最大最小值滤波
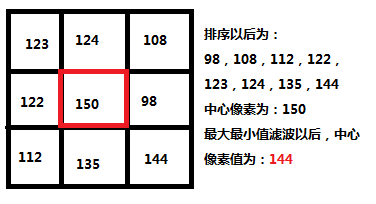
最大最小值滤波是一种比较保守的图像处理手段,与中值滤波类似,首先要排序周围像素和中心像素值,然后将中心像素值与最小和最大像素值比较,如果比最小值小,则替换中心像素为最小值,如果中心像素比最大值大,则替换中心像素为最大值。一个Kernel矩阵为3X3的最大最小值滤波如下:
//最大最小值滤波
function maxMin(imgData, size) {
pixelData = tmppixelData = imgData.data,
size = size || 3;
for (var i = 0; i < canvas.height; i++) {
for (var j = 0; j < canvas.width; j++) {
var tempR = [],
tempG = [],
tempB = [];
for (var dx = 0; dx < size; dx++) {
for (var dy = 0; dy < size; dy++) {
var x = i + dx;
var y = j + dy;
var p = x * canvas.width + y;
if (!(dx == ~~(size / 2) && dy == ~~(size / 2))) {
tempR.push(tmppixelData[p * 4 + 0])
tempG.push(tmppixelData[p * 4 + 1])
tempB.push(tmppixelData[p * 4 + 2])
}
}
}
tempR.sort();
tempG.sort();
tempB.sort();
var p = i * canvas.width + j;
pixelData[p * 4 + 0] = tmppixelData[p * 4 + 0] > tempR[tempR.length - 1] ? tempR[tempR.length - 1] : tmppixelData[p * 4 + 0] < tempR[0] ? tempR[0] : tmppixelData[p * 4 + 0];
pixelData[p * 4 + 1] = tmppixelData[p * 4 + 1] > tempG[tempG.length - 1] ? tempG[tempG.length - 1] : tmppixelData[p * 4 + 1] < tempG[0] ? tempG[0] : tmppixelData[p * 4 + 1];
pixelData[p * 4 + 2] = tmppixelData[p * 4 + 2] > tempB[tempB.length - 1] ? tempB[tempB.length - 1] : tmppixelData[p * 4 + 2] < tempB[0] ? tempB[0] : tmppixelData[p * 4 + 2];
}
}
imgData.data = pixelData;
return imgData;
}