原文地址:
https://www.cnblogs.com/pinard/p/9714655.html
-----------------------------------------------------------------------------------------
在强化学习系列的前七篇里,我们主要讨论的都是规模比较小的强化学习问题求解算法。今天开始我们步入深度强化学习。这一篇关注于价值函数的近似表示和Deep Q-Learning算法。
Deep Q-Learning这一篇对应Sutton书的第11章部分和UCL强化学习课程的第六讲。
1. 为何需要价值函数的近似表示
在之前讲到了强化学习求解方法,无论是动态规划DP,蒙特卡罗方法MC,还是时序差分TD,使用的状态都是离散的有限个状态集合 S。此时问题的规模比较小,比较容易求解。但是假如我们遇到复杂的状态集合呢?甚至很多时候,状态是连续的,那么就算离散化后,集合也很大,此时我们的传统方法,比如Q-Learning,根本无法在内存中维护这么大的一张Q表。
比如经典的冰球世界(PuckWorld) 强化学习问题,具体的动态demo见这里。环境由一个正方形区域构成代表着冰球场地,场地内大的圆代表着运动员个体,小圆代表着目标冰球。在这个正方形环境中,小圆会每隔一定的时间随机改变在场地的位置,而代表个体的大圆的任务就是尽可能快的接近冰球目标。大圆可以操作的行为是在水平和竖直共四个方向上施加一个时间步时长的一个大小固定的力,借此来改变大圆的速度。环境会在每一个时间步内告诉个体当前的水平与垂直坐标、当前的速度在水平和垂直方向上的分量以及目标的水平和垂直坐标共6项数据,奖励值为个体与目标两者中心距离的负数,也就是距离越大奖励值越低且最高奖励值为0。
在这个问题中,状态是一个6维的向量,并且是连续值。没法直接用之前离散集合的方法来描述状态。当然,你可以说,我们可以把连续特征离散化。比如把这个冰球场100x100的框按1x1的格子划分成10000个格子,那么对于运动员的坐标和冰球的坐标就有 25∗25=210次种,如果再加上个体速度的分量就更是天文数字了,此时之前讲过的强化学习方法都会因为问题的规模太大而无法使用。怎么办呢?必须要对问题的建模做修改了,而价值函数的近似表示就是一个可行的方法。
25∗25=210次种,如果再加上个体速度的分量就更是天文数字了,此时之前讲过的强化学习方法都会因为问题的规模太大而无法使用。怎么办呢?必须要对问题的建模做修改了,而价值函数的近似表示就是一个可行的方法。
2. 价值函数的近似表示方法



当然,除了线性表示法,我们还可以用决策树,最近邻,傅里叶变换,神经网络来表达我们的状态价值函数。而最常见,应用最广泛的表示方法是神经网络。因此后面我们的近似表达方法如果没有特别提到,都是指的神经网络的近似表示。
对于神经网络,可以使用DNN,CNN或者RNN。没有特别的限制。如果把我们计算价值函数的神经网络看做一个黑盒子,那么整个近似过程可以看做下面这三种情况:
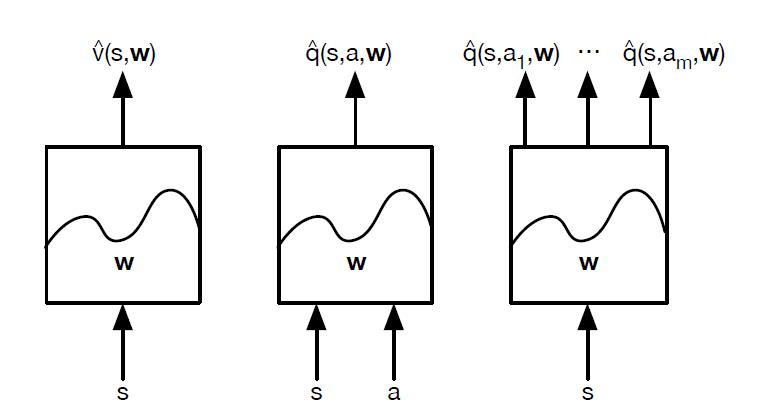

对于我们前一篇讲到的Q-Learning算法,我们现在就价值函数的近似表示来将其改造,采用上面右边的第三幅图的动作价值函数建模思路来做,现在我们叫它Deep Q-Learning。
3. Deep Q-Learning算法思路
Deep Q-Learning算法的基本思路来源于Q-Learning。但是和Q-Learning不同的地方在于,它的Q值的计算不是直接通过状态值s和动作来计算,而是通过上面讲到的Q网络来计算的。这个Q网络是一个神经网络,我们一般简称Deep Q-Learning为DQN。

DQN主要使用的技巧是经验回放(experience replay),即将每次和环境交互得到的奖励与状态更新情况都保存起来,用于后面目标Q值的更新。为什么需要经验回放呢?我们回忆一下Q-Learning,它是有一张Q表来保存所有的Q值的当前结果的,但是DQN是没有的,那么在做动作价值函数更新的时候,就需要其他的方法,这个方法就是经验回放。
通过经验回放得到的目标Q值和通过Q网络计算的Q值肯定是有误差的,那么我们可以通过梯度的反向传播来更新神经网络的参数ww,当ww收敛后,我们的就得到的近似的Q值计算方法,进而贪婪策略也就求出来了。
下面我们总结下DQN的算法流程,基于NIPS 2013 DQN。
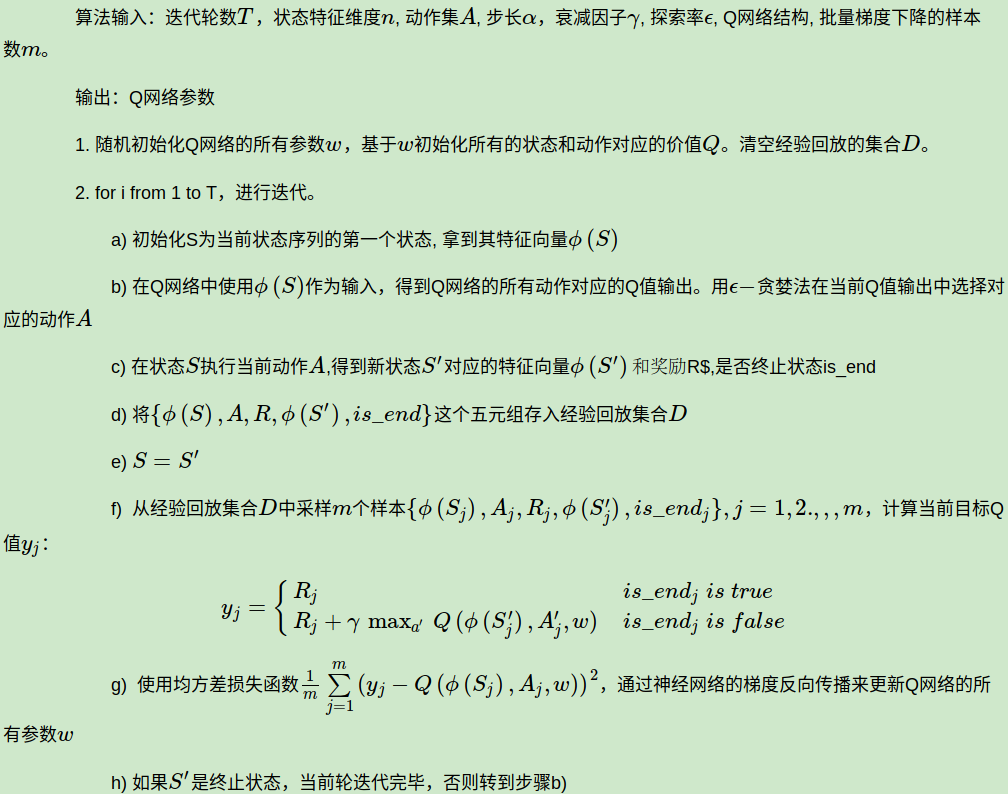
注意,上述第二步的f步和g步的Q值计算也都需要通过Q网络计算得到。另外,实际应用中,为了算法较好的收敛,探索率εϵ需要随着迭代的进行而变小。
4. Deep Q-Learning实例
下面我们用一个具体的例子来演示DQN的应用。这里使用了OpenAI Gym中的CartPole-v0游戏来作为我们算法应用。CartPole-v0游戏的介绍参见这里。它比较简单,基本要求就是控制下面的cart移动使连接在上面的pole保持垂直不倒。这个任务只有两个离散动作,要么向左用力,要么向右用力。而state状态就是这个cart的位置和速度, pole的角度和角速度,4维的特征。坚持到200分的奖励则为过关。
完整的代码参见我的github: https://github.com/ljpzzz/machinelearning/blob/master/reinforcement-learning/dqn.py
代码参考了知乎上的一个DQN实例,修改了代码中的一些错误,并用最新的Python3.6+Tensorflow1.8.0运行。要跑代码需要安装OpenAI的Gym库,使用"pip install gym"即可。
代码使用了一个三层的神经网络,输入层,一个隐藏层和一个输出层。下面我们看看关键部分的代码。

def egreedy_action(self,state): Q_value = self.Q_value.eval(feed_dict = { self.state_input:[state] })[0] if random.random() <= self.epsilon: self.epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / 10000 return random.randint(0,self.action_dim - 1) else: self.epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / 10000 return np.argmax(Q_value)

next_state,reward,done,_ = env.step(action) # Define reward for agent reward = -1 if done else 0.1
算法第2步的步骤d保存经验回放数据的代码如下:
def perceive(self,state,action,reward,next_state,done): one_hot_action = np.zeros(self.action_dim) one_hot_action[action] = 1 self.replay_buffer.append((state,one_hot_action,reward,next_state,done)) if len(self.replay_buffer) > REPLAY_SIZE: self.replay_buffer.popleft() if len(self.replay_buffer) > BATCH_SIZE: self.train_Q_network()
算法第2步的步骤f,g计算目标Q值,并更新Q网络的代码如下:
def train_Q_network(self): self.time_step += 1 # Step 1: obtain random minibatch from replay memory minibatch = random.sample(self.replay_buffer,BATCH_SIZE) state_batch = [data[0] for data in minibatch] action_batch = [data[1] for data in minibatch] reward_batch = [data[2] for data in minibatch] next_state_batch = [data[3] for data in minibatch] # Step 2: calculate y y_batch = [] Q_value_batch = self.Q_value.eval(feed_dict={self.state_input:next_state_batch}) for i in range(0,BATCH_SIZE): done = minibatch[i][4] if done: y_batch.append(reward_batch[i]) else : y_batch.append(reward_batch[i] + GAMMA * np.max(Q_value_batch[i])) self.optimizer.run(feed_dict={ self.y_input:y_batch, self.action_input:action_batch, self.state_input:state_batch })
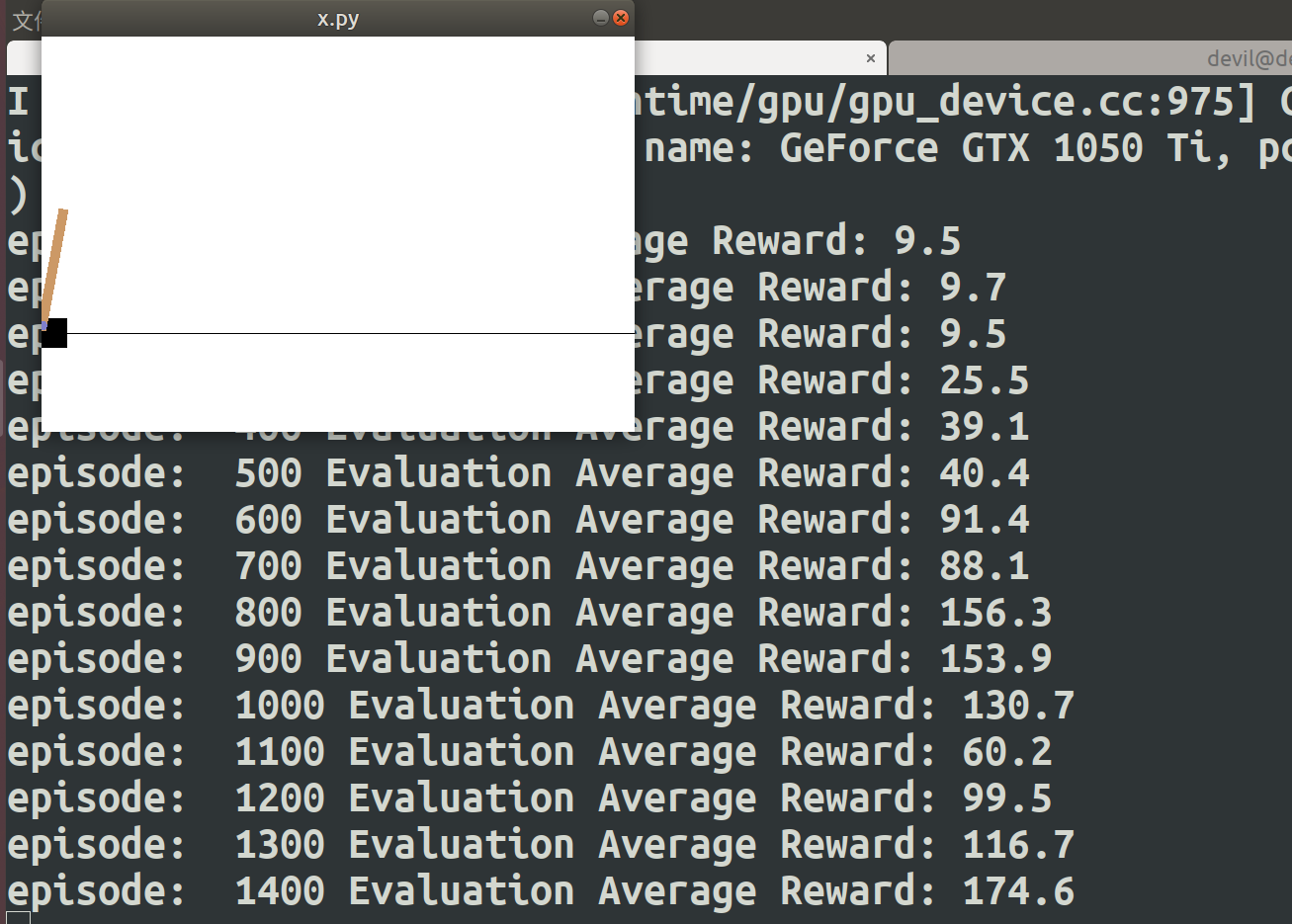
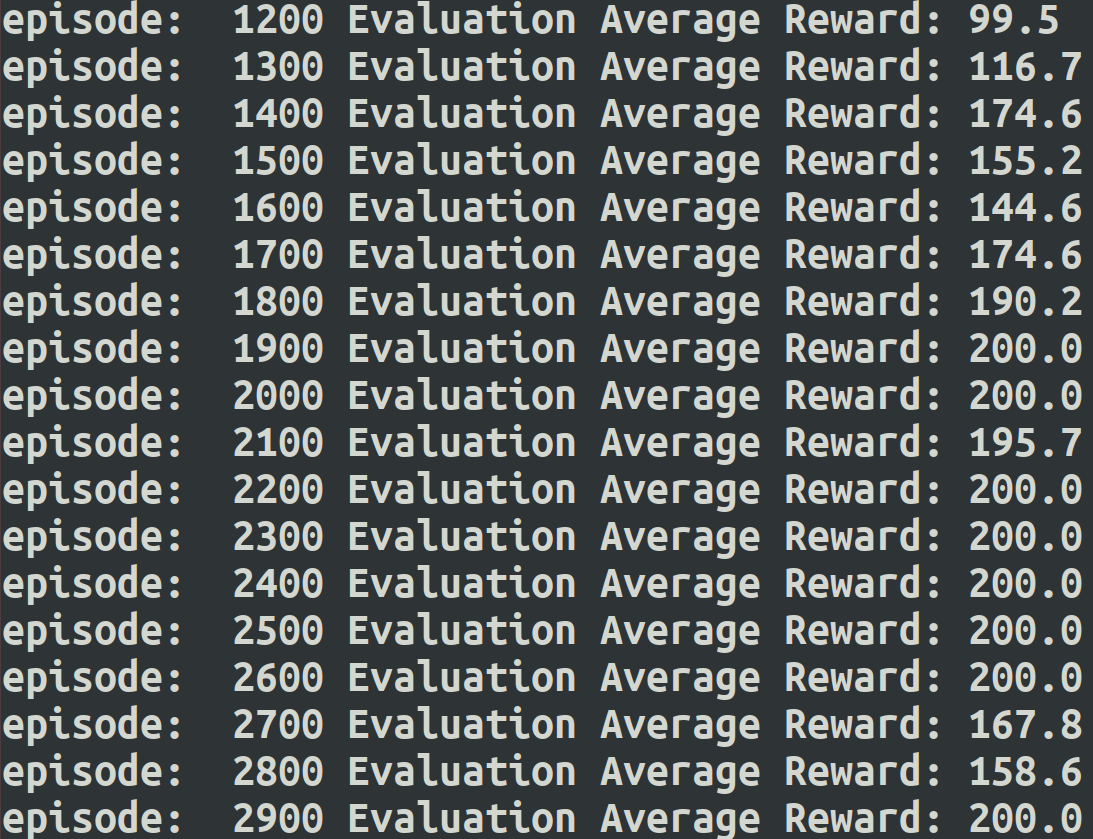
我们在每100轮迭代完后会去玩10次交互测试,计算10次的平均奖励。运行了代码后,我的3000轮迭代的输出如下:
episode: 0 Evaluation Average Reward: 12.2
episode: 100 Evaluation Average Reward: 9.4
episode: 200 Evaluation Average Reward: 10.4
episode: 300 Evaluation Average Reward: 10.5
episode: 400 Evaluation Average Reward: 11.6
episode: 500 Evaluation Average Reward: 12.4
episode: 600 Evaluation Average Reward: 29.6
episode: 700 Evaluation Average Reward: 48.1
episode: 800 Evaluation Average Reward: 85.0
episode: 900 Evaluation Average Reward: 169.4
episode: 1000 Evaluation Average Reward: 200.0
episode: 1100 Evaluation Average Reward: 200.0
episode: 1200 Evaluation Average Reward: 200.0
episode: 1300 Evaluation Average Reward: 200.0
episode: 1400 Evaluation Average Reward: 200.0
episode: 1500 Evaluation Average Reward: 200.0
episode: 1600 Evaluation Average Reward: 200.0
episode: 1700 Evaluation Average Reward: 200.0
episode: 1800 Evaluation Average Reward: 200.0
episode: 1900 Evaluation Average Reward: 200.0
episode: 2000 Evaluation Average Reward: 200.0
episode: 2100 Evaluation Average Reward: 200.0
episode: 2200 Evaluation Average Reward: 200.0
episode: 2300 Evaluation Average Reward: 200.0
episode: 2400 Evaluation Average Reward: 200.0
episode: 2500 Evaluation Average Reward: 200.0
episode: 2600 Evaluation Average Reward: 200.0
