刘天悦 贝壳找房 / 资深工程师

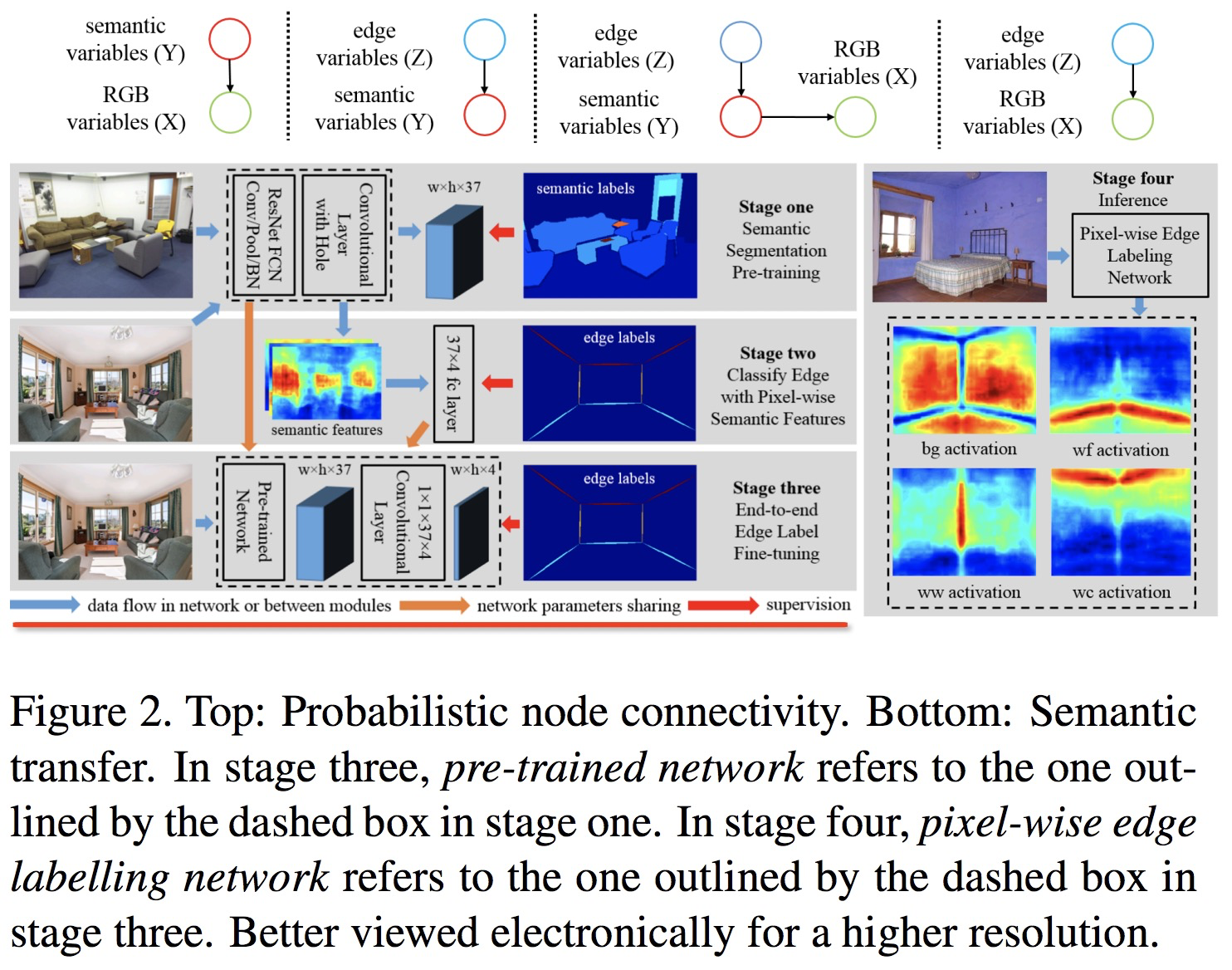
In this paper, we propose an alternative method to estimate room layouts of cluttered indoor scenes. This method enjoys the benefits of two novel techniques. The first one is semantic transfer (ST), which is: (1) a formulation to integrate the relationship between scene clutter and room layout into convolutional neural networks; (2) an architecture that can be end-to-end trained; (3) a practical strategy to initialize weights for very deep networks under unbalanced training data distribution. ST allows us to extract highly robust features under various circumstances, and in order to address the computation redundance hidden in these features we develop a principled and efficient inference scheme named physics inspired optimization (PIO). PIO's basic idea is to formulate some phenomena observed in ST features into mechanics concepts. Evaluations on public datasets LSUN and Hedau show that the proposed method is more accurate than state-of-the-art methods.
