制作Dockerfile为Docker入门学习的第一步,dockerfile有以下参数
参数
FROM
功能为指定基础镜像,并且必须是第一条指令。如果不以任何镜像为基础,那么写法为:FROM scratch。同时意味着接下来所写的指令将作为镜像的第一层开始 。 三种写法,其中<tag>和<digest> 是可选项,如果没有选择,那么默认值为latest
语法:
FROM <image>
FROM <image>:<tag>
FROM <image>:<digest>
MAINTAINER
作者
RUN
运行指定的命令
语法:
1. RUN <command> #后面直接跟shell命令
2. RUN ["executable", "param1", "param2"] # 可将executable理解成为可执行文件,后面就是两个参数
举例:
1.RUN /bin/bash -c 'source $HOME/.bashrc; echo $HOME
2.RUN ["/bin/bash", "-c", "echo hello"]
注意:多行命令不要写多个RUN,原因是Dockerfile中每一个指令都会建立一层.多少个RUN就构建了多少层镜像,会造成镜像的臃肿、多层,不仅仅增加了构件部署的时间,还容易出错。
CMD
容器启动时要运行的命令
语法:
1. CMD ["executable","param1","param2"]
2. CMD ["param1","param2"]
3. CMD command param1 param2
第三种比较好理解了,就时shell这种执行方式和写法。第一种和第二种其实都是可执行文件加上参数的形式
举例:
1.CMD [ "sh", "-c", "echo $HOME"
2.CMD [ "echo", "$HOME" ]
LABEL
功能是为镜像指定标签,这个没用过,回头再看吧
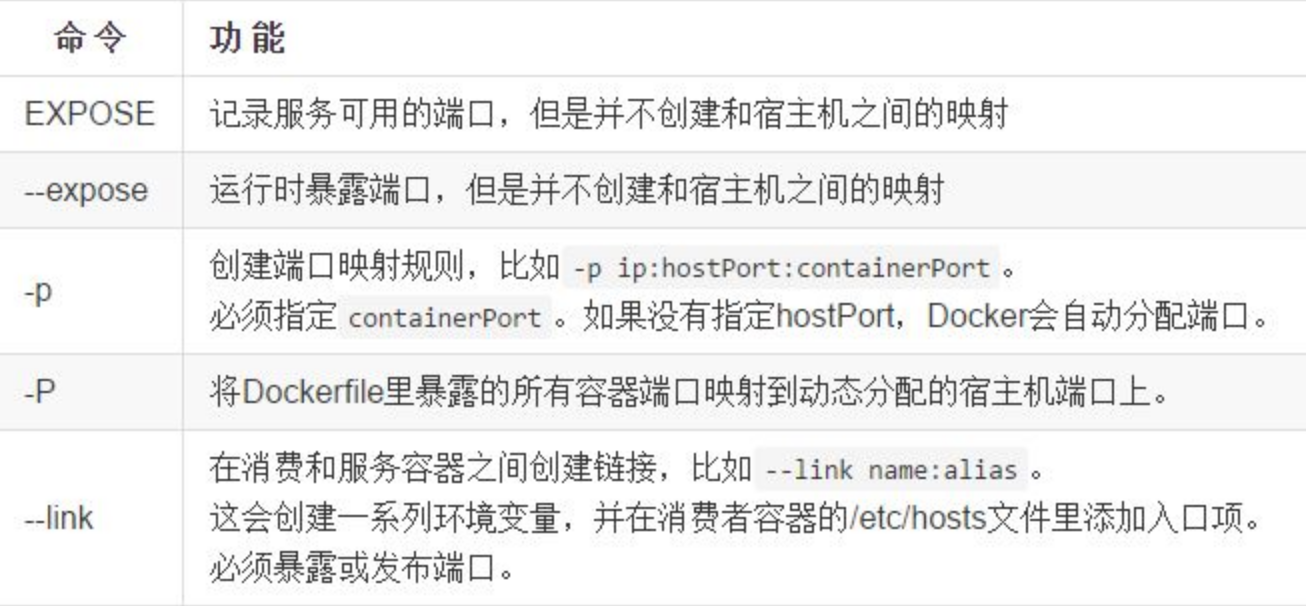
EXPOSE
记录服务可用的端口,但是并不创建和宿主机之间的映射
举个例子:
写一个dockerfile:
FROM 192.168.1.1:5000/centos
MAINTAINER liyang
RUN XXXX
EXPOSE 8080
EXPOSE 22
EXPOSE 8009
EXPOSE 8005
EXPOSE 8443
在Dockerfile中定义了 tomcat 的四个端口和ssh 22 端口,并且构建该配置档为镜像文件,镜像名为 port_list
#docker build -t port_list .