episode: 2700 Evaluation Average Reward: 200.0
episode: 2800 Evaluation Average Reward: 200.0
episode: 2900 Evaluation Average Reward: 200.0
大概到第1000次迭代后,算法已经收敛,达到最高的200分。当然由于是ε-探索ϵ−,每次前面的输出可能不同,但最后应该都可以收敛到200的分数。当然由于DQN不保证绝对的收敛,所以可能到了200分后还会有抖动。
5. Deep Q-Learning小结
DQN由于对价值函数做了近似表示,因此有了解决大规模强化学习问题的能力。但是DQN有个问题,就是它并不一定能保证Q网络的收敛,也就是说,我们不一定可以得到收敛后的Q网络参数。这会导致我们训练出的模型效果很差。
针对这个问题,衍生出了DQN的很多变种,比如Nature DQN(NIPS 2015), Double DQN,Dueling DQN等。这些我们在下一篇讨论。
(欢迎转载,转载请注明出处。欢迎沟通交流: liujianping-ok@163.com)
-------------------------------------------------------------------------------------------------------
####################################################################### # Copyright (C) # # 2016 - 2019 Pinard Liu(liujianping-ok@163.com) # # https://www.cnblogs.com/pinard # # Permission given to modify the code as long as you keep this # # declaration at the top # ####################################################################### ##https://www.cnblogs.com/pinard/p/9714655.html ## ## 强化学习(八)价值函数的近似表示与Deep Q-Learning ## import gym import tensorflow as tf import numpy as np import random from collections import deque # Hyper Parameters for DQN GAMMA = 0.9 # discount factor for target Q INITIAL_EPSILON = 0.5 # starting value of epsilon FINAL_EPSILON = 0.01 # final value of epsilon REPLAY_SIZE = 10000 # experience replay buffer size BATCH_SIZE = 32 # size of minibatch class DQN(): # DQN Agent def __init__(self, env): # init experience replay self.replay_buffer = deque() # init some parameters self.time_step = 0 self.epsilon = INITIAL_EPSILON self.state_dim = env.observation_space.shape[0] self.action_dim = env.action_space.n self.create_Q_network() self.create_training_method() # Init session self.session = tf.InteractiveSession() self.session.run(tf.global_variables_initializer()) def