一开始的配置
rcu_periph_clock_enable(RCU_CAN0); rcu_periph_clock_enable(RCU_CAN1); rcu_periph_clock_enable(RCU_GPIOB); rcu_periph_clock_enable(RCU_AF); /* configure CAN0 GPIO */ gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ, GPIO_PIN_11); //CAN0 gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_12); /* configure CAN1 GPIO */ gpio_init(GPIOB,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,GPIO_PIN_5); gpio_init(GPIOB,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_6); gpio_pin_remap_config(GPIO_CAN1_REMAP,ENABLE); nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3); /* configure CAN0 NVIC */ nvic_irq_enable(CAN0_RX0_IRQn, 0, 0); /* configure CAN1 NVIC */ nvic_irq_enable(CAN1_RX0_IRQn,2,0); can_struct_para_init(CAN_INIT_STRUCT, &can_parameter); can_struct_para_init(CAN_INIT_STRUCT, &can_filter); /* initialize CAN register */ can_deinit(CAN0); can_deinit(CAN1); /* initialize CAN parameters */ can_parameter.time_triggered = DISABLE; can_parameter.auto_bus_off_recovery = ENABLE;//DISABLE;允许离线自动恢复 can_parameter.auto_wake_up = DISABLE; can_parameter.no_auto_retrans = DISABLE; can_parameter.rec_fifo_overwrite = DISABLE; can_parameter.trans_fifo_order = DISABLE; can_parameter.working_mode = CAN_NORMAL_MODE; can_parameter.resync_jump_width = CAN_BT_SJW_1TQ; can_parameter.time_segment_1 = CAN_BT_BS1_5TQ; can_parameter.time_segment_2 = CAN_BT_BS2_3TQ; /* 1MBps */ #if CAN_BAUDRATE == 1000 can_parameter.prescaler = 6;// 56M/6/(1+3+5)=1M /* 500KBps */ #elif CAN_BAUDRATE == 500 can_parameter.prescaler = 12; /* 250KBps */ #elif CAN_BAUDRATE == 250 can_parameter.prescaler = 24; /* 125KBps */ #elif CAN_BAUDRATE == 125 can_parameter.prescaler = 48; /* 100KBps */ #elif CAN_BAUDRATE == 100 can_parameter.prescaler = 60; /* 50KBps */ #elif CAN_BAUDRATE == 50 can_parameter.prescaler = 120; /* 20KBps */ #elif CAN_BAUDRATE == 20 can_parameter.prescaler = 300; #else #error "please select list can baudrate in private defines in main.c " #endif /* initialize CAN */ can_init(CAN0, &can_parameter); can_init(CAN1, &can_parameter); /* initialize filter */ can_filter.filter_number=0; can_filter.filter_mode = CAN_FILTERMODE_MASK; can_filter.filter_bits = CAN_FILTERBITS_32BIT; can_filter.filter_list_high = 0x3000; can_filter.filter_list_low = 0x0000; can_filter.filter_mask_high = 0x3000; can_filter.filter_mask_low = 0x0000; can_filter.filter_fifo_number = CAN_FIFO0; can_filter.filter_enable = ENABLE; /* CAN1 filter number */ can_filter.filter_number = 14; can_filter.filter_mode = CAN_FILTERMODE_MASK; can_filter.filter_bits = CAN_FILTERBITS_32BIT; can_filter.filter_list_high = 0x0000; can_filter.filter_list_low = 0x0000; can_filter.filter_mask_high = 0x0000; can_filter.filter_mask_low = 0x0000; can_filter.filter_fifo_number = CAN_FIFO0;//stm32为CAN_FIFO1 can_filter.filter_enable = ENABLE; can_filter_init(&can_filter); can_interrupt_enable(CAN0, CAN_INT_RFNE0);//使能CAN中断 can_interrupt_enable(CAN1, CAN_INT_RFNE0);
发现CAN1中断进入不了。
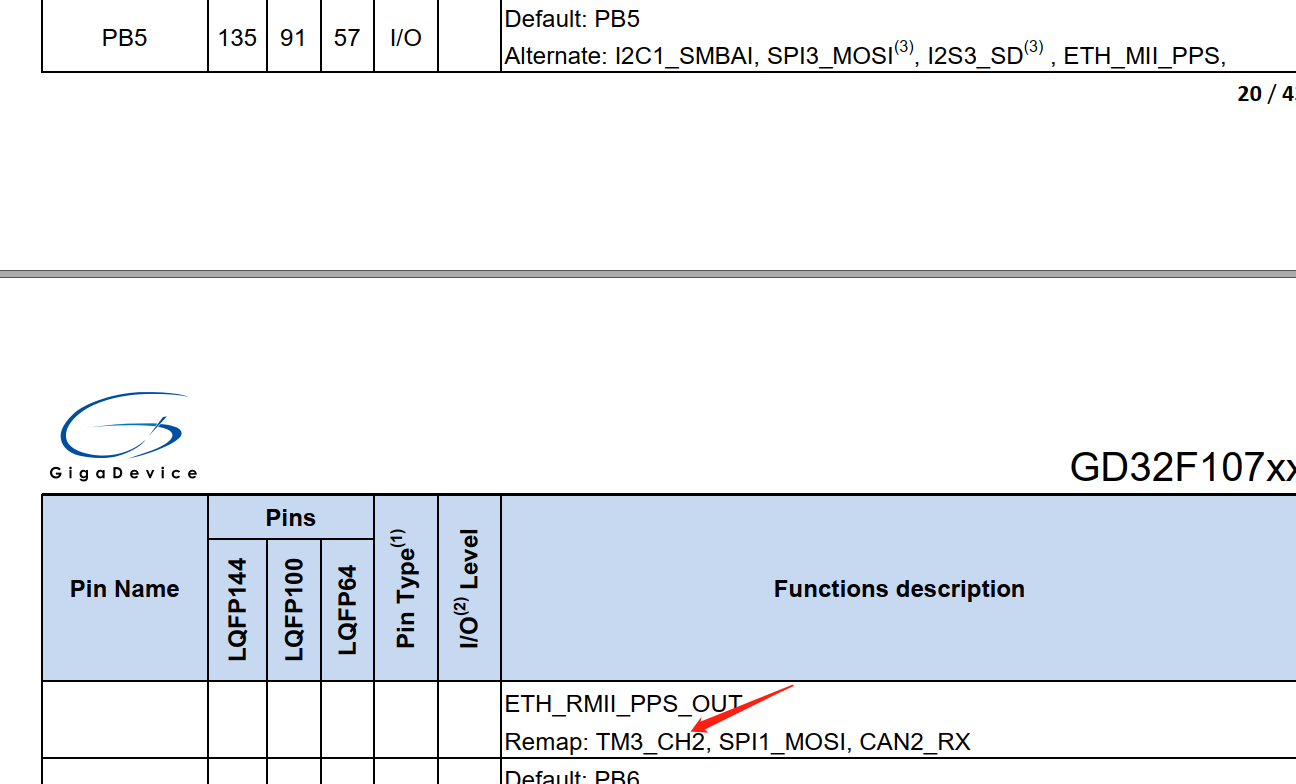
各种折腾都没有。测试硬件,发现CAN_RX和TX的电平都是0,推测是芯片的Can接口没有配置好,但怎么检查都没有发现配置问题。后来在数据手册发现
程序确实在配置CAN后开启的TIM3


void timer3_config(void) { /* ---------------------------------------------------------------------------- TIMER1 Configuration: TIMER1CLK = SystemCoreClock/5400 = 20KHz. TIMER1 configuration is timing mode, and the timing is 0.2s(4000/20000 = 0.2s). CH0 update rate = TIMER1 counter clock/CH0CV = 20000/4000 = 5Hz. ---------------------------------------------------------------------------- */ /* ---------------------------------------------------------------------------- TIMER1 Configuration: TIMER1CLK = SystemCoreClock/135 = 800KHz. TIMER1 configuration is timing mode, and the timing is 0.1ms(80/8000000 = 0.1ms). CH0 update rate = TIMER1 counter clock/CH0CV = 800000/80 = 10KHz. ---------------------------------------------------------------------------- */ timer_oc_parameter_struct timer_ocinitpara; timer_parameter_struct timer_initpara; rcu_periph_clock_enable(RCU_TIMER3); timer_deinit(TIMER3); /* initialize TIMER init parameter struct */ timer_struct_para_init(&timer_initpara); /* TIMER1 configuration */ timer_initpara.prescaler = 134;//5399; timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 80;//4000; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_init(TIMER3, &timer_initpara); /* initialize TIMER channel output parameter struct */ timer_channel_output_struct_para_init(&timer_ocinitpara); /* CH0,CH1 and CH2 configuration in OC timing mode */ timer_ocinitpara.outputstate = TIMER_CCX_ENABLE; timer_ocinitpara.ocpolarity = TIMER_OC_POLARITY_HIGH; timer_ocinitpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW; timer_channel_output_config(TIMER3, TIMER_CH_0, &timer_ocinitpara); /* CH0 configuration in OC timing mode */ timer_channel_output_pulse_value_config(TIMER3, TIMER_CH_0, 40);//2000); timer_channel_output_mode_config(TIMER3, TIMER_CH_0, TIMER_OC_MODE_TIMING); timer_channel_output_shadow_config(TIMER3, TIMER_CH_0, TIMER_OC_SHADOW_DISABLE); timer_interrupt_enable(TIMER3, TIMER_INT_CH0); timer_enable(TIMER3); }