语义迁移:
X:原图
Y:semantic 标签
Z:edge 标签
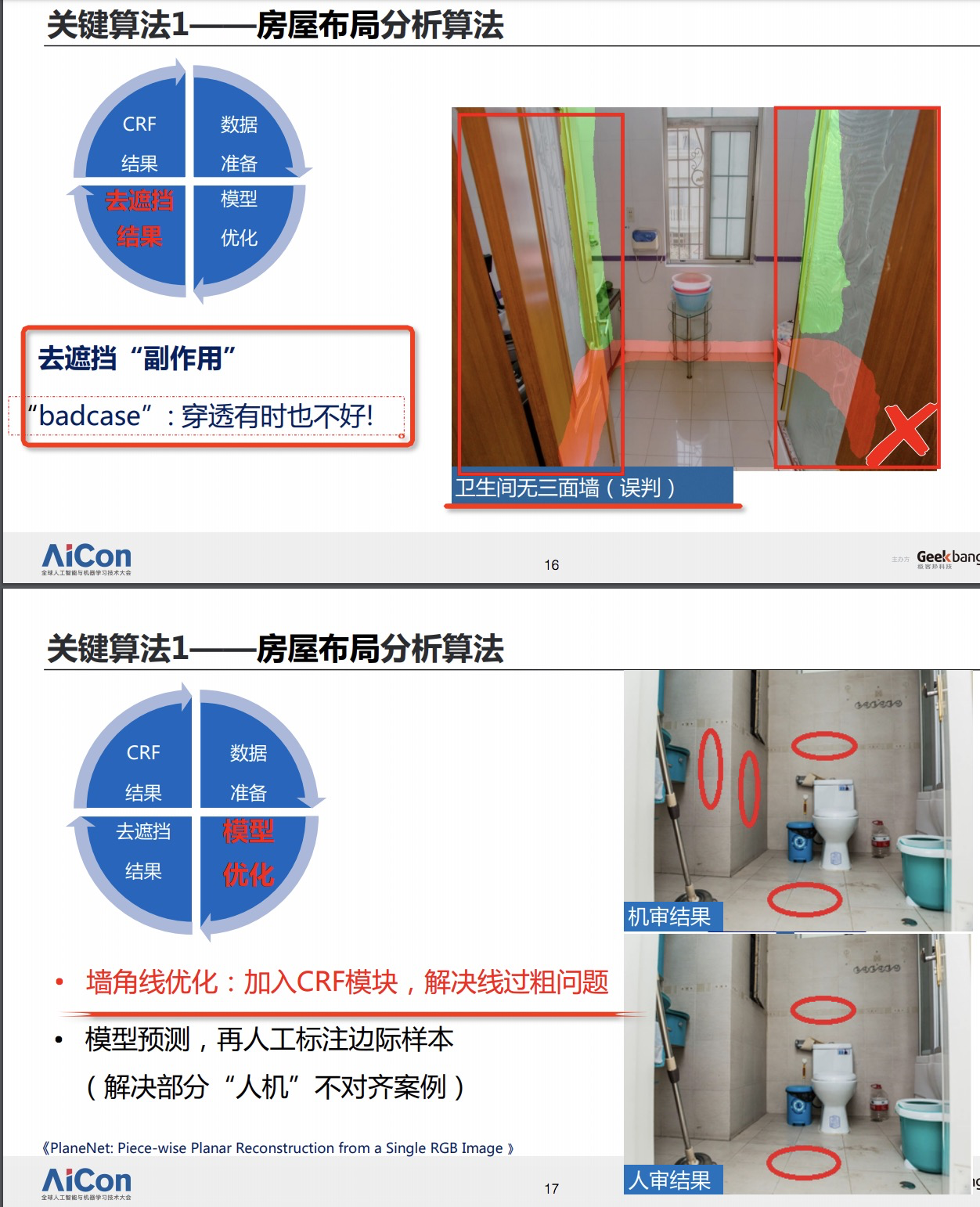
加入透视线的先验判断?
