一、代码
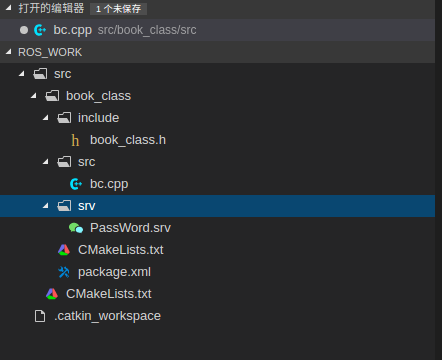
PassWord.srv
int32 password --- bool result
book_class.h
#include "ros/ros.h" #include "std_msgs/String.h" #include "std_msgs/Float64.h" #include "std_msgs/Int32.h" #include "book_class/PassWord.h" #include <cstdlib> using namespace std; class RosBasics { public: RosBasics(); RosBasics(ros::NodeHandle& nh); ~RosBasics(); void initPublish(); void initSubscribe(); void initServer(); bool serverCallback(book_class::PassWord::Request& req, book_class::PassWord::Response& res); void msgCallback(const std_msgs::Float64& stdmsg); void paramTest(); private: ros::NodeHandle nh_; ros::Publisher pub_; ros::Subscriber sub_; ros::ServiceServer serv_; };
bc.cpp
#include "book_class.h" ///////////////////////////////////////////////////////////run////////////////////////udisks2 //////////////////////////////////////////////////////// RosBasics::RosBasics():nh_("~") { initPublish(); initServer(); initSubscribe(); paramTest(); } RosBasics::RosBasics(ros::NodeHandle& nh):nh_(nh) { initPublish(); initServer(); initSubscribe(); paramTest(); } RosBasics::~RosBasics() { } /** 定义主题: "Topic2" 消息类型:std_msgs::Float64 发布端 */ void RosBasics::initPublish() { ROS_INFO("publish initializing!"); pub_ = nh_.advertise<std_msgs::Float64>("Topic2",100); } /** 订阅主题 "Topic1" 回调函数:RosBasics::msgCallback */ void RosBasics::initSubscribe() { ROS_INFO("subscribe initializing!"); sub_ = nh_.subscribe("Topic1",1,&RosBasics::msgCallback,this); } /** 请求服务: 服务端 "pwdcheck" 回调函数:&RosBasics::serverCallback */ void RosBasics::initServer() { ROS_INFO("server initializing!"); serv_ = nh_.advertiseService("pwdcheck",&RosBasics::serverCallback,this); } /** 处理请求 信息的 服务端回调函数 */ bool RosBasics::serverCallback(book_class::PassWord::Request& req, book_class::PassWord::Response& res) { res.result = (req.password == 123456) ? true:false; if(res.result) { ROS_INFO("Welcom, password correct!"); }else{ ROS_INFO("Sorry, password error!"); } return true; } //obtain message from Topic1 and add value then publish to Topic2 void RosBasics::msgCallback(const std_msgs::Float64& stdmsg) { std_msgs::Float64 msgpub; msgpub.data = stdmsg.data + 2; ROS_INFO("Receive date from Topic1 content is:%f",stdmsg.data); ROS_INFO("Publish date with Topic2 content is:%f",msgpub.data); pub_.publish(msgpub); } //test ros param void RosBasics::paramTest() { int Age; bool checkAge; checkAge = nh_.getParam("Age",Age); if(checkAge) { ROS_INFO("Welcome,Get Param Success!"); if(Age>=18) { ROS_INFO("You are adult!"); }else{ ROS_INFO("You are children!"); } }else{ ROS_INFO("Sorry,Get Param Fail!"); } } int main(int argc,char** argv) { //initial and name node ros::init(argc,argv,"node_classdemo"); //create node handle ros::NodeHandle nh; //instantiate class object RosBasics classdemo(nh); ros::spin(); return 0; }
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3) project(book_class) find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation) find_package(catkin REQUIRED COMPONENTS roscpp message_generation ) add_service_files(FILES PassWord.srv ) generate_messages(DEPENDENCIES std_msgs ) catkin_package( CATKIN_DEPENDS message_runtime # INCLUDE_DIRS include # LIBRARIES book_class # CATKIN_DEPENDS other_catkin_pkg # DEPENDS system_lib ) include_directories( include ${catkin_INCLUDE_DIRS} # include # ${catkin_INCLUDE_DIRS} ) add_executable(bc src/bc.cpp ) add_dependencies(bc ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) target_link_libraries(bc ${catkin_LIBRARIES} )
二、测试
rosrun book_class bc
rostopic pub -r 10 /Topic1 std_msgs/Float64 1
rosservice call pwdcheck 123456
rosparam set Age 18
rosrun rqt_graph rqt_graph