改成
void timer3_config(void) { /* ---------------------------------------------------------------------------- TIMER1 Configuration: TIMER1CLK = SystemCoreClock/5400 = 20KHz. TIMER1 configuration is timing mode, and the timing is 0.2s(4000/20000 = 0.2s). CH0 update rate = TIMER1 counter clock/CH0CV = 20000/4000 = 5Hz. ---------------------------------------------------------------------------- */ /* ---------------------------------------------------------------------------- TIMER1 Configuration: TIMER1CLK = SystemCoreClock/135 = 800KHz. TIMER1 configuration is timing mode, and the timing is 0.1ms(80/8000000 = 0.1ms). CH0 update rate = TIMER1 counter clock/CH0CV = 800000/80 = 10KHz. ---------------------------------------------------------------------------- */ timer_oc_parameter_struct timer_ocinitpara; timer_parameter_struct timer_initpara; rcu_periph_clock_enable(RCU_TIMER3); timer_deinit(TIMER3); /* initialize TIMER init parameter struct */ timer_struct_para_init(&timer_initpara); /* TIMER1 configuration */ timer_initpara.prescaler = 134;//5399; timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 80;//4000; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_init(TIMER3, &timer_initpara); /* initialize TIMER channel output parameter struct */ timer_channel_output_struct_para_init(&timer_ocinitpara); // /* CH0,CH1 and CH2 configuration in OC timing mode */ // timer_ocinitpara.outputstate = TIMER_CCX_ENABLE; // timer_ocinitpara.ocpolarity = TIMER_OC_POLARITY_HIGH; // timer_ocinitpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW; // timer_channel_output_config(TIMER3, TIMER_CH_0, &timer_ocinitpara); // /* CH0 configuration in OC timing mode */ // timer_channel_output_pulse_value_config(TIMER3, TIMER_CH_0, 40);//2000); // timer_channel_output_mode_config(TIMER3, TIMER_CH_0, TIMER_OC_MODE_TIMING); // timer_channel_output_shadow_config(TIMER3, TIMER_CH_0, TIMER_OC_SHADOW_DISABLE); timer_interrupt_enable(TIMER3, TIMER_INT_CH0); timer_enable(TIMER3); }
CAN2中断就可以了!原来,开启TIM3的ch1输出PWM,竟然导致CAN2的remap失效了!!