
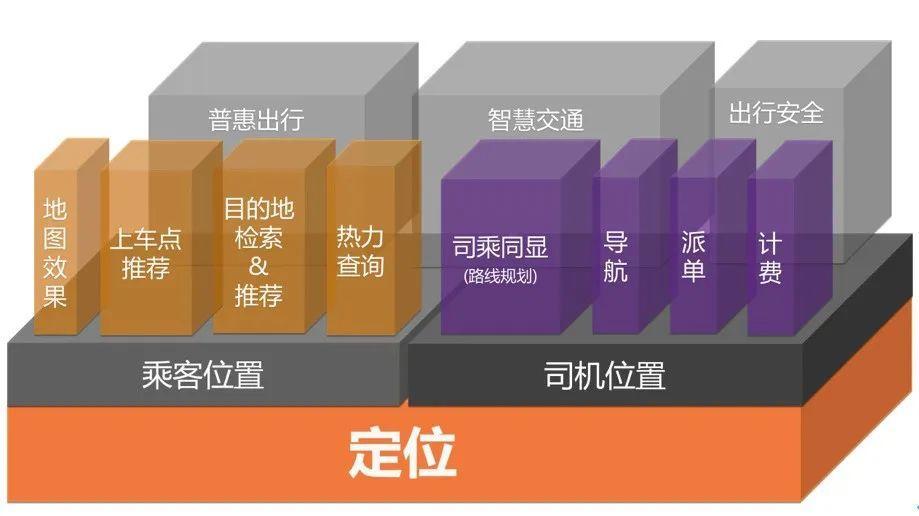
桔妹导读:定位是所有LBS服务的基础服务。在滴滴的业务场景下,定位主要是指各类终端设备的位置,包括手机、单车、行车记录仪、车机端等。作为底层服务,在滴滴日均提供700亿次定位服务,支撑着平台的各类业务。
今天给大家分享的是机器学习在滴滴网络定位中的实践工作,会重点介绍三阶段的演进:无监督模型、有监督回归模型、端到端CNN模型。
1. 什么是网络定位
目前定位技术主要包括GPS、网络定位、惯性航位推算、MM(地图匹配)、视觉定位等。GPS是最为人熟知的定位技术,是依靠设备与卫星交互来获取经纬度的方式。GPS精度高,但有冷启动耗时长、耗电大、遮挡场景不可用等缺点。在滴滴场景下,乘客和司机在有遮挡的场景下,例如室内、高架下等,GPS通常处于不可用状态。这时就需要有其他定位技术作为GPS的补充,使得乘客发单、司机导航等服务依然可用。其中最主要的补充便是网络定位。
室内类场景虽然有遮挡,但设备通常可以扫描到Cell(基站)和Wifi列表,而且Cell和Wifi设备位置相对稳定,连接其上的设备可以借其定位,这就产生了网络定位。网络定位包括wifi定位和基站定位,是指基于终端扫描到的wifi或基站列表进行的定位技术。Wifi的接入设备通常称为AP(Acess Point),方便起见,下文将AP和基站统称为AP。
网络定位通常采用的是指纹定位技术,是一个根据query匹配指纹库信息,并计算得到坐标位置的过程。如下图所示,网络定位系统主要包括离线建库和在线定位两个阶段。
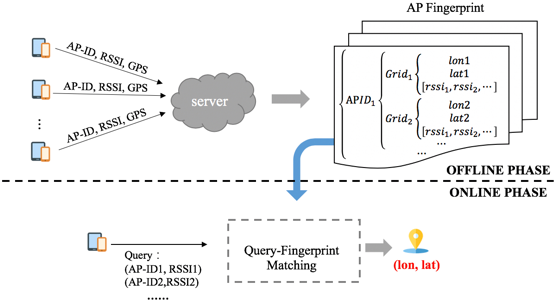
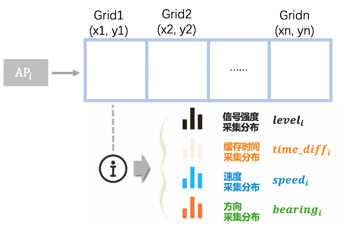
离线建库主要是基于有GPS时的采集数据,建指纹库的过程。指纹库中记录AP的各类信息在不同地理网格内的采集数据分布,如下图所示。
在线阶段,根据线上query匹配指纹库信息,并计算得到坐标位置。
本文介绍的主要是在线定位部分,即query匹配指纹库、计算坐标位置。
2. 网络定位匹配算法迭代
在线定位算法共经历了无监督概率模型、有监督回归模型、端到端CNN模型三次大的迭代。前两个阶段的网络定位主要包括网格召回、网格排序、网格平滑三步,如下图图一所示。端到端CNN模型去除了网格排序和网格平滑,基于一个召回中心点,直接回归位置坐标,如下图图二所示。
▍2.1 无监督概率模型
网络定位要完成在线AP与离线AP指纹库的匹配,是联合概率计算的过程。以AP指纹库的信号强度分布为例,看下网格概率计算过程。

