1. ParticleSystem
ParticleData是存储粒子数据的类,ParticleSystem会关联一个ParticleData对象。
ParticleSystem直接继承了Node、TextureProtocol(纹理)、PlayableProtocol(start stop方法)。
ParticleSystem定义了粒子的相关属性。
粒子从ParticleSystem的位置发射。
属性
- float _elapsed
运行时间。
粒子相关属性
- float _startSize, _startSizeVar, _endSize, _endSizeVar
粒子大小及浮动值。
- Color4F _startColor, _startColorVar, _endColor, _endColorVar
粒子颜色值及浮动值。
- float _startSpin, _startSpinVar, _endSpin, _endSpinVar
粒子自身旋转的角度值及浮动值。
- PositionType _positionType
粒子位置模式,有3种:FREE(粒子在世界坐标系移动)、RELATIVE(粒子相对父节点坐标系移动)、GROUPED(粒子跟随发射点移动)。
- float _life, _lifeVar
粒子生存时间及浮动值。
发射相关属性
- float _angle, _angleVar
粒子发射的角度及浮动值。
- Mode _emitterMode
发射器模式。发射有2种模式,用枚举Mode表示:
Gravity:重力模式,Mode A,属性:重力加速度(向量表示)、速度和浮动值(粒子的初速度)、径向加速度和浮动值(与速度方向平行)、切向加速度和浮动值(与速度方向垂直)。
Radius:径向模式,Mode B,属性:起始半径和浮动值(粒子出生时和圆心距离)、结束半径和浮动值(粒子死亡时和圆心距离)、每秒旋转的角度和浮动值。
- float _emissionRate
发射器每秒发射的粒子数。
- int _totalParticles
生存的粒子最大数量。
- int _particleCount
当前生存的粒子数。
- float _duration
发射器工作时长,-1为永远发射。
- Vec2 _sourcePosition, _posVar
发射位置及发射位置的浮动值。
_sourcePosition与bool _sourcePositionCompatible有关,布尔值默认为true表明兼容,位置将被设置到node的位置变量;为false位置将被设置到_sourcePosition变量。
两个静态属性
- static Vector<ParticleSystem*> __allInstances
存储粒子系统的容器。
- static float __totalParticleCountFactor
该属性默认为1。在update方法中,最大粒子数_totalParticles乘该系数,得到最大粒子数。
1. 创建
粒子对象的创建可以分为这3种方法:
- 通过代码创建ParticleSystemQuad,并设置属性
- 通过plist文件创建
- 直接通过代码使用现成的粒子子类实现特效
plist文件会被转成ValueMap,从而对plist的各项数据进行解析,相关属性值赋给ParticleSystem属性。
2. onEnter() onExit()方法
在执行addChild方法将粒子节点加到父节点时,会调用节点的onEnter方法。
ParticleSystem的onEnter方法中有这两行:
this->scheduleUpdateWithPriority(1); __allInstances.pushBack(this);
先设置update方法将在每帧执行。再将当前粒子类加入静态容器__allInstances中。
ParticleSystem的onExit方法会执行unscheduleUpdate,停止每帧执行update(dt),并从静态容器__allInstances中删除粒子类。
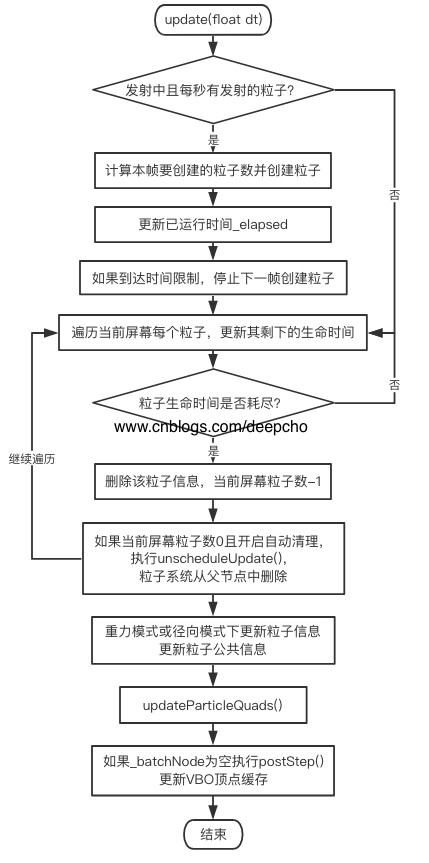
3. update(dt)方法
该方法被调度器Scheduler每帧触发,粒子的更新离不开这个重要的方法。
