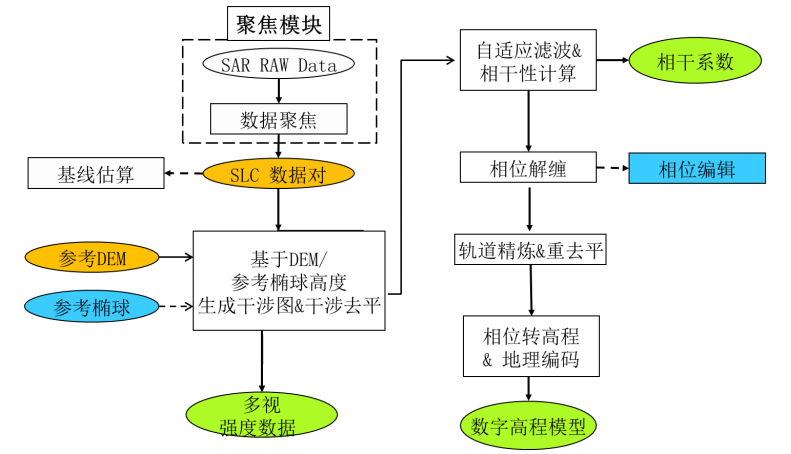
1.SARscape 的 InSAR 技术获取 DEM 的操作流程图
2.数据聚焦
由于给定的数据是***H1.0_A格式(ALOS PALSAR Level1.0,即未经处理的原始信号产品,附带辐射与几何纠正参数。),所以先进行数据聚焦处理。
(SARsacpe 的聚焦模块,可以对原始数据中每个点的反射率利用经过优化的调焦算法实现数据快速聚焦处理,直接输出 SLC 数据,并支持聚焦前对 RAW 数据的镶嵌)
3.DEM数据格式转换
由于下载的DEM数据是TIFF格式的SARSCAPE下需要的是_DEM格式,这就需要DEM进行格式转换。
在ENVI classic,选择Mosaicking--->Georeferenced,把DEM数据导进去镶嵌,然后点击apply生成拼接的DEM,这里生成的DEM是ENVI的标准格式。

然后选择SARSCAPE/Import Data/ENVI original,将输出文件名后缀*_bil改为*_dem就可以了。Data Units选择DEM,点击start执行。就可以生成SARSCAPE所需要的_DEM数据。
【如果只有一景tiff,则可选择SARSCAPE/Import Data/Generic Format/TIFF,将输出文件名后缀*_bil改为*_dem,Data Units选择DEM,点击start执行】
4.基线估算
用来评价干涉像对的质量,计算基线、轨道偏移(距离向和方位向)和其他系统参数。只有在获得的地面反射至少有两个天线重叠的时候才可以产生干涉,当基线垂直分量超过了临界值的时候,没有位相信息,相干性丢失,就无法做干涉。
选择/SARscape/Interferometry/Interferometric Tools/Baseline Estimation
5.干涉图生成
选 择 /SARscape/Interferometry/Phase Processing/1 - InterferogramGeneration,输入两期 SLC 数据。Optional Files 面板默认不设置。
处理完成后,弹出 end 对话框,点击确定。查看输出路径下的结果,得到主从影像的强度图:_pwr、干涉图:_int、去平后的干涉图:_dint、合成相位:_sint、 以及斜距 DEM:_srdem。 每个结果都相应地生成了 TIF 格式的文件,便于直接查看。如下就是_dint 和_int 的结果。
6.自适应滤波及相干性计算
从SAR数据中生成的干涉图往往会有一些噪声,可通过空间滤波的方式去掉由平地干涉引起的位相噪声。同时生成干涉的相干图(描述位相质量)和滤波后的主影像强度图。
双击SARscape/Interferometry/Phase Processing/2 - Adaptive Filter and Coherence Generation 
这一步生成的结果有:滤波后的干涉图:_fint、相干系数图:_cc。在 ENVI 中显示了相干系数图_cc,点击 查看像元值,相干性系数分布在 0-1,值越大说明该区域的相干性越高,值越小,相干性越低,表明该区域在两个时相上发生了变化。
##SARscape中干涉图主要滤波 - Adaptive:这种方法适用于高分辨率的数据(如TerraSAR-X或COSMO-SkyMed)