-->果然是这个思路。。。
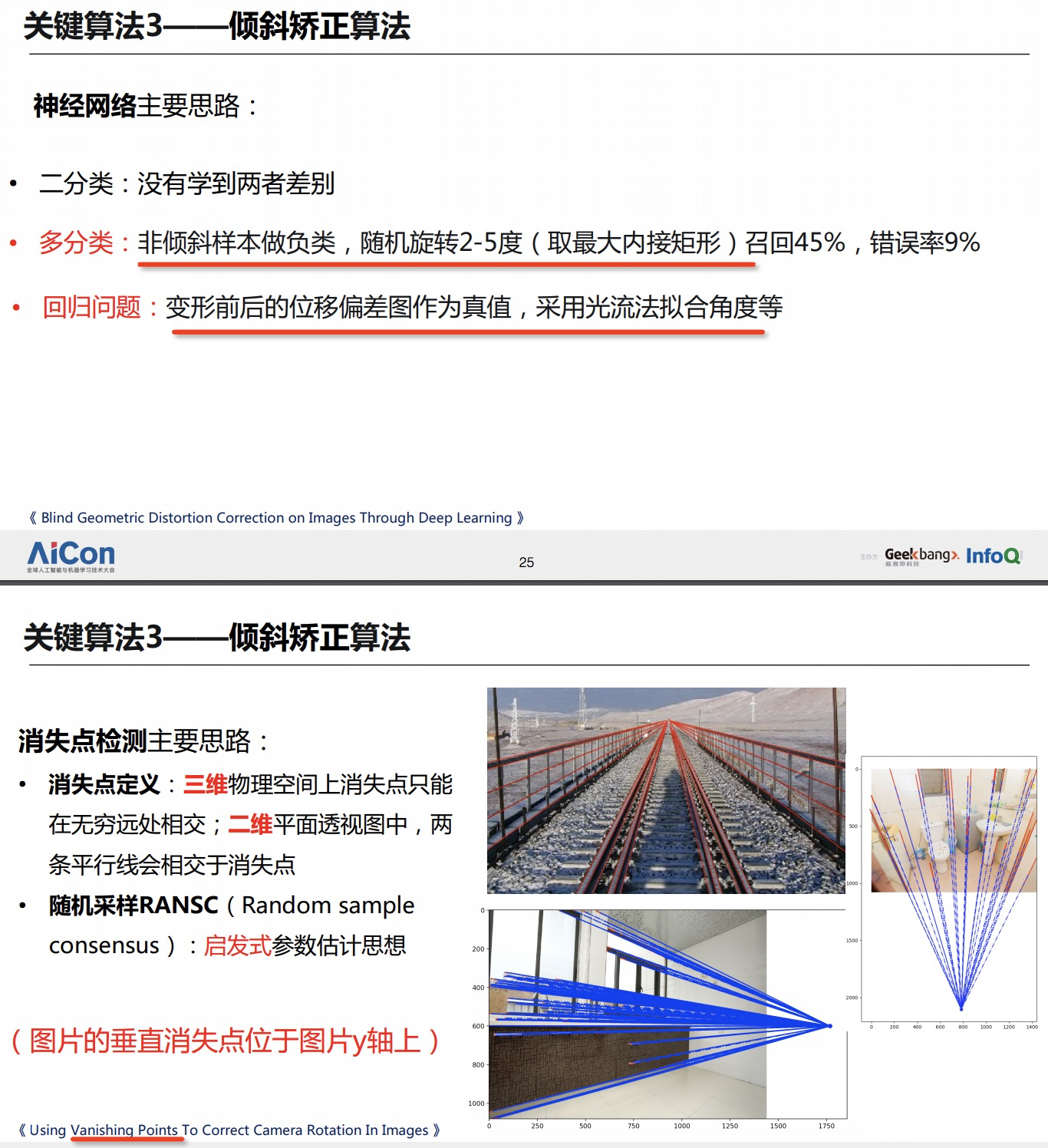
