介绍
本指南的目的是大家感兴趣的惯性MEMS(微机电系统)传感器,特别是加速计和陀螺仪和IMU组合设备(惯性测量单元)。
例如IMU单位:Acc_Gyro_6DOF对MCU处理单元UsbThumb提供的USB/串行连接顶部
我会尽力尝试在本文中介绍一些基本而重要的话题:
- 什么是加速度计测量
- 什么是陀螺仪(又名陀螺仪)测量
- 如何转换模数转换(ADC)的读数,你从这些传感器获取物理单位(这些是g,加速度传感器,度/秒陀螺仪)
- 如何结合加速度计和陀螺仪的读数,以获取有关设备相对于你的倾斜度的准确信息,以地平面
在整篇文章中,我会尽量保持数学到最低程度。如果你知道什么是正弦/余弦/正切是,那么你应该能够理解和使用这些想法在你的项目不管是什么平台你正在使用的Arduino ,螺旋桨,基本邮票,爱特梅尔芯片, Microchip的PIC等还有人在那里谁相信你需要复杂的数学才能使用的IMU单元(复数FIR或IIR滤波器,如卡尔曼滤波器,公园,麦克莱伦过滤器等) 。你可以研究所有这些,实现美好的,但复杂的结果。我解释事情的方式所需要的只是基本的数学运算。我在简洁的大信徒。我认为一个系统,是简单更容易控制和监视,除了许多嵌入式设备不具备的权力和资源,以实现复杂的算法要求矩阵的计算。
我会作为一个例子使用我设计了一个新的IMU单位 - Acc_Gyro加速度计+陀螺仪IMU 。我们将在下面我们的例子中使用这个设备的参数。这个单位是一个好设备开始,因为它包含3个设备:
- LIS331AL (数据表) - 模拟3轴加速度2G
- LPR550AL (数据表) - 一个双轴(俯仰和横滚) , 500deg/second陀螺仪
- LY550ALH (数据表) - 一个单轴(偏航)陀螺仪(最后这个设备是不是在本教程中使用,但是当你进入到DCM的矩阵实现它成为有关)
他们一起代表一个6自由度惯性测量单元。现在这是一个奇特的名字!然而,奇特的名字背后,是一个非常有用的组合设备,我们将讨论并在下面详细解释。
第1部分。加速度计
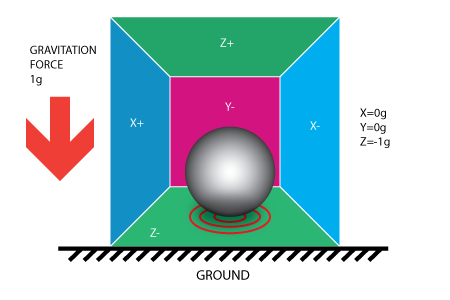
为了理解这个单元我们将开始与加速度计。当考虑加速度计是非常有用的图像框在一个立方体的形状用球里面。你可以想像别的东西像一个cookie或一个甜甜圈,但我会想象一个球:
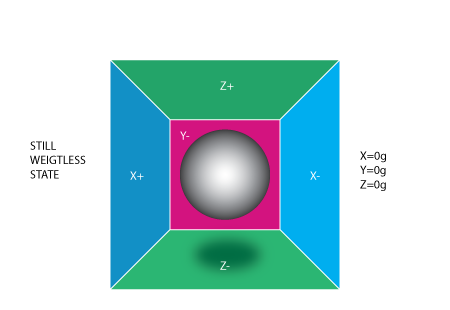
如果我们把这个盒子中,没有引力场或为此事没有任何可能会影响球的位置等领域的地方 - 球会简单地浮在盒子的中间。你能想象的盒子是在外层空间远远离任何天体,或者如果这样的地方是很难找到的想象,至少一个飞船在地球的一切是在失重状态下围绕轨道。从你上面的图片可以看到,我们分配给各轴的一对壁(我们去掉了墙上Y +,所以我们可以看看盒内)。试想一下,每面墙是压力敏感。如果我们突然移动框左侧(我们用加速度1克= 9.8m/s^2的加速度),球会打在墙上的X。然后我们测量压力的力量,球适用于壁和输出的-1G的值在X轴上。
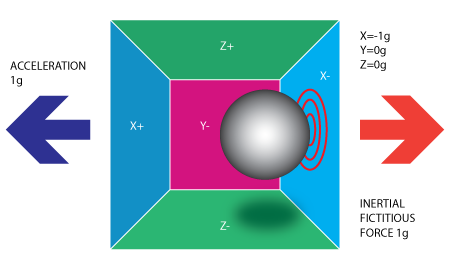
请注意,该加速度传感器将实际检测被引导在从加速度矢量的方向相反的力。这种力量通常被称为惯性力或虚构的力量。有一件事你应该从中学到的是,加速度计测量加速度间接透过应用到它的城墙之一的力(根据我们的模型,它可能是在现实生活中的加速度计弹簧或别的东西)。这支部队可以由加速度引起的,但正如我们将在下一个例子中看到它并不总是引起的加速度。
如果我们把我们的模型,并把它在地球上的球会落在Z-墙上,将适用于为1g力的底壁,如下面的图片: