网上感觉没有什么很详细 + 证明的讲解啊)
前置:Kruskal 求最小生成树。
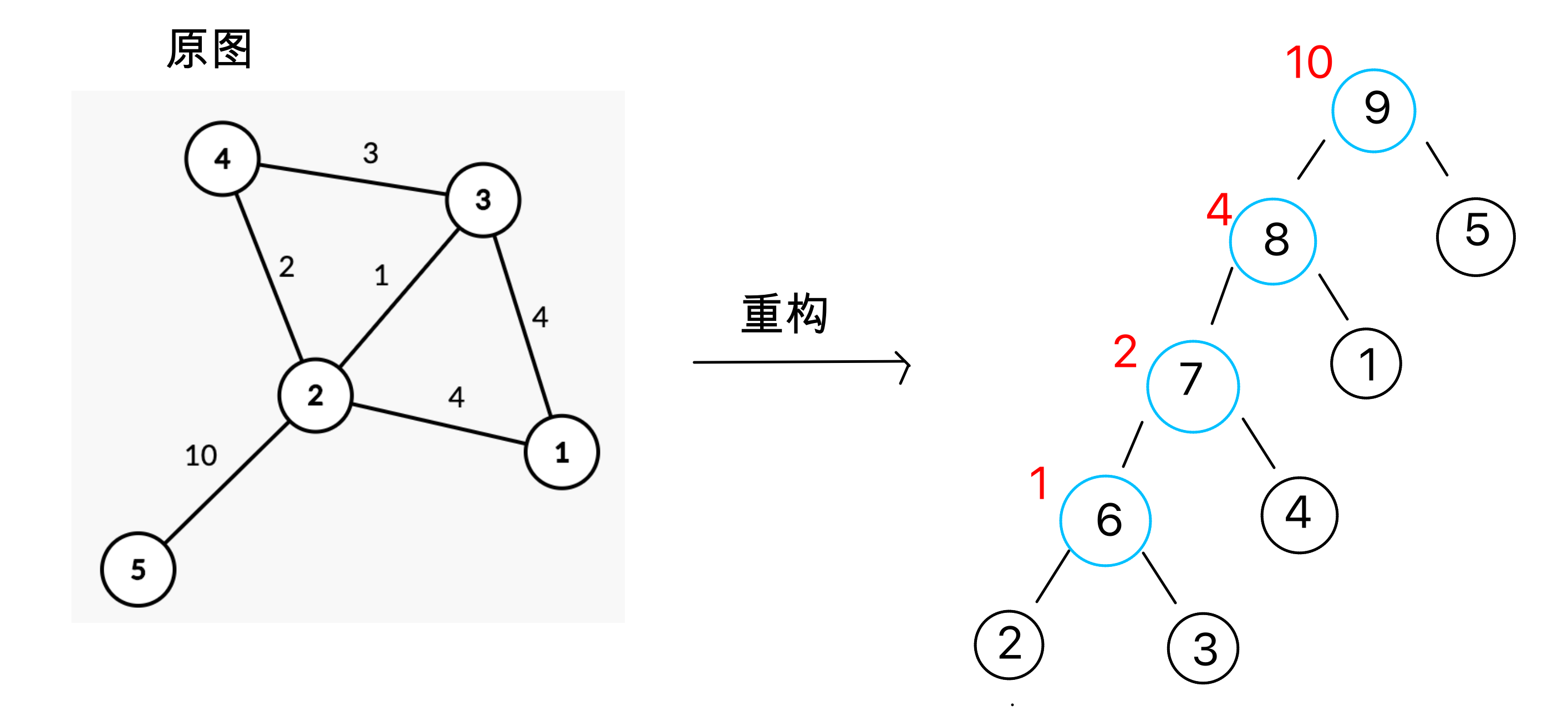
这个算法可以将一棵树 / 无向连通图重构成一颗有性质的新树。
算法可以解决一些树上瓶颈边权之类的问题,可以把需要持久化的并查集给代替掉。
设 (f_i) 为 (i) 所在联通块的根。
算法流程和 Kruskal 最小生成树的过程非常类似:
- 将所有边按边权从小到大排序
- 顺序遍历每条边 ((u, v, w)),若 (u, v) 已经联通跳过,否则建立一个新点 (x),让 (x) 作为 (f_u) 与 (f_v) 的父亲(即连 (x Rightarrow f_u) 和 (x Rightarrow f_v) 的有向边),然后让 (f_u = f_v = x)。这个新点的点权是 (w)。
时间复杂度 (O(m log m + n log n))。
最后,以最后一个建立的新点作为 (rt) ,就是一颗重构树了(下面是一个无向图联通变成重构树的例子,排序后第 (i) 条边的编号是 (n + i),点权是红色,蓝色是新点,黑色是原来的点)。
这棵树有如下性质:
- 原树若有 (n) 个节点,那么新树有 (2n - 1) 个节点,根是 (2n - 1)。因为建的新点就是合并两个点的次数,合并 (n - 1) 次。最后一次合并作为根,凑成了整个树。
- 所有原来的点就是叶子节点。因为建新图过程中我们没有让原来的点当父亲。
- 对于任意的 (x) 点,它的祖先链从下往上点权都是非严格递增的。因为每次合并的时候,只有 (le w) 的边都构造好了,所以此时 (f_u) 的点权也 (le w)。
- 重构树的点权是一个大根堆。跟上一个性质的等价的。
- 对于一个 (x) 和一个值 (v)。从 (x) 出发只经过 (le v) 的边能到达的点集 (=) (x) 的祖先节点中深度最小的点权 (le v) 的点 (z) 的子树中的原来的点集。(证明:这颗子树外的点显然不行,因为再往上点权 (> v),说明再往上其他的点使通过 (> v) 的边才和 (x) 点连上的,所以不行;这颗子树内的点显然可以,因为这是一个大根堆,所以子树内的点都可以用 (le v) 的边互相可达,他们在新树上的路径,经过的所有编号就是原树上经过的所有边。从这个角度,我们其实可以看作这个重构树以子树包含的形式等价于储存了 Kruscal 任何时间戳的版本。
- 对于任意 (x, y) ,其最小瓶颈边权(使其最大边最小的路径的最大边)为 (x, y) 在新树上的 LCA 点权。(x, y) 在经过 LCA 这条边后恰好联通,由于从小到大顺序执行,说明这条边是路径上最大的边。
如果求最大生成树,反着排序,那么偏序关系都反转,就不赘述了。
为了方便我自己创了一个名词,如果从小到大排序形成的大根堆叫 Kruscal 最小重构树,反之叫 Kruscal 最大重构树。
例题
预处理 (d_i) 表示从 (i) 到 (1) 的最短路径,这个反着建边跑最短路就行了。
问题变为:每个点有个权值,每个询问是从 (v) 出发经过权值 (> p) 的边能到的点的最小值,强制在线。
如果可以离线,那么从大到小排序边权,然后执行 Kruscal,维护一下每个联通块的最小值,每次在尝试完 merge (>p) 的所有边后,对应 (O(1)) 查询就可以了。
强制在线的话,可持久化并查集是 (O((n + q) log ^2 n)) 的,是可以 过 的。
用 Kruscal 重构树的话,从大到小排序边权建 Kruscal 最大重构树,那么从 (v) 出发经过 (> p) 的边能到的点 (=) (v) 的祖先中深度最小的满足点权 (> p) 的点 (x) 的子树中所有原来的点。
由于有单调性,倍增跳就好了,子树点权最小,预处理一下就好了。
复杂度 (O(m log m +(n + q) log n))
Code
#include <iostream>
#include <cstdio>
#include <cstring>
#include <queue>
#include <algorithm>
#include <vector>
using namespace std;
typedef pair<int, int> PII;
const int N = 200005, M = 400005, INF = 2e9, L = 19;
int n, m, Q, K, S, lastans, d[N], f[N << 1], w[N << 1], val[N << 1], cnt, fa[N << 1][L];
int head[N], numE = 0;
bool vis[N];
priority_queue<PII, vector<PII>, greater<PII> > q;
struct E {
int next, v, w;
} e[M << 1];
vector<int> g[N << 1];
struct Edge {
int u, v, w;
bool operator<(const Edge &b) const { return w > b.w; }
} b[M];
void inline add(int u, int v, int w) {
e[++numE] = (E){ head[u], v, w };
head[u] = numE;
}
void inline clear() {
memset(head, 0, sizeof head);
memset(fa, 0, sizeof fa);
numE = lastans = 0;
for (int i = 1; i < 2 * n; i++) g[i].clear();
}
void inline dijkstra() {
for (int i = 1; i <= n; i++) d[i] = INF, vis[i] = false;
q.push(make_pair(d[1] = 0, 1));
while (!q.empty()) {
PII u = q.top();
q.pop();
if (vis[u.second])
continue;
vis[u.second] = true;
for (int i = head[u.second]; i; i = e[i].next) {
int v = e[i].v;
if (d[u.second] + e[i].w < d[v]) {
d[v] = d[u.second] + e[i].w;
q.push(make_pair(d[v], v));
}
}
}
}
int find(int x) { return x == f[x] ? x : f[x] = find(f[x]); }
void inline kruscal() {
sort(b + 1, b + 1 + m);
for (int i = 1; i < 2 * n; i++) f[i] = i;
for (int i = 1; i <= m; i++) {
int u = find(b[i].u), v = find(b[i].v);
if (u == v)
continue;
++cnt;
g[cnt].push_back(u), g[cnt].push_back(v);
f[u] = f[v] = cnt, w[cnt] = b[i].w;
}
}
void dfs(int u) {
val[u] = u <= n ? d[u] : INF;
for (int i = 1; i < L && fa[u][i - 1]; i++) fa[u][i] = fa[fa[u][i - 1]][i - 1];
for (int i = 0; i < g[u].size(); i++) {
int v = g[u][i];
if (v == fa[u][0])
continue;
fa[v][0] = u;
dfs(v);
val[u] = min(val[u], val[v]);
}
}
int main() {
freopen("return.in", "r", stdin);
freopen("return.out", "w", stdout);
int T;
scanf("%d", &T);
while (T--) {
scanf("%d%d", &n, &m);
cnt = n;
for (int i = 1, u, v, l, a; i <= m; i++) {
scanf("%d%d%d%d", &u, &v, &l, &a);
add(u, v, l), add(v, u, l);
b[i] = (Edge){ u, v, a };
}
dijkstra();
kruscal();
dfs(2 * n - 1);
scanf("%d%d%d", &Q, &K, &S);
while (Q--) {
int v, p;
scanf("%d%d", &v, &p);
v = (v + K * lastans - 1) % n + 1;
p = (p + K * lastans) % (S + 1);
for (int i = L - 1; ~i; i--)
if (fa[v][i] && w[fa[v][i]] > p)
v = fa[v][i];
printf("%d
", lastans = val[v]);
}
if (T)
clear();
}
return 0;
}