一般提取的是边缘、角,文理等。传统的图像特征提取一般分为三个步骤:预处理、特征提取、特征处理;然后在利用机器学习等方法对特征进行分类等操作。
预处理:预处理的目的主要是排除干扰因素,突出特征信息。主要的方法有:图片标准化(调整图片尺寸);图片归一化(调整图片重心为0)。
特征提取:利用特殊的特征提取子对图像进行特征提取,主要有:Harris、SIFT、SURF、LBF、HOG、DPM、ORB。
特征处理:主要目的是为了排除信息量小的特征,减少计算量等:常见的特征处理方法是降维,常见的降维方法有:主成分分析、奇异值分解、线性判别分析;
1、Scale-invarialt feature transform(SIFT):尺度不变特征变换
在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出、不会因光照、仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。详情可参考这。
1.1 优点
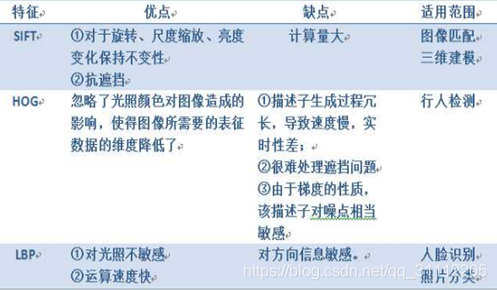
(1)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
(2)独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
(3)多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
(4)高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
(5)可扩展性,可以很方便的与其他形式的特征向量进行联合;
(6)需要较少的经验主义知识,易于开发。
1.2 缺点
- 实时性不高,因为要不断地要进行下采样和插值等操作;
- 有时特征点较少(比如模糊图像);
- 对边缘光滑的目标无法准确提取特征(比如边缘平滑的图像,检测出的特征点过少,对圆更是无能为力)。
1.3 可以解决的问题及改进
目标的自身状态、场景所处的环境和成像器材的成像特性等因素影响图像配准/目标识别跟踪的性能。而SIFT算法在一定程度上可解决:
- 目标的旋转、缩放、平移(RST)
- 图像仿射/投影变换(视点viewpoint)
- 光照影响(illumination)
- 目标遮挡(occlusion)
- 杂物场景(clutter)
- 噪声
近来不断有人改进,其中最著名的有 SURF(计算量小,运算速度快,提取的特征点几乎与SIFT相同)和 CSIFT(彩色尺度特征不变变换,顾名思义,可以解决基于彩色图像的SIFT问题)。
2、Speeded Up Robust Features(SURF)
Sift算法的优点是特征稳定,对旋转、尺度变换、亮度保持不变性,对视角变换、噪声也有一定程度的稳定性;缺点是实时性不高,并且对于边缘光滑目标的特征点提取能力较弱。Surf改进了特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述。Surf在执行效率上有两大制胜法宝——一个是积分图在Hessian(黑塞矩阵)上的使用,一个是降维的特征描述子的使用。
3、Histogram of Oriented Gradient(Hog):方向梯度直方图
通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。
3.1 特点
(1)由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。
(2)在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果。因此HOG特征是特别适合于做图像中的人体检测的。
3.2 SIFT和HOG的比较
共同点:都是基于图像中梯度方向直方图的特征提取方法
不同点:SIFT 特征通常与使用SIFT检测器得到的兴趣点一起使用。这些兴趣点与一个特定的方向和尺度相关联。通常是在对一个图像中的方形区域通过相应的方向和尺度变换后,再计算该区域的SIFT特征。
HOG特征的单元大小较小,故可以保留一定的空间分辨率,同时归一化操作使该特征对局部对比度变化不敏感。
结合SIFT和HOG方法,可以发现SIFT对于复杂环境下物体的特征提取具有良好的特性;而HOG对于刚性物体的特征提取具有良好的特性。
在自然场景分类中,可以发现SIFT的准确率比HOG高,而如果检测像人这种目标,HOG的表现要比SIFT好。
4、Oriented FAST and Rotated BRIEF(ORB)
ORB特征描述算法的运行时间远优于SIFT与SURF,可用于实时性特征检测。ORB特征基于FAST角点的特征点检测与描述技术,具有尺度与旋转不变性,同时对噪声及透视仿射也具有不变性,良好的性能使得用ORB在进行特征描述时的应用场景十分广泛。详细细节可以参考这个和这个。
方向FAST特征点检测:FAST角点检测是一种基于机器学习的快速角点特征检测算法,具有方向的FAST特征点检测是对兴趣点所在圆周上的16个像素点进行判断,若判断后的当前中心像素点为暗或亮,将候定其是否为角点。FAST角点检测计算的时间复杂度小,检测效果突出。FAST角点检测为加速算法实现,通常先对回周上的点集进行排序,排序使得其计算过程大大得到了优化。FAST对多尺度特性的描述是还是通过建立图像金字塔实现的,而对于旋转不变性即方向的特征则引入灰度质心法用于描述特征点的方向。
BRIEF特征描述:BRIEF描述子主要是通过随机选取兴趣点周围区域的若干点来组成小兴趣区域,将这些小兴趣区域的灰度二值化并解析成二进制码串,将串特征作为该特征点的描述子,BRIEF描述子选取关键点附近的区域并对每一位比较其强度大小,然后根据图像块中两个二进制点来判断当前关键点编码是0还是1.因为BRIEF描述子的所有编码都是二进制数的,这样就节省了计算机存储空间。
5、Local Binary Pattern(LBP):局部二值模式
LBP是一种描述图像局部纹理的特征算子,具有旋转不变性与灰度不变性等显著优点。LBP特征描述的是一种灰度范围内的图像处理操作技术,针对的是输入源为8位或16位的灰度图像。LBP特征是高效的图像特征分析方法,经过改进与发展已经应用于多个领域之中,特别是人脸识别、表情识别、行人检测领域已经取得了成功。LBP特征将窗口中心点与邻域点的关系进行比较,重新编码形成新特征以消除对外界场景对图像的影响,因此一定程度上解决了复杂场景下(光照变换)特征描述问题。
LBP算法根据窗口领域的不同分为经典LBP和圆形LBP两种。下面分别介绍:
经典LBP:经典LBP算子窗口为3×3的正方形窗口,以窗口中心像素为阈值,将其相邻8领域像素灰度与中心像素值比较,若中心像素值小于周围像素值,则该中心像素位置被标记为1,否则为0(显然这种规则下,对于中心点大于或等于这两种情况,算法无法区分,后续经过改进引入LBP+与LBP-因子用来区分这两种情况)。图像经过这种遍历操作后,图像就被二值化了,每一个窗口中心的8邻域点都可以由8位二进制数来表示,即可产生256种LBP码,这个LBP码值可以用来反映窗口的区域纹理信息。LBP具体在生成的过程中,先将图像划分为若干个子区域,子区域窗口可根据原图像的尺寸进行调整,而不一定非得为3×3的正方形窗口。一般对于512×640的图像,子区域窗口区域选取大小为16×16。
圆形LBP:经典LBP用正方形来描述图像的纹理特征,其缺点是难以满足不同尺寸和频率的需求。Ojala等人对经典LBP进行了改进,提出了将3×3的正方形窗口领域扩展到任意圆形领域。由于圆形LBP采样点在圆形边界上,那么必然会导致部分计算出来的采样点坐标不是整数,因此这里就需要对得到的坐标像素点值进行处理,常用的处理方法是最近邻插值或双线性插值。
5.1 LBP、SHIF和HOG对比