create_Q_network(self): # network weights W1 = self.weight_variable([self.state_dim,20]) b1 = self.bias_variable([20]) W2 = self.weight_variable([20,self.action_dim]) b2 = self.bias_variable([self.action_dim]) # input layer self.state_input = tf.placeholder("float",[None,self.state_dim]) # hidden layers h_layer = tf.nn.relu(tf.matmul(self.state_input,W1) + b1) # Q Value layer self.Q_value = tf.matmul(h_layer,W2) + b2 def create_training_method(self): self.action_input = tf.placeholder("float",[None,self.action_dim]) # one hot presentation self.y_input = tf.placeholder("float",[None]) Q_action = tf.reduce_sum(tf.multiply(self.Q_value,self.action_input),reduction_indices = 1) self.cost = tf.reduce_mean(tf.square(self.y_input - Q_action)) self.optimizer = tf.train.AdamOptimizer(0.0001).minimize(self.cost) def perceive(self,state,action,reward,next_state,done): one_hot_action = np.zeros(self.action_dim) one_hot_action[action] = 1 self.replay_buffer.append((state,one_hot_action,reward,next_state,done)) if len(self.replay_buffer) > REPLAY_SIZE: self.replay_buffer.popleft() if len(self.replay_buffer) > BATCH_SIZE: self.train_Q_network() def train_Q_network(self): self.time_step += 1 # Step 1: obtain random minibatch from replay memory minibatch = random.sample(self.replay_buffer,BATCH_SIZE) state_batch = [data[0] for data in minibatch] action_batch = [data[1] for data in minibatch] reward_batch = [data[2] for data in minibatch] next_state_batch = [data[3] for data in minibatch] # Step 2: calculate y y_batch = [] Q_value_batch = self.Q_value.eval(feed_dict={self.state_input:next_state_batch}) for i in range(0,BATCH_SIZE): done = minibatch[i][4] if done: y_batch.append(reward_batch[i]) else : y_batch.append(reward_batch[i] + GAMMA * np.max(Q_value_batch[i])) self.optimizer.run(feed_dict={ self.y_input:y_batch, self.action_input:action_batch, self.state_input:state_batch }) def egreedy_action(self,state): Q_value = self.Q_value.eval(feed_dict = { self.state_input:[state] })[0] if random.random() <= self.epsilon: self.epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / 10000 return random.randint(0,self.action_dim - 1) else: self.epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / 10000 return np.argmax(Q_value) def action(self,state): return np.argmax(self.Q_value.eval(feed_dict = { self.state_input:[state] })[0]) def weight_variable(self,shape): initial = tf.truncated_normal(shape) return tf.Variable(initial) def bias_variable(self,shape): initial = tf.constant(0.01, shape = shape) return tf.Variable(initial) # --------------------------------------------------------- # Hyper Parameters ENV_NAME = 'CartPole-v0' EPISODE = 3000 # Episode limitation STEP = 300 # Step limitation in an episode TEST = 10 # The number of experiment test every 100 episode def main(): # initialize OpenAI Gym env and dqn agent env = gym.make(ENV_NAME) agent = DQN(env) for episode in range(EPISODE): # initialize task state = env.reset() # Train for step in range(STEP): action = agent.egreedy_action(state) # e-greedy action for train next_state,reward,done,_ = env.step(action) # Define reward for agent reward = -1 if done else 0.1 agent.perceive(state,action,reward,next_state,done) state = next_state if done: break # Test every 100 episodes if episode % 100 == 0: total_reward = 0 for i in range(TEST): state = env.reset() for j in range(STEP): env.render() action = agent.action(state) # direct action for test state,reward,done,_ = env.step(action) total_reward += reward if done: break ave_reward = total_reward/TEST print ('episode: ',episode,'Evaluation Average Reward:',ave_reward) if __name__ == '__main__': main()