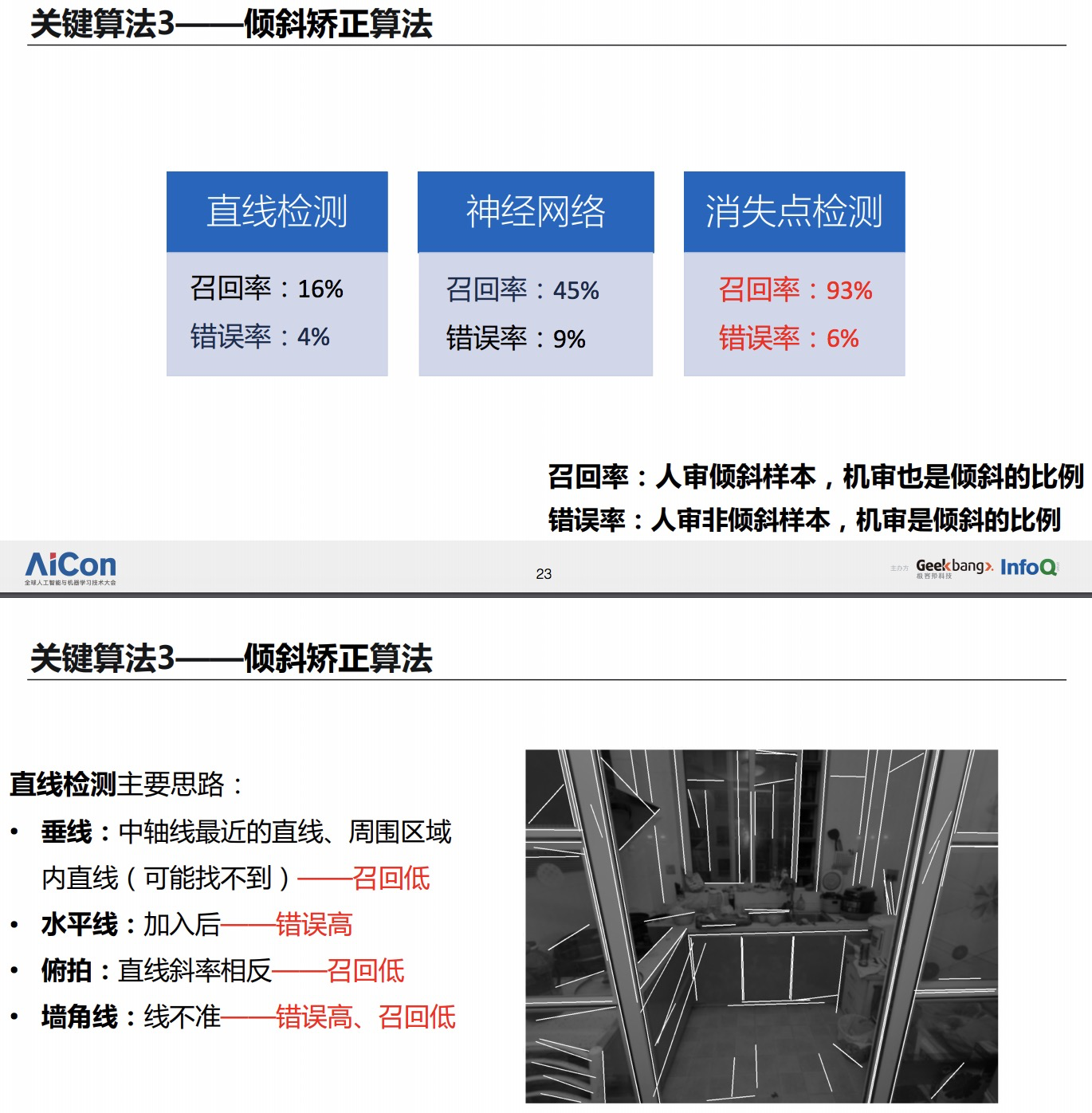
倾斜不倾斜和特征差异在哪?