- Boxcar:使用局部干涉条纹的频率来优化滤波器,该方法尽可能的保留了微小的干涉条纹。
- Goldstein:这种滤波方法的滤波器是可变的,提高了干涉条纹的清晰度、减少了由空间基线或时间基线引起的失相干的噪声。这种方法是最常用的方法。
7.相位解缠
干涉相位只能以 2π为模,所以只要相位变化超过了 2π,就会重新开始和循环。相位解缠是对去平和滤波后的位相进行相位解缠,解决 2π 模糊的问题。
双击/SARscape/Interferometry/Phase Processing/3 - Phase Unwrapping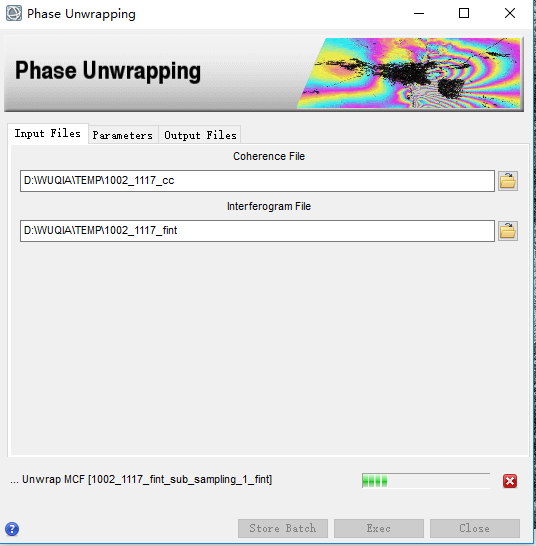
## SARscape中主要提供了三种解缠方法(Unwrapping Method Type):
- 区域增长法(Region Growing):选这种方法,则不要设置过高的相干性阈值(0.15-0.2是比较好的)以便留下足够的自由增长空间,相位突变部分在解缠后的图像上以解缠孤岛存在,这种方法降低了由相位突变引起的误差。
- 最小费用流(Minimum Cost Flow):默认的解缠方法,当有大面积的低相干或是其他限制增长的因素而使解缠困难时,最小费用流算法可以取得比区域增长法更好的结果。这种方法采用正方形的格网,考虑了图像上所有的像元,对相干性小于阈值的像元做了掩膜处理。
- Delaunay MCF:和最小费用流法的不同在于,这种方法不是考虑了图像上所有的像元,而是仅考虑了相干性大于阈值的部分,而且不是用正方形的格网而是用了德罗尼三角形格网。只有对相干性高的部分进行解缠,不受低相干像元的影响。对于有大量相干性低的地物存在的时候,如影像上存在大量水体、浓密植被等,推荐使用该方法,最小化相位突变的影响。
8.轨道精炼和重去平
当输入精确的轨道信息,为了矫正相位偏移,所以要进行轨道参数的修正,矫正的结果不会生成新的数据文件,而是将解缠图像头文件中的信息做了修正。
选择/SARscape/Interferometry/Phase Processing/4 - Refinement and Reflattening
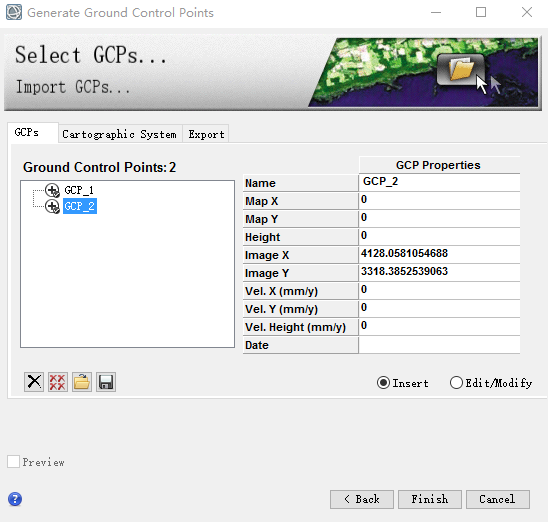
用SARscape做干涉处理时(InSAR/DInSAR),在轨道精炼的一步,必须输入控制点文件(refinement GCP file),用于修正干涉相位和解缠后的相位。
点击 按钮可启动控制点选择工具。在生成GCP工具的在文件选择面板,输入三个文件,分别是:_upha、_dem和_fint。
按钮可启动控制点选择工具。在生成GCP工具的在文件选择面板,输入三个文件,分别是:_upha、_dem和_fint。
用于轨道精炼的控制点一般遵循以下几个原则:
-
不能位于高频的残余地形相位上
-
不能位于形变相位上,要远离形变区域,控制点的被认为是形变为0的点
-
不能位于解缠错误的相位跃变上(phase jump)
-
如果fint上存在规律的几何误差,如轨道条纹,GCP在满足上述条件的前提下,分布于整个图像,从而去除规律的相位误差
下面分不同情况来说明控制点选择的建议。
如果是InSAR测量DEM,在整个图像中选择几个控制点用于去除系统的几何误差(轨道误差),GCP要远离陡峭的地形区域和残余地形相位,当地形起伏大的山区,最好是