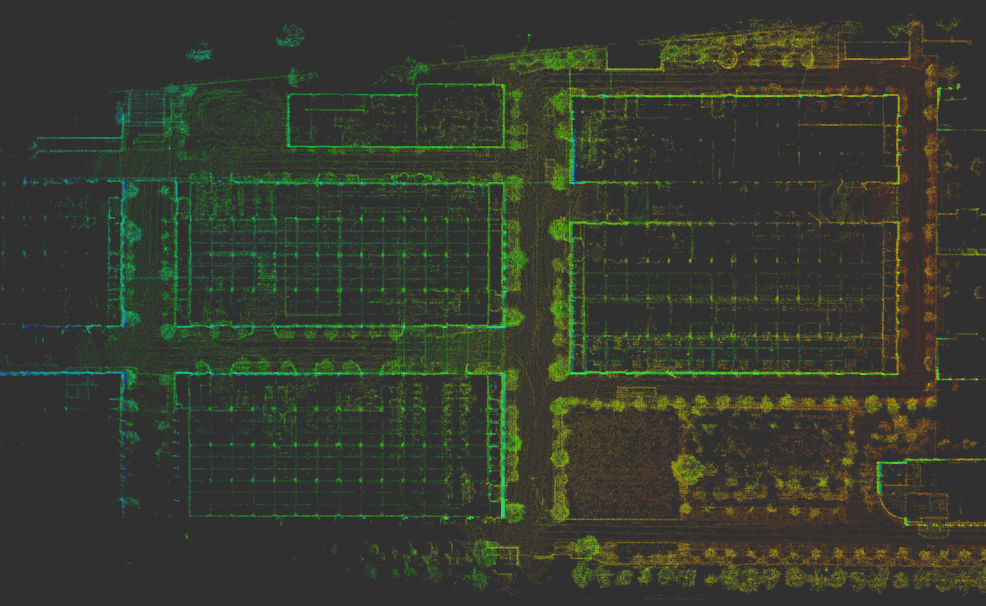
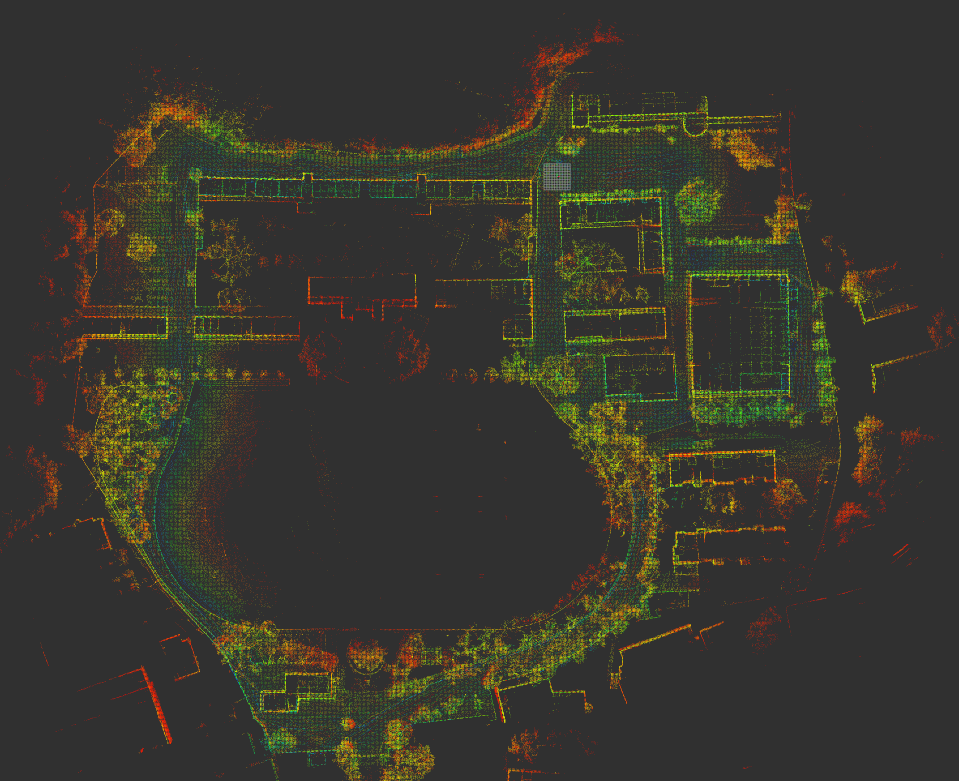
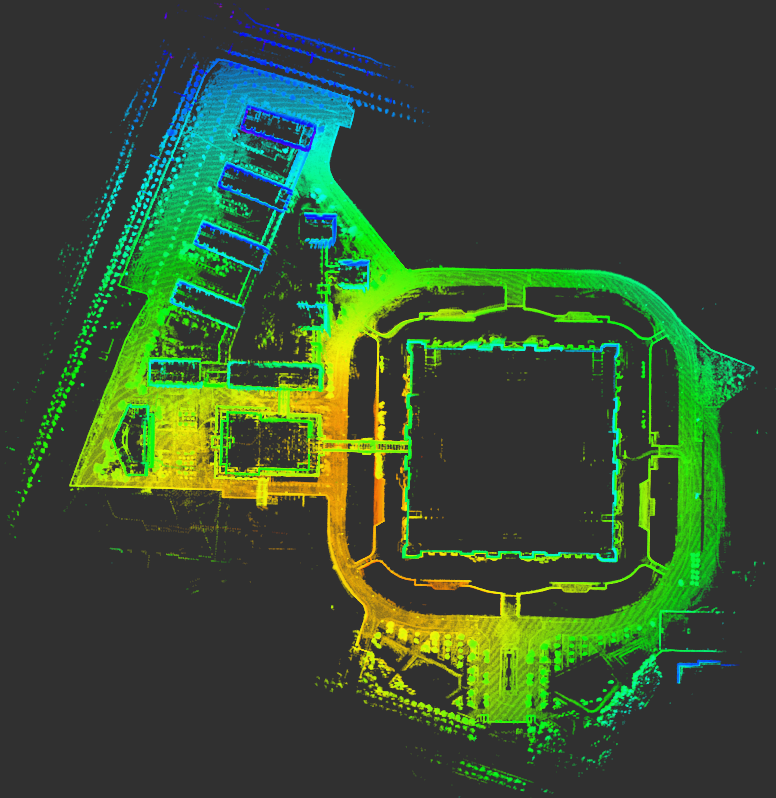
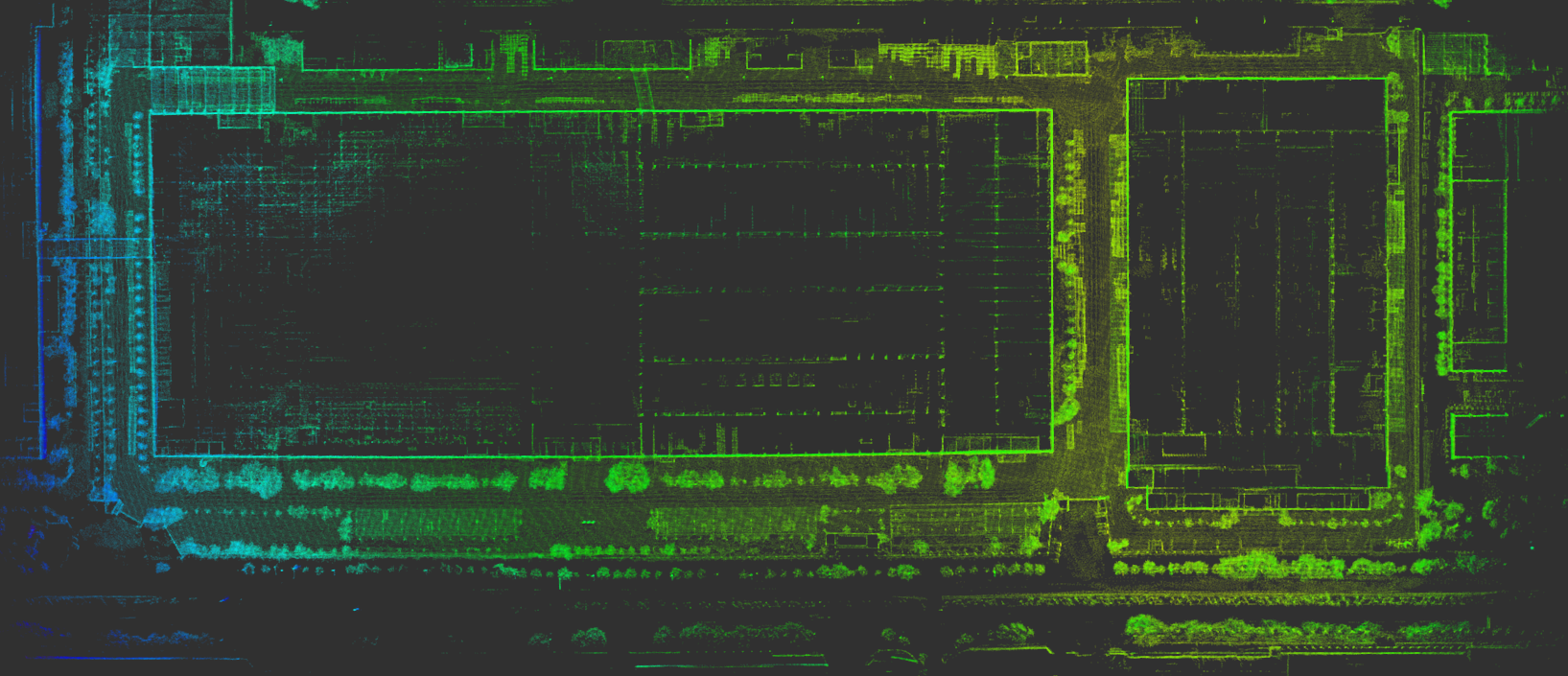
