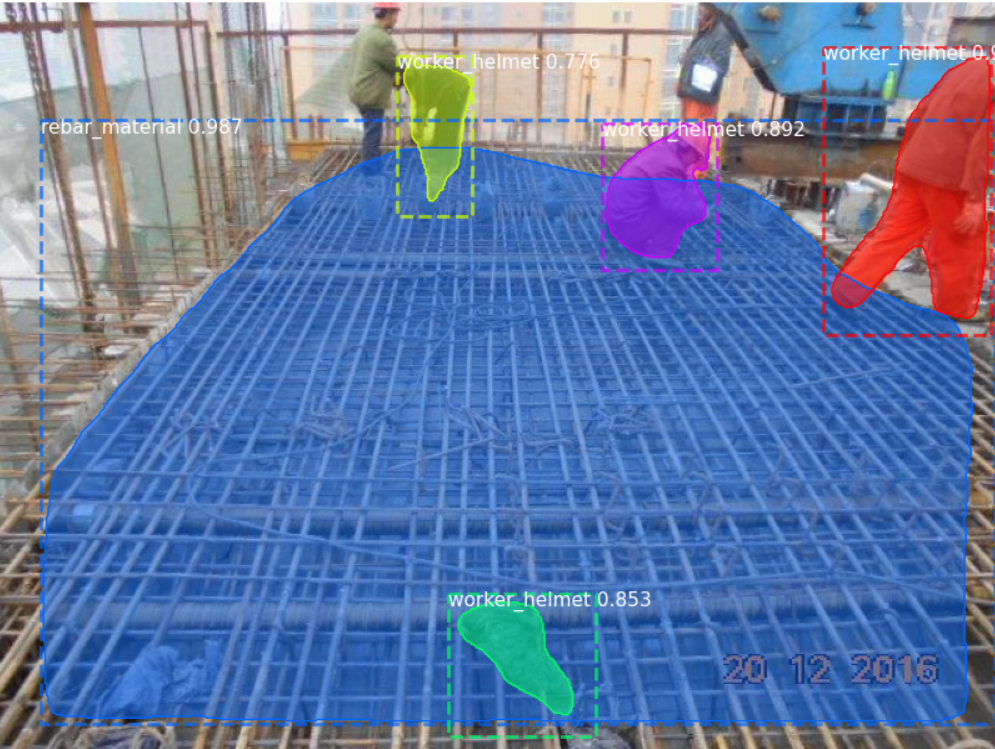
yolov5单图片检测
import argparse import time from pathlib import Path import cv2 import torch import torch.backends.cudnn as cudnn from numpy import random import numpy as np import requests from models.experimental import attempt_load from utils.datasets import LoadStreams,LoadStreams2, LoadImages,LoadWebcam,letterbox from utils.general import check_img_size, check_requirements, non_max_suppression, apply_classifier, scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path from utils.plots import plot_one_box from utils.torch_utils import select_device, load_classifier, time_synchronized device = select_device('') augment = False conf_thres=0.15 iou_thres=0.25 model = attempt_load('yolov5s.pt', map_location=device) img_size = 640 names = model.module.names if hasattr(model, 'module') else model.names colors = [[random.randint(0, 255) for _ in range(3)] for _ in names] def detectionObjectFunction(): #vc = cv2.VideoCapture(2) #rval, frame = vc.read() #rval, cameraImg = vc.read() img_file = requests.get("http://182.61.200.6/pic/20210621/20210621161706340.jpg") cameraImg = cv2.imdecode(np.fromstring(img_file.content, np.uint8), 1) img = letterbox(cameraImg, new_shape=img_size)[0] # Convert img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416 img = np.ascontiguousarray(img) #################################################### img = torch.from_numpy(img).to(device) #img = img.half() if half else img.float() # uint8 to fp16/32 im0 = cameraImg.copy() img = img.half() img = img.float() img /= 255.0 # 0 - 255 to 0.0 - 1.0 if img.ndimension() == 3: img = img.unsqueeze(0) # Inference t1 = time_synchronized() pred = model(img, augment=augment)[0] #pred = model(img, augment=opt.augment)[0] #print('thres:%d '%conf_thres) # Apply NMS pred = non_max_suppression(pred, conf_thres, iou_thres) #def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, labels=()): t2 = time_synchronized() # Apply Classifier # Process detections for i, det in enumerate(pred): # detections per image # batch_size >= 1 #if webcam: # p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count #else: # p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0) # #p = Path(p) # to Path #save_path = str(save_dir / p.name) # img.jpg #txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txt #s += '%gx%g ' % img.shape[2:] # print string # normalization gain whwh #gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] if len(det): # Rescale boxes from img_size to im0 size det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round() # Print results for c in det[:, -1].unique(): n = (det[:, -1] == c).sum() # detections per class #s += f'{n} {names[int(c)]}s, ' # add to string # Write results for *xyxy, conf, cls in reversed(det): label = f'{names[int(cls)]} {conf:.2f}' #plot_one_box2(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=2) #plot_one_box2(xyxy, im0, label=label, color=(0,255,0), line_thickness=2) #plot_one_box(xyxy, im0, label=label, color=(0,255,0), line_thickness=2) plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=2) # Print time (inference + NMS) print(f'detection time. ({t2 - t1:.3f}s)') # Stream results #if view_img: cv2.imshow("win1", im0) cv2.imwrite("2021062112.jpg",im0) #img2 = im0.copy() #################################################### #pass detectionObjectFunction()
################