先识别物体,再(根据多视角几何)定量地把倾斜角度优化出来?
“江苏券”那种倾斜、颠倒的异常情形如何优雅处理?——先把当前图片的vanishing point (也就是主方向)识别出来,再检测物体、或回归时带一个方向角?

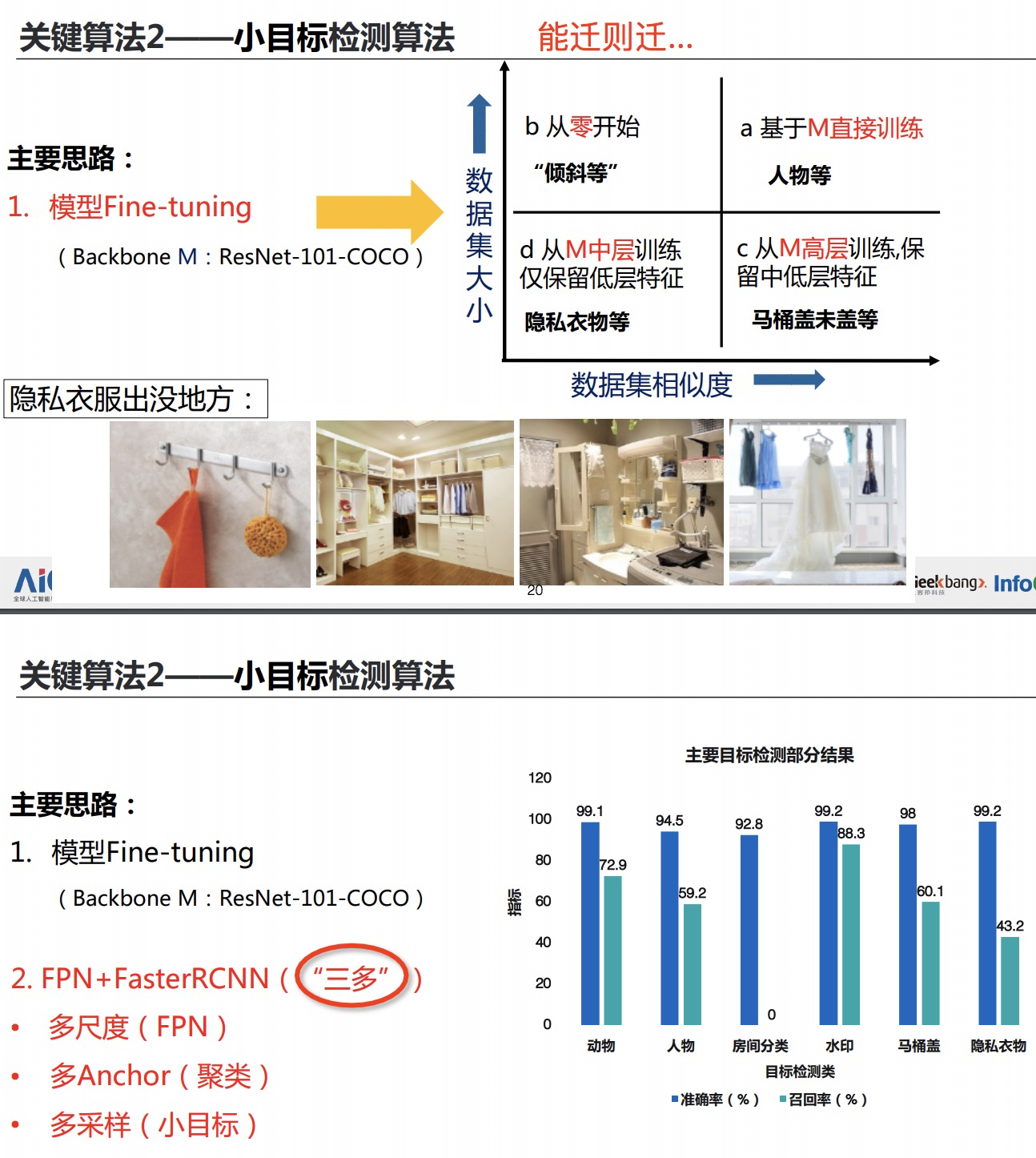
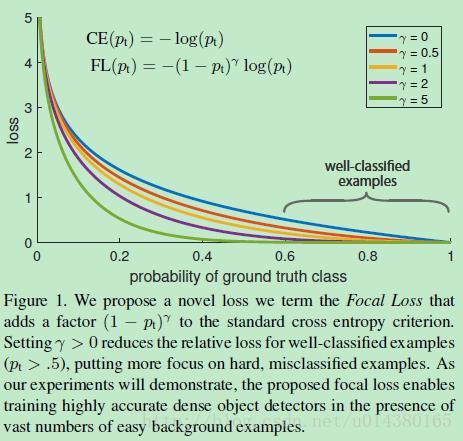
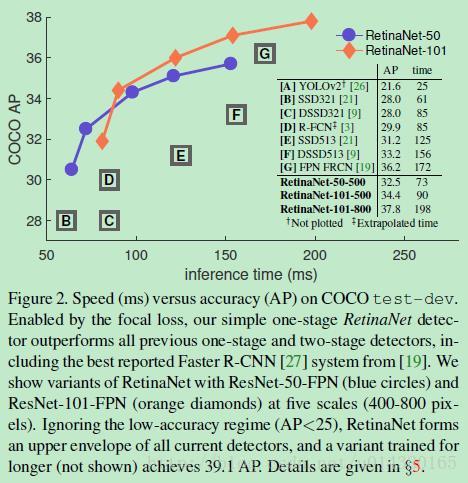
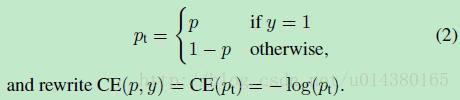
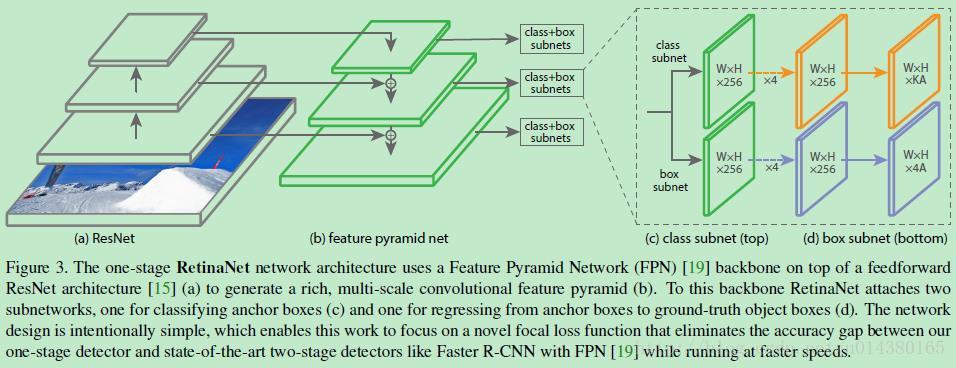
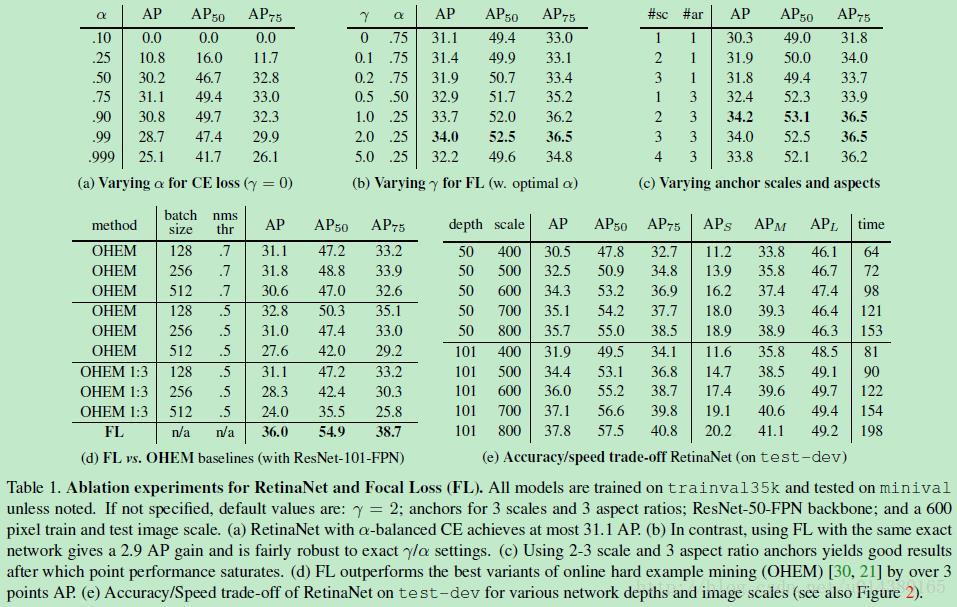
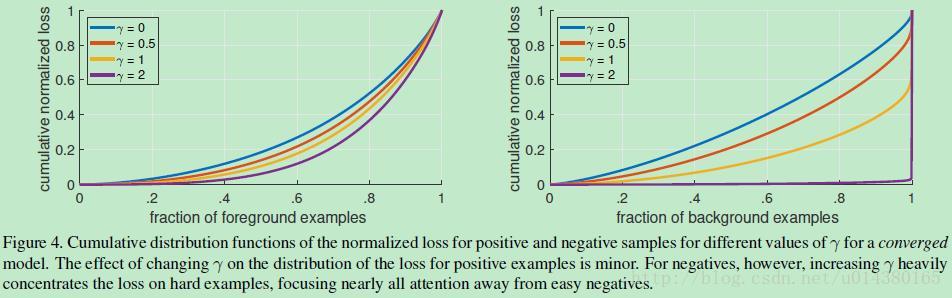
Focal Loss论文:Focal Loss for Dense Object Detection RBG和Kaiming大神的新作。 既然有了出发点,那么就要找one-stage detector的准确率不如two-stage detector的原因,作者认为原因是:样本的类别不均衡导致的。我们知道在object detection领域,一张图像可能生成成千上万的candidate locations,但是其中只有很少一部分是包含object的,这就带来了类别不均衡。那么类别不均衡会带来什么后果呢?引用原文讲的两个后果:(1) training is inefficient as most locations are easy negatives that contribute no useful learning signal; (2) en masse, the easy negatives can overwhelm training and lead to degenerate models. 