构建成功后运行该 images,注意在容器运行的时候一定要加-P ,大写的P
#docker run -d -it -P --name port_list_container port_list
Container已经running,分别映射端口为(22,8005,8009,8443,8080)映射到本机中的(32775,32776,32777,32773,32774)

ENV
设置环境变量
语法:
1. ENV <key> <value>
2. ENV <key>=<value> ...
两者的区别就是第一种是一次设置一个,第二种是一次设置多个
ADD
一个复制命令,把文件复制到镜像中
1. ADD <src>... <dest>
2. ADD ["<src>",... "<dest>"]
<dest>路径的填写可以是容器内的绝对路径,也可以是相对于工作目录的相对路径
<src>可以是一个本地文件或者是一个本地压缩文件,还可以是一个url , 如果把<src>写成一个url,那么ADD就类似于wget命令
COPY
复制指令
语法:
1. COPY <src>... <dest>
2. COPY ["<src>",... "<dest>"]
COPY的<src>只能是本地文件,其他用法和ADD一致
ENTRYPOINT
容器启动时的默认命令
语法:
1. ENTRYPOINT ["executable", "param1", "param2"]
2. ENTRYPOINT command param1 param2
与CMD比较说明(这俩命令太像了,而且还可以配合使用):
1. 相同点:
-
只能写一条,如果写了多条,那么只有最后一条生效
-
容器启动时才运行,运行时机相同
2. 不同点:
-
ENTRYPOINT不会被运行的command覆盖,而CMD则会被覆盖
-
如果我们在Dockerfile种同时写了ENTRYPOINT和CMD,并且CMD指令不是一个完整的可执行命令,那么CMD指定的内容将会作为ENTRYPOINT的参数
FROM ubuntu
ENTRYPOINT ["top", "-b"]
CMD ["-c"]
- 如果我们在Dockerfile种同时写了ENTRYPOINT和CMD,并且CMD是一个完整的指令,那么它们两个会互相覆盖,谁在最后谁生效
FROM ubuntu
ENTRYPOINT ["top", "-b"]
CMD ls -al 那么将执行ls -al ,top -b不会执行。
CMD指定的命令可以被docker run传递的命令覆盖,例如,如果用CMD指定:
...
CMD ["echo"]
然后运行
docker run CONTAINER_NAME echo foo
那么CMD里指定的echo会被新指定的echo覆盖,所以最终相当于运行echo foo,所以最终打印出的结果就是:
foo
而ENTRYPOINT会把容器名后面的所有内容都当成参数传递给其指定的命令(不会对命令覆盖),比如:
...
ENTRYPOINT ["echo"]
然后运行
docker run CONTAINER_NAME echo foo
则CONTAINER_NAME后面的echo foo都作为参数传递给ENTRYPOING里指定的echo命令了,所以相当于执行了
echo "echo foo"
最终打印出的结果就是:
echo foo
另外,在Dockerfile中,ENTRYPOINT指定的参数比运行docker run时指定的参数更靠前,比如:
...
ENTRYPOINT ["echo", "foo"]
执行
docker run CONTAINER_NAME bar
相当于执行了:
echo foo bar
VOLUME
可实现挂载功能,可以将本地文件夹或者其他容器中得文件夹挂在到这个容器中
语法:
VOLUME /var/log /var/db
USER
设置启动容器的用户,可以是用户名或UID,所以,只有下面的两种写法是正确的
语法:
USER daemo
USER UID
注意:如果设置了容器以daemon用户去运行,那么RUN, CMD 和 ENTRYPOINT 都会以这个用户去运行
WORKDIR
设置工作目录
语法:
WORKDIR /path/to/workdir
设置工作目录,对RUN,CMD,ENTRYPOINT,COPY,ADD生效。如果不存在则会创建,也可以设置多次。
ARG
没用过
ONBUILD
STOPSIGNAL
STOPSIGNAL命令是的作用是当容器推出时给系统发送什么样的指令
语法:
STOPSIGNAL signal
HEALTHCHECK
容器健康状况检查命令
语法有两种:
1. HEALTHCHECK [OPTIONS] CMD command
2. HEALTHCHECK NONE
第一个的功能是在容器内部运行一个命令来检查容器的健康状况
第二个的功能是在基础镜像中取消健康检查命令
[OPTIONS]的选项支持以下三中选项:
--interval=DURATION 两次检查默认的时间间隔为30秒
--timeout=DURATION 健康检查命令运行超时时长,默认30秒
--retries=N 当连续失败指定次数后,则容器被认为是不健康的,状态为unhealthy,默认次数是3
注意:
HEALTHCHECK命令只能出现一次,如果出现了多次,只有最后一个生效。
CMD后边的命令的返回值决定了本次健康检查是否成功,具体的返回值如下:
0: success - 表示容器是健康的
1: unhealthy - 表示容器已经不能工作了
2: reserved - 保留值
例子:
HEALTHCHECK --interval=5m --timeout=3s
CMD curl -f http://localhost/ || exit 1
健康检查命令是:curl -f http://localhost/ || exit 1
两次检查的间隔时间是5秒
优化
1.ADD和VOLUME尽量放在dockerfile底部
2.多个RUN的时候可以通过&& 和 集合成一条指令,减少容器层数
3.能用COPY的地方就不要用RUN cp
4.dockerfile当前目录最好不要放无关文件