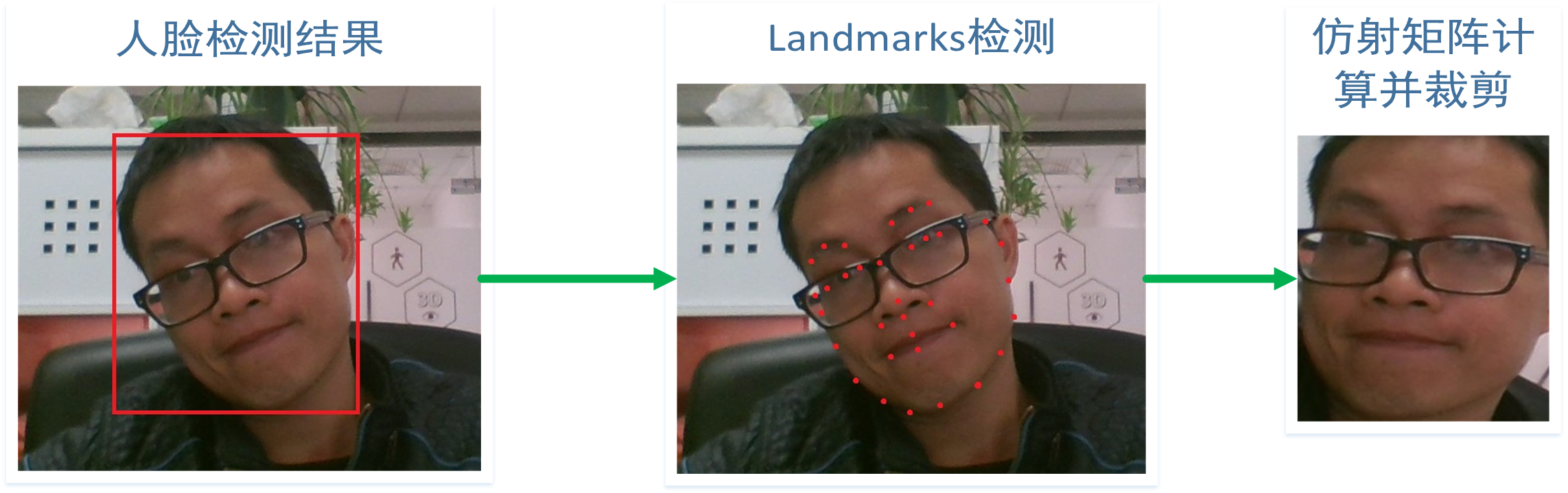
利用Landmarks进行人脸对齐裁剪是人脸检测中重要的一个步骤。效果如下图所示:
基本思路为:
a.人脸检测
人脸的检测不必多说了,基本Cascade的方式已经很不错了,或者用基于HOG/FHOG的SVM/DPM等。这些在OpenCV,DLIB都有。
b.在检测到的人脸上进行Landmarks检测,获得一系列的Landmark点
对齐算法很多,特别是前几年人脸对齐获得了巨大的成功。
[2].人脸对齐SDM原理----Supervised Descent Method and its Applications to Face Alignment
c.利用检测到的Landmarks和模板的Landmarks,计算仿射矩阵H;然后利用H,直接计算得到对齐后的图像。
直接上代码:
#include <opencv2/opencv.hpp> using namespace cv; //原始图像大小 #define IMAGE_WIDTH 640 #define IMAGE_HEIGHT 480 //输出的图像大小(裁剪后的) #define IMAGE_WIDTH_STD 90 #define IMAGE_HEIGHT_STD 90 #define LANDMARK_SIZE 8//对齐点的个数 #define LANDMARK_SIZE_DOUBLE 16//对齐点个数的两倍 Point2f srcTri[LANDMARK_SIZE];//对齐点的Point2f数组,检测到的人脸对齐点,注意这里是基于原始图像的坐标点 Point2f destTri[LANDMARK_SIZE];//对齐点的Point2f数组,模板的Landmarks,注意这是一个基于输出图像大小尺寸的坐标点 //对齐点的double数组 double template_landmark[LANDMARK_SIZE_DOUBLE] = { 0.0792396913815, 0.339223741112, 0.0829219487236, 0.456955367943, 0.0967927109165, 0.575648016728, 0.122141515615, 0.691921601066, 0.168687863544, 0.800341263616, 0.239789390707, 0.895732504778, 0.325662452515, 0.977068762493, 0.422318282013, 1.04329000149, 0.531777802068, 1.06080371126, 0.641296298053, 1.03981924107, 0.738105872266, 0.972268833998, 0.824444363295, 0.889624082279, 0.894792677532, 0.792494155836, 0.939395486253, 0.681546643421, 0.96111933829, 0.562238253072, 0.970579841181, 0.441758925744 }; int main() { VideoCapture vcap; if (!vcap.open(0)) { return 0; } for (int i = 0; i < LANDMARK_SIZE; i++) { srcTri[i] = Point2f(template_landmark[i * 2] * 90 + IMAGE_HEIGHT / 2, template_landmark[i * 2 + 1] * 90 + IMAGE_WIDTH / 2); destTri[i] = Point2f(template_landmark[i * 2] * IMAGE_HEIGHT_STD, template_landmark[i * 2 + 1] * IMAGE_WIDTH_STD); } //Mat warp_mat = getAffineTransform( srcTri, destTri );//使用仿射变换,计算H矩阵 Mat warp_mat = cv::estimateRigidTransform(srcTri, destTri, false);//使用相似变换,不适合使用仿射变换,会导致图像变形 Mat frame; Mat warp_frame(200, 200, CV_8UC3); while (1) { vcap >> frame; warpAffine(frame, warp_frame, warp_mat, warp_frame.size());//裁剪图像 imshow("frame", frame);//显示原图像 imshow("warp_frame", warp_frame);//显示裁剪后得到的图像 waitKey(10); } return 0; }
效果图:
注意以上效果非真实的对齐裁剪的效果。实际的对齐裁剪可以做的很好。