一、使用ros_driver运行VLP16
推荐网址:
http://blog.csdn.net/littlethunder/article/details/51920681
https://www.cnblogs.com/williamc17/p/9705492.html
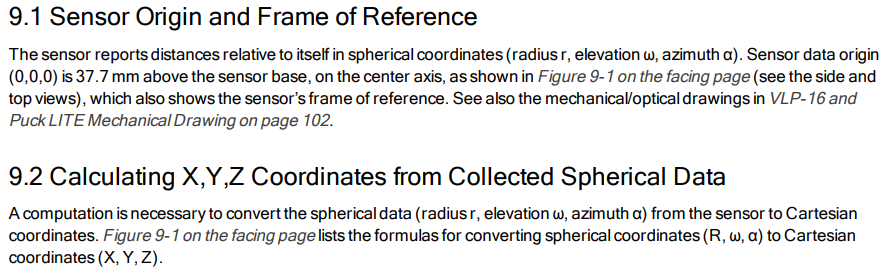
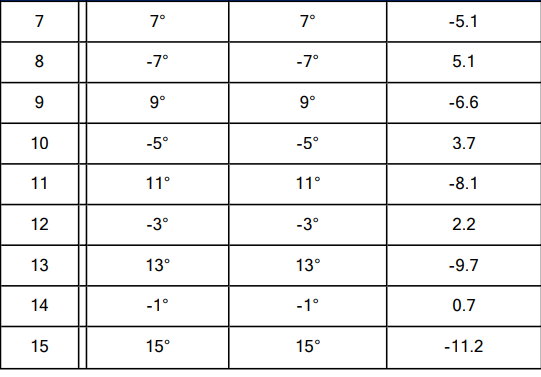
二、源于用户手册的情报


三、ros-driver所使用的坐标系不同于官方用户手册指定的坐标系
为了让所有开发者围绕相同的坐标系开发软件,ros中制定了标准的坐标系定义方案。
详情如以下链接所示:
https://github.com/ros-drivers/velodyne/issues/71
http://www.ros.org/reps/rep-0103.html#axis-orientation
http://www.ros.org/reps/rep-0105.html
四、ros_driver近期的更新
该更新解决两个问题:
a. 可以输出有序的点云; organize_cloud:=true
b. 可以保证每一帧点云的第一个点都来自相同的方位; cut_angle:=6.283185 // 2*pi = 6.283185
roslaunch velodyne_pointcloud VLP16_points.launch cut_angle:=6.283185 organize_cloud:=true calibr:="/home/gordon/ros_ws/src/velodyne/velodyne_pointcloud/VLP16.yaml"
c. 可以设置雷达的采集范围而不会导致单帧点云的点出错,但是这会导致每一帧点云的第一个点来自不同的方位; cut_angle:=5.24 // 5.24 rad = 300 deg
更多问题可以到ros_driver/velodyne的github issue上提问,维护者超nice!