在实际的机器人中往往有很多个传感器,比如我们组目前用的小车上就有相机,雷达,IMU 等,为了能够在 TF 系统中找到传感器之间的转换,就需要把每个传感器的坐标系加到系统的 TF 树中,方法很简单,下面一起来学习下。
一、TF 树的注意事项
在实际使用和调试 TF 的时候一定要时刻记住:TF 树中的一个节点可以有多个子节点,但是只能有一个父节点,并且 TF 树中不能出现回环!
一个典型的 TF 树如下:
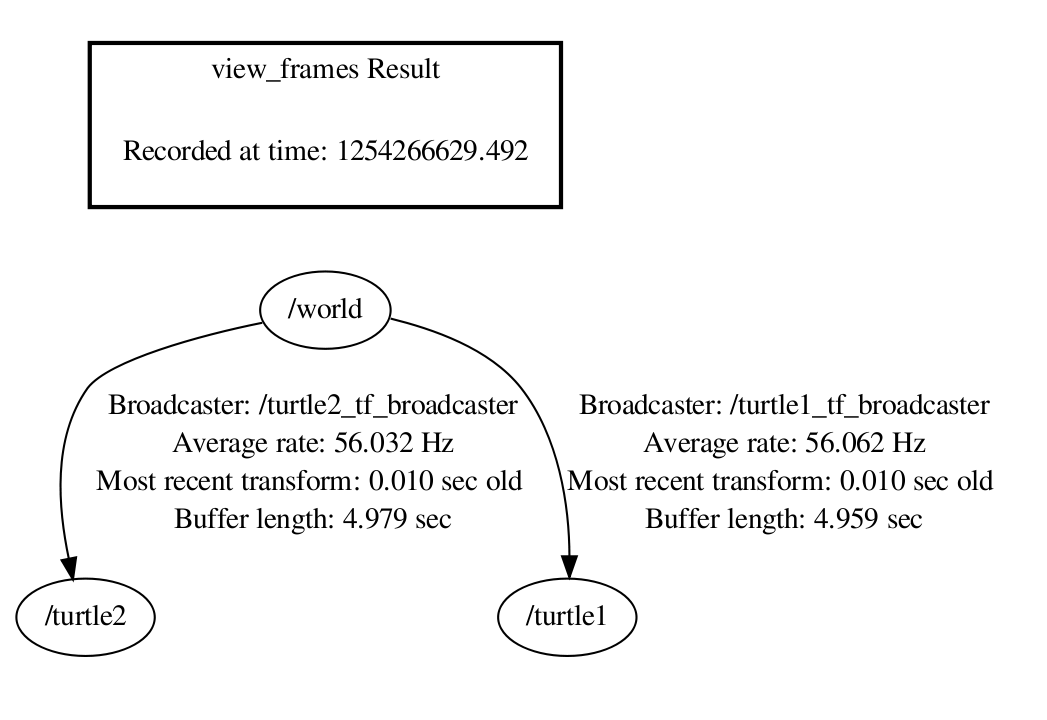
这个 TF 树中有 3 个坐标系:
- world:世界坐标系
- turtle1:乌龟 1 的坐标系,父节点是 world
- turtle2:乌龟 2 的坐标系,父节点时 world
如果你再发布一个「xxx -> turtle1」的变换,那 turtle1 就有 2 个父节点,这样是不可行的,违反了 TF 树的构建规则,实际使用是一定要注意了,如果你想查看系统当前的 TF 树,使用下面的命令:
rosrun rqt_tf_tree rqt_tf_tree
下面来学习如何为一个节点添加子坐标系。
二、添加子坐标系
同样进入 learning_tf2 包中:
roscd learning_tf2
然后在 src 下新建 frame_tf2_broadcaster.cpp 文件,代码如下:
#include <ros/ros.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_ros/transform_broadcaster.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "my_tf2_broadcaster");
ros::NodeHandle node;
tf2_ros::TransformBroadcaster tfb;
geometry_msgs::TransformStamped transformStamped;
// 指定 carrot1 的父节点时 turtle1
// 即添加一个新的 carrot1 子坐标系到 turtle1
transformStamped.header.frame_id = "turtle1";
transformStamped.child_frame_id = "carrot1";
// carrot1 相对于 tutle1 做了 y 轴的偏移
transformStamped.transform.translation.x = 0.0;
transformStamped.transform.translation.y = 2.0;
transformStamped.transform.translation.z = 0.0;
tf2::Quaternion q;
q.setRPY(0, 0, 0);
transformStamped.transform.rotation.x = q.x();
transformStamped.transform.rotation.y = q.y();
transformStamped.transform.rotation.z = q.z();
transformStamped.transform.rotation.w = q.w();
ros::Rate rate(10.0);
while (node.ok()) {
transformStamped.header.stamp = ros::Time::now();
// 这两行表示让该 carrot1 参考系随着时间移动
transformStamped.transform.translation.x = 2.0 * sin(ros::Time::now().toSec());
transformStamped.transform.translation.y = 2.0 * cos(ros::Time::now().toSec());
// 将 carrot1 相对于 tutle1 的坐标变换广播到 TF 系统中