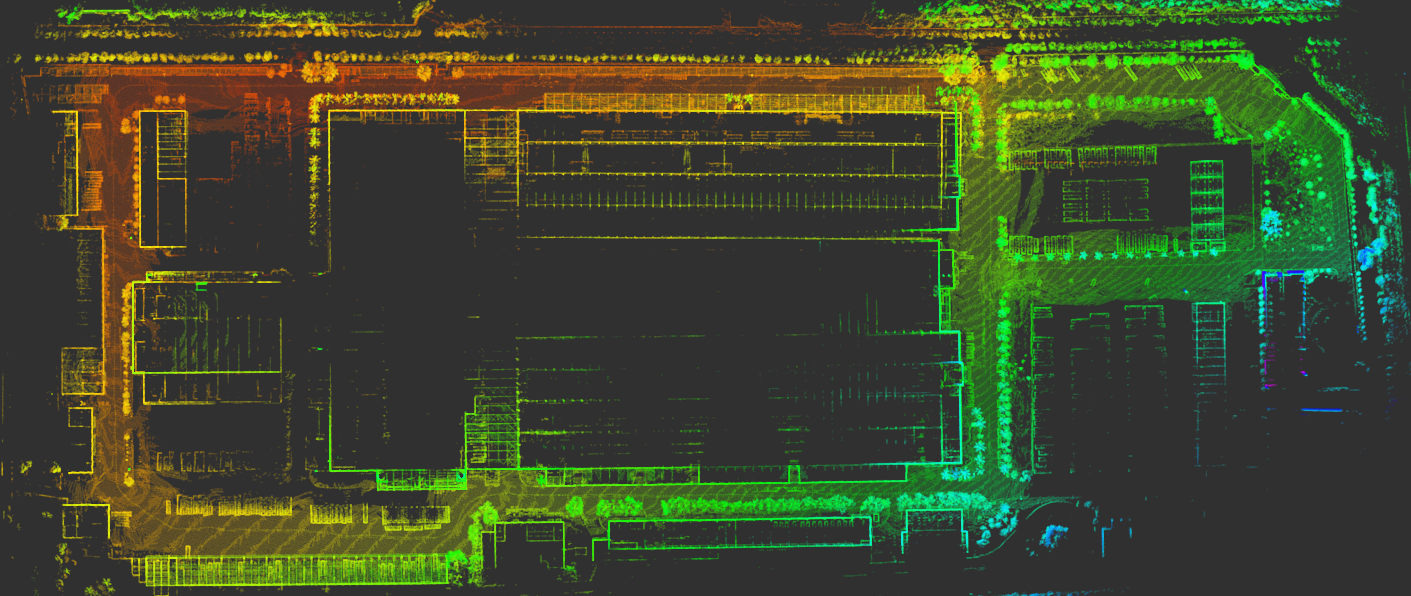
以上场景为我们落地过场景中比较复杂的场景,采用NDT、LIO-SAM、Cartographer等算法构建地图均失败,每个场景需要通过手动调整后使用,上述地图是我们调整后结果。
3. 团队组建
该项目有政府的财政支持,虽然钱不多,但可以保证基本设备采购。同时项目结束时会有现金奖励,目前不能确定金额。参与人员可以远程协助,无需全职参与,需要有一定的SLAM基础,在校生也可以参加。项目结束时,会对项目的实际参与人员分享代码,有兴趣的人可以联系我(微信在我的博客简介),或者在下面留言。