纵轴为采集数据中的AP编号,横轴为空间网格编码,相交点表示每个AP在对应网格中的采集信号强度分布。空值表示AP在对应的位置无采集数据。
以一个实时定位query信息:(AP1:RSSI=1,AP3:RSSI=0)为例,介绍网格召回、排序、平滑的过程。
召回阶段,基于扫描到的AP1和AP3,可以召回Grid1、Grid2、Grid4;
排序阶段,结合离线AP库,基于独立性假设和贝叶斯公式,计算各网格的权重:

 表示观测到的APj的信息。以信号强度RSSI单一特征为例,上例中,
表示观测到的APj的信息。以信号强度RSSI单一特征为例,上例中,

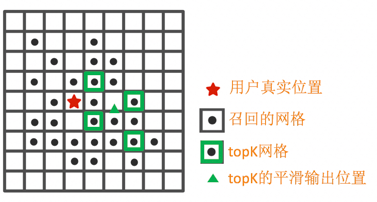
网格平滑阶段,基于上述的统计概率,排序获取TopK个网格,采用爬山法求解最优坐标:
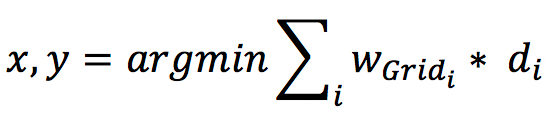
其中,
为预测位置到 的距离。
的距离。
▍2.2 有监督回归模型
无监督概率模型的方法,思路清晰易懂,易实现,是早期网络定位的主要方式。但有以下问题:
-
联合概率的方式对采集信息不充分的位置不友好,例如上例
-
难以拟合多维特征,尾部badcase较严重
-
技术目标无法得到直接优化,天花板较低
出于对以上问题的思考,整体流程仍保持网格召回、排序、平滑三阶段,我们将网格排序升级为有监督回归模型,通过引入多元特征和显式的优化目标,实现对网格的更精准打分。
Label:待预测网格与真实位置的位置偏差,回归任务。
特征工程:构建近百维特征,主要包含AP特征,网格特征,前文信息等。
模型选择:一期上线GBDT模型;二期对比了GBDT、FM、DeepFM、FM+GBDT等,最终线上最优融合模型结构如下。

原始特征中的稠密特征和低维稀疏特征经过GBDT进行特征组合、交叉;GBDT输出的叶子节点编号与高维稀疏特征经过DeepFM网络,最终输出网格与真值的位置偏差。
TopK网格平滑:预测偏差距离从小到大排序,截取TopK网格;爬山法,梯度下降求解最优坐标。
▍2.3 端到端CNN模型
有监督模型在特征利用、模型结构、优化目标等方面提供了更大的操作空间,可以极大地打开天花板。上线后定位精度等指标取得了显著的收益。
但该方法仍有以下问题:
-
每个网格孤立刻画,信息采集时的不均衡、有偏的问题无法有效解决
-
TopK平滑层与排序层割裂,无法联合优化,且引入部分人工超参
对于以上问题,考虑以下解决方案:
-
CNN网络:充分利用空间信息的局部相关性,增强特征的提取能力
-
端到端网络:合并排序与平滑层,改为直接回归位置坐标,目标更统一,减少人工超参
最终,整体网络结构如下:

下面以基站定位为例,介绍该结构的实现细节。
首先介绍下输入特征的构建:
-
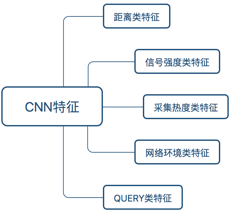
Wide网络特征:表达Query信息的Wide特征共十几维
-
CNN特征图的构建:
-
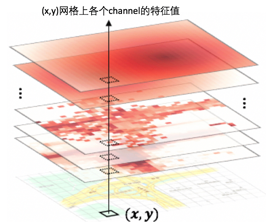
召回中心:采集热度较高的TopN网格的经纬度中位数作为图的中心点。
-
特征图构建:选取C维图特征,每一维特征为一个channel;基于召回中心,构建M*M分辨率的特征图。
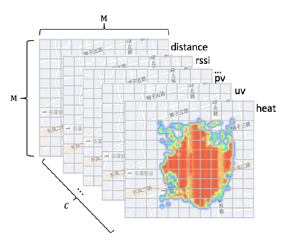
网络结构:在CNN网络部分,采用多尺度卷积核提取特征后,经过两个卷积+池化层后,将特征图打平。Wide部分稀疏特征经过embedding后,与稠密特征级联。两部分tensor级联后经过全连接层,最终输出与召回中心点的位置偏差。
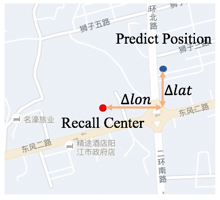
Label与Loss:label为真实位置与召回中心位置的偏移dx和dy,召回中心点+预测偏移即得预测位置。loss最初使用的是经纬度的L2 loss:

考虑到经纬度在球面上表达距离的差异,我们改为了使用球面距离偏差作为label,也获得了稳定的收益:
 ,dx和dy表示真实空间距离
,dx和dy表示真实空间距离
CNN模型在线上AB实验取得了显著的收益,已全量上线。CNN端到端模型升级了信息的表达方式,由单网格、结构化的信息表达改为了Image的表达方式,配合cnn网络结构,获取了效果的显著提升;并且将几十甚至几百个网格的预测问题改为了单次位置回归问题,虽然模型复杂度有所增加,但整体性能基本持平。
▍2.4 线上效果
网络定位三阶段的模型先后上线进行了AB对比实验。以基站定位三个主要技术指标为例,对比结果如下表所示:

3. 总结与展望
本文总结了定位策略团队在网络定位算法侧的工作,介绍了无监督概率模型、有监督回归模型、端到端CNN的演进及其中的思考。
无GPS时的定位仍面临着很多困难,未来我们将在以下方面持续探索:
-
模型效果优化:
目前CNN模型在基础信息利用、召回等方面仍有较大优化空间。
-
性能问题:
考虑线上性能,在基础信息和网络结构上做了很多删减。期望通过更优的召回策略、蒸馏剪枝等平衡效果与性能。
-
5G技术:
5G的天然优势(高频率、高密度、低延时)也必定会带来定位精度的显著提升,相关调研工作正在进行。
-
复杂场景定位:
对于室内、地下停车场等典型复杂场景,网络定位面临着真值获取难、移动ap等难点。细分场景也逐渐向模型化方向演进。
以上就是滴滴网络定位近期工作的实践介绍,欢迎随时交流。
本文作者

2017年加入滴滴,目前从事地图定位算法方向,多年LBS领域算法研究工作,在滴滴先后从事猜你想去、上下车点推荐、定位算法等方向的开发工作。

2018年加入滴滴,主要从事网络定位、惯导推算等方向的算法开发工作。

201#8年加入滴滴,主要从事网络定位、融合定位等方向的算法开发工作。
团队招聘
滴滴地图与公交事业群定位团队负责为滴滴平台上的司乘双方提供精准的定位服务,构建出行基础设施,发挥平台的大数据优势,应用概率统计、机器学习、深度学习等技术,在GPS质量优化、网络定位、惯导推算、融合定位等细分方向上持续深耕,以技术驱动用户体验的提升。团队长期招聘算法工程师,包括机器学习、惯导推算等方向,欢迎有兴趣的小伙伴加入,可投递简历至 diditech@didiglobal.com,邮件请邮件主题请命名为「姓名-应聘部门-应聘方向」。
延伸阅读


内容编辑 | Charlotte&Teeo
联系我们 | DiDiTech@didiglobal.com
滴滴技术 出品