这篇文章使用的AlexNet网络,在2012年的ImageNet(ILSVRC-2012)竞赛中获得第一名,top-5的测试误差为15.3%,相比于第二名26.2%的误差降低了不少。
本文的创新点:
1) 训练了(当时)最大的一个卷积神经网络,在ImageNet数据集上取得(当时)最好的结果;
2) 写了一个高度优化的GPU实现的2维卷积;
3) 包含了一些新的特点,来提高网络的泛化能力和减少网络的训练时间
4) 使用了一些有效的方法来减轻过拟合;
5) 网络使用了5层卷积层和3层全连接层,如果减少任何一个卷积层,效果将会变差
数据集
使用的数据集为ImageNet数据集。
预处理:将所有图片大小调整为固定分辨率256x256,对于长方形的图片,首先将短边大小调整为256,然后再从中间区域裁剪出256x256大小的图片。
(每张图片)subtracting the mean activity over the training set from each pixel. So we trained our network on the (centered) raw RGB values of the pixels.
当时由于GPU性能的限制,所有使用了两个GPU进行训练。上面的结果比较简略,省略了一些细节。
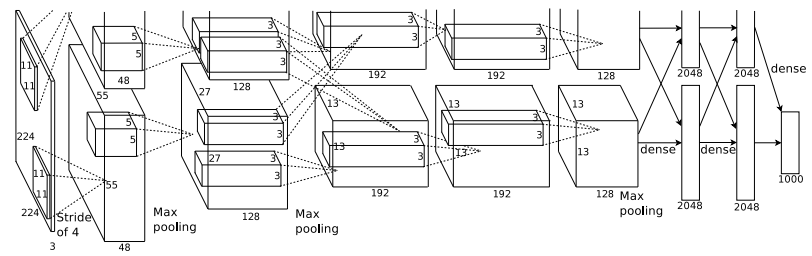
完整的AlexNet网络结构如下:
[227x227x3] INPUT
[55x55x96] CONV1: 96 11x11 filters at stride 4, pad 0 注:(227 - 11)/ 4 + 1 = 55
[55x55x96] RELU1: activation
[27x27x96] MAX POOL1: 3x3 filters at stride 2 注:(55 - 3)/ 2 + 1 = 27
[27x27x96] NORM1: Normalization layer
[27x27x256] CONV2: 256 5x5 filters at stride 1, pad 2 注:(27+2x2-5)/ 1 + 1 = 27
[27x27x256] RELU2: activation
[13x13x256] MAX POOL2: 3x3 filters at stride 2 注:(27-3)/ 2 + 1 = 13
[13x13x256] NORM2: Normalization layer
[13x13x384] CONV3: 384 3x3 filters at stride 1, pad 1 注:(13+1x2-3)/ 1 + 1 = 13
[13x13x384] RELU3: activation
[13x13x384] CONV4: 384 3x3 filters at stride 1, pad 1 注:(13+1x2-3)/ 1 + 1 = 13
[13x13x384] RELU4: activation
[13x13x256] CONV5: 256 3x3 filters at stride 1, pad 1 注:(13+1x2-3)/ 1 + 1 = 13
[13x13x256] RELU5: activation
[6x6x256] MAX POOL3: 3x3 filters at stride 2 注:(13-3)/ 2 + 1 = 6
[4096] FC6: 4096 neurons
[4096] RELU6: activation
[4096] DROPOUT
[4096] FC7: 4096 neurons
[4096] RELU7: activation
[4096] DROPOUT
[1000] FC8: 1000 neurons (class scores)
网络的一些重要的特点
ReLU
ReLU全称为Rectified Linear Units。计算公式为f(x) = max(0, x)。相比于sigmoid和tanh激活函数,ReLU可以加快网络收敛速度,减少训练时间。
Local Response Normalization(局部响应归一化)
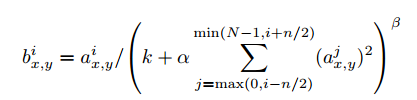
其中a是每一个神经元的激活,即第i个kernel map中(x, y)坐标的值,n是在同一个位置上临近的kernel map的数目,N是kernel的总数目,k,alpha,beta都是预设的一些hyper-parameters,其中k=2,n=5,alpha = 1*e-4,beta = 0.75,这些值都是在验证集上测试得到的。
好处:有利于增加泛化能力,做了平滑处理,识别率提高了1~2%。LRN层模仿生物神经系统的侧抑制机制,对局部神经元的活动创建竞争机制,使得响应比较大的值相对更大,提高模型的泛化能力。
重叠池化
pooling区域为z*z=3*3,间隔距离为s=2.对比z=2,s=2的无重叠方式;使用重叠pooling,不容易过拟合。
减少过拟合
数据增强
第一种方法是,从256x256图像(包括原图像和水平镜像后的图像)中随机地裁剪出224x224的patch,然后对这些224x224的patch送入网络进行训练(这就是网络为什么使用224x224x3作为输入大小的原因)。这种方法可以使得数据增加2048倍。
在测试的时候,将预测的图片(和其水平镜像的图片)上下左右四个角落,中间裁取5x2=10个patch,送入网络进行预测,最后取这10个结果的平均值。
第二种方法是,改变训练图像中RGB通道的强度。对于每个训练图像,我们成倍增加已有主成分,比例大小为对应特征值乘以一个从均值为0,标准差为0.1的高斯分布中提取的随机变量。在训练集像素值的RGB颜色空间进行PCA, 得到RGB空间的3个主方向向量(特征向量),3个特征值, p1, p2, p3, λ1, λ2, λ3. 对每幅图像的每个像素Ixy=[IRxy,IGxy,IBxy]T进行加上如下的变化:
[p1,p2,p3][α1λ1,α2λ2,α3λ3]T
其中,αi是均值为0,标准差为0.1的高斯分布中的一个随机变量。
Dropout
以0.5的概率将每个隐层神经元的输出设置为零。这些被“dropped out”的神经元既不会在前向传播起作用,也不会参与反向传播。因此,每次进行一次输入,整个网络都会改变一次结构,但是这些所有的结构的权值是共享的。由于每个神经元不能依赖其他特定的神经元,因此,会强迫网络学习更加鲁棒的特征。测试的时候,会使用每个神经元,但是会将其权值乘以0.5。
本文只在在第一个全连接层和第二个全连接层使用dropout。
训练细节
使用随机梯度下降法(SGD)进行训练,batch size为128,momentum为0.9,weight decay为0.0005(weight decay很重要,不仅仅是正则化,还可以减少模型训练误差)。
权重w的更新公式为:
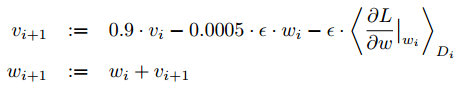
其中,i是迭代次数,v是momentum变量,是学习率, 是第i个batch(称为Di)对w的平均偏导数。
是第i个batch(称为Di)对w的平均偏导数。
每一层的weight初始化方法为:均值为0,标准差为0.01的高斯分布。第2,4,5层的卷积层和3个全连接层的bias初始化都设置为1,其余层的bias初始化为0。这样设置初始化参数可以加速收敛。
对于学习率的设置,每一层的学习率相同,学习率初始化为0.01,后面的时候,当模型在验证集的误差不变时,将当前的学习率除以10,然后再接着训练。我们120万的训练集上训练了90次。