4. 粒子添加与粒子到期后删除
ParticleSystem成员_particleCount表示当前存在屏幕上的粒子数(当前已生成没销毁的粒子数)。
在update(dt)中,每帧会调用粒子添加的方法addParticles(int count)。
添加数量为count的粒子,实际上是把粒子的数据被添加到ParticleSystem成员中_particleData。
新增的各个粒子各项数据是被修改到从对应的_particleData数组成员的“最末尾”的下标位置开始,要添加多少个粒子,就修改多少个指针。“最末尾”的下标指的是根据_particleCount得出。
粒子到期后删除时,也是在update(dt)方法中删除,但是没有真正执行“删除”操作,而是将_particleData最末尾(数组成员最末尾)的数据复制到当前粒子的位置上,并对_particleCount减1。
我们知道,在update方法中是把_particleData每个数组成员前_particleCount项作为当前存在的粒子的数据并进行更新。所以,“被复制”的数据项位置实际上在之后的update中被“忽略”了,所以该项的数据只会被新增的粒子覆盖,而前面被删除的粒子的数据位置被这个“被复制”的数据项覆盖,保证了数组成员前_particleCount项始终代表着当前存在的粒子的数据。
总结ParticleSystem
ParticleSystem关联一个ParticleData。
每个粒子当前的属性值状态信息等,被保存在ParticleData中。而ParticleSystem中的粒子信息是我们直接设置的,例如浮动值只存储在ParticleSystem成员变量中。
每一次update时,新建的粒子和当前粒子状态各项信息通过计算后,都被保存在ParticleData中。
尽管ParticleData是一个类,我们可以把它理解成是一个“容器”。粒子系统ParticleSystem主要是提供对粒子当前信息ParticleData“容器”的管理,例如对“容器”修改、更新、添加等。所以说,粒子系统ParticleSystem是所有粒子的基类,只负责粒子最基础的创建和存储功能。
2. ParticleSystemQuad
ParticleSystemQuad直接继承了ParticleSystem。所有粒子特效类都是ParticleSystemQuad的子类。
该类在父类的基础上增加了对粒子的绘制功能。
1. 顶点缓存与索引缓存
ParticleSystemQuad有两个重要变量:顶点缓存和索引缓存。
- V3F_C4B_T2F_Quad *_quads
顶点缓存:包含多个顶点数据的一块内存,一个四边形的4个顶点信息作为一个单位进行存储。每一个V3F_C4B_T2F_Quad结构体存储了4个顶点的信息(4个V3F_C4B_T2F结构体对象),每个顶点的信息包括三维顶点坐标、颜色和透明度、纹理UV坐标。
- GLushort *_indices
索引缓存:每6个索引对应一个四边形,OpenGL是通过三角形来绘制四边形的,所以一个四边形需要两个三角形的顶点数据,也就是6个索引对应1个V3F_C4B_T2F_Quad了。
在所有粒子效果类的create方法中,都会调用ParticleSystemQuad的initWithTotalParticles方法进行初始化,该方法会调用allocMemory分配粒子效果类需要的顶点缓存和索引缓存的内存区域。
内存的个数为我们设置的最大粒子数。
对于顶点缓存,每块内存的大小为V3F_C4B_T2F_Quad结构体的大小。对于索引缓存,每块内存为索引的6倍,也就是说把一个四边形需要的所有6个索引作为一个内存区域存储。大致逻辑是:
memset(_quads, 0, _totalParticles * sizeof(V3F_C4B_T2F_Quad)); memset(_indices, 0, _totalParticles * 6 * sizeof(GLushort));
索引缓存是对顶点缓存的映射,这样可以对于重复的顶点使用一个内存进行存储。
在刚才说的initWithTotalParticles方法进行两个缓存内存的分配之后,对索引缓存设置索引值,设置索引指向的顶点位置。具体步骤如下:
for(int i = 0; i < _totalParticles; ++i) { const unsigned int i6 = i*6; const unsigned int i4 = i*4; _indices[i6+0] = (GLushort) i4+0; _indices[i6+1] = (GLushort) i4+1; _indices[i6+2] = (GLushort) i4+2; _indices[i6+5] = (GLushort) i4+1; _indices[i6+4] = (GLushort) i4+2; _indices[i6+3] = (GLushort) i4+3; }
另外,在setTotalParticles(int tp)方法中,根据参数最大粒子数,对顶点缓存_quads和索引缓存_indices大小更新并初始化,使用的也是类似上面的思路。
2. initTexCoordsWithRect(rect)
initTexCoordsWithRect(rect)方法,通过纹理更新每个粒子在的UV坐标。
该方法2个使用位置:
设置粒子的纹理时,使用setTexture方法,需要重新设置新纹理的UV坐标。
重新设置粒子最大数时,使用setTotalParticles方法,因为粒子总数发生改变,需要重新初始化顶点缓存和索引缓存,需要重新设置顶点缓存内的UV坐标。
该方法要求传入的参数rect是根据纹理坐标系(Texture coordinates,OpenGL坐标系)表示的,而不能是像素坐标系(Pixel coordinates)。
纹理坐标系(OpenGL坐标系)左下角为原点(0,0);像素坐标系是图片数据原始的坐标系,左上角为原点(0,0)。
接下来通过计算,得出矩形四个顶点的UV坐标。此时的UV坐标需要存入顶点缓存中,而顶点缓存是直接面向GPU的,所以不采用纹理OpenGL坐标系,而是像素坐标系。使用像素坐标系的结果是顶部的坐标值为0,与底部的坐标值交换了。
该方法最终向顶点缓存中存入一个矩形的4个顶点像素坐标系下的UV坐标:
for(unsigned int i=start; i<end; i++) { // bottom-left vertex: quads[i].bl.texCoords.u = left; quads[i].bl.texCoords.v = bottom; // bottom-right vertex: quads[i].br.texCoords.u = right; quads[i].br.texCoords.v = bottom; // top-left vertex: quads[i].tl.texCoords.u = left; quads[i].tl.texCoords.v = top; // top-right vertex: quads[i].tr.texCoords.u = right; quads[i].tr.texCoords.v = top; }
3. updateParticleQuads()
该方法在ParticleSystem的每帧update最后执行。
在ParticleSystem的中,该方法为空,调用的是ParticleSystemQuad的该方法。
update方法在updateParticleQuads之前是把本帧的粒子数据修改到ParticleData中,之后执行该方法,用来把ParticleData中生存的粒子数据写到顶点缓存中,是对位置和颜色分别在顶点缓存进行更新。
把顶点坐标写入顶点缓存前,根据3种粒子位置类型计算当前粒子位置,之后执行updatePosWithParticle方法写入顶点缓存。该方法通过位置坐标、旋转角度、矩形大小,计算出矩形4个顶点坐标,存入顶点缓存中。
存入顶点缓存的坐标是像素坐标系的坐标,所以updatePosWithParticle方法会将旋转角度取反。
4. 其它
ParticleSystemQuad重写了Node的draw方法,使用了顶点缓存和索引缓存。
initWithTotalParticles方法调用setupVBO或setupVBOandVAO方法加载VBO VAO。
本文原创地址:https://www.cnblogs.com/deepcho/ ,如果您在非本网址看到此文章,说明网站是爬虫采集抄袭而成。