什么意思呢?负样本数量太大,占总的loss的大部分,而且多是容易分类的,因此使得模型的优化方向并不是我们所希望的那样。其实先前也有一些算法来处理类别不均衡的问题,比如OHEM(online hard example mining),OHEM的主要思想可以用原文的一句话概括:In OHEM each example is scored by its loss, non-maximum suppression (nms) is then applied, and a minibatch is constructed with the highest-loss examples。OHEM算法虽然增加了错分类样本的权重,但是OHEM算法忽略了容易分类的样本。 因此针对类别不均衡问题,作者提出一种新的损失函数:focal loss,这个损失函数是在标准交叉熵损失基础上修改得到的。这个函数可以通过减少易分类样本的权重,使得模型在训练时更专注于难分类的样本。为了证明focal loss的有效性,作者设计了一个dense detector:RetinaNet,并且在训练时采用focal loss训练。实验证明RetinaNet不仅可以达到one-stage detector的速度,也能有two-stage detector的准确率。 focal loss的含义可以看如下Figure1,横坐标是pt,纵坐标是loss。CE(pt)表示标准的交叉熵公式,FL(pt)表示focal loss中用到的改进的交叉熵,可以看出和原来的交叉熵对比多了一个调制系数(modulating factor)。为什么要加上这个调制系数呢?目的是通过减少易分类样本的权重,从而使得模型在训练时更专注于难分类的样本。首先pt的范围是0到1,所以不管γ是多少,这个调制系数都是大于等于0的。易分类的样本再多,你的权重很小,那么对于total loss的共享也就不会太大。那么怎么控制样本权重呢?举个例子,假设一个二分类,样本x1属于类别1的pt=0.9,样本x2属于类别1的pt=0.6,显然前者更可能是类别1,假设γ=1,那么对于pt=0.9,调制系数则为0.1;对于pt=0.6,调制系数则为0.4,这个调制系数就是这个样本对loss的贡献程度,也就是权重,所以难分的样本(pt=0.6)的权重更大。Figure1中γ=0的蓝色曲线就是标准的交叉熵损失。 Figure2是在COCO数据集上几个模型的实验对比结果。可以看看再AP和time的对比下,本文算法和其他one-stage和two-stage检测算法的差别。 看完实验结果和提出算法的出发点,接下来就要介绍focal loss了。在介绍focal loss之前,先来看看交叉熵损失,这里以二分类为例,p表示概率,公式如下: 因为是二分类,所以y的值是正1或负1,p的范围为0到1。当真实label是1,也就是y=1时,假如某个样本x预测为1这个类的概率p=0.6,那么损失就是-log(0.6),注意这个损失是大于等于0的。如果p=0.9,那么损失就是-log(0.9),所以p=0.6的损失要大于p=0.9的损失,这很容易理解。 为了方便,用pt代替p,如下公式2:。这里的pt就是前面Figure1中的横坐标。 接下来介绍一个最基本的对交叉熵的改进,也将作为本文实验的baseline,如下公式3。什么意思呢?增加了一个系数at,跟pt的定义类似,当label=1的时候,at=a;当label=-1的时候,at=1-a,a的范围也是0到1。因此可以通过设定a的值(一般而言假如1这个类的样本数比-1这个类的样本数多很多,那么a会取0到0.5来增加-1这个类的样本的权重)来控制正负样本对总的loss的共享权重。 显然前面的公式3虽然可以控制正负样本的权重,但是没法控制容易分类和难分类样本的权重,于是就有了focal loss: 这里的γ称作focusing parameter,γ>=0。 称为调制系数(modulating factor) 作者在实验中采用的是公式5的focal loss(结合了公式3和公式4,这样既能调整正负样本的权重,又能控制难易分类样本的权重): 在实验中a的选择范围也很广,一般而言当γ增加的时候,a需要减小一点(实验中γ=2,a=0.25的效果最好) 贴一下RetinaNet的结构图:Figure3。因为网络结构不是本文的重点,所以这里就不详细介绍了,感兴趣的可以看论文的第4部分。 实验结果: Figure4是对比forground和background样本在不同γ情况下的累积误差。纵坐标是归一化后的损失,横坐标是总的foreground或background样本数的百分比。可以看出γ的变化对正(forground)样本的累积误差的影响并不大,但是对于负(background)样本的累积误差的影响还是很大的(γ=2时,将近99%的background样本的损失都非常小)。 总结: |
|





引用:
Learning to Draw Sight LinesInternational Journal Of Computer Vision2019