tfb.sendTransform(transformStamped);
rate.sleep();
printf("sending
");
}
};
代码中最关键的就是要正确指定发布转换的 ID:
frame_id:父坐标系名称child_frame_id:子坐标系名称
然后添加编译规则:
add_executable(frame_tf2_broadcaster src/frame_tf2_broadcaster.cpp)
target_link_libraries(frame_tf2_broadcaster ${catkin_LIBRARIES})
编译:
catkin_make
在 launch 中添加启动:
<!--
这个例子一共创建了 5 个节点:
1. 乌龟节点,包含 2 个小乌龟
2. 控制乌龟运动的键盘节点
3. 第一个乌龟的 tf 广播者节点
4. 第二个乌龟的 tf 广播者节点
5. tf 坐标系统的监听节点,用来监听 2 个乌龟之间的坐标变换
-->
<launch>
<!-- 乌龟节点,这个节点的内部应该是创建了 2 个乌龟...... -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 控制乌龟运动的键盘节点 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 线速度和角速度的定义,但是在这个例子中并没有用到哎... -->
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<!-- 第一个乌龟的 tf 广播者节点,参数为乌龟 1 的名字 /tutle1 -->
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle1" name="turtle1_tf2_broadcaster" />
<!-- 第二个乌龟的 tf 广播者节点,还是用相同的节点,只不过改变了传递的参数为乌龟 2 的名字 /turtle2 -->
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle2" name="turtle2_tf2_broadcaster" />
<!-- 启动 tf 坐标系统的监听节点 -->
<node pkg="learning_tf2" type="turtle_tf2_listener" name="listener" />
<!-- 启动新添加的 carrot1 坐标系广播者节点 -->
<node pkg="learning_tf2" type="frame_tf2_broadcaster" name="broadcaster_frame" />
</launch>
开始启动节点:
roslaunch learning_tf2 start_demo.launch
不过你应该发现小乌龟的跟随运动跟上一个实验一模一样,我们自己添加的坐标系没有产生作用,这是为何呢?这是因为虽然我们发布了新的变换,但是我们并没有使用它,来修改下 listener 的代码:
transformStamped = listener.lookupTransform("/turtle2", "/carrot1", ros::Time(0));
把 /turtle1 坐标系改为 /carrot1,因为我们要使用新添加的坐标系,所以寻找变换的坐标系参数就要填写新添加的坐标系名称,这样系统才能正确找到新添加的变换,再次编译重新运行:
catkin_make
roslaunch learning_tf2 start_demo.launch
你应该会发现现在的小乌龟产生的跟随运动与之前不一定了,两者之间的 y 方向有一定的距离,这个距离就是我们发布变换时指定的坐标系的相对位置:
OK!TF 系统常用的基础就学完了,目前因为项目有用到 TF,所以写了几篇基础的文章,之前没有看过的可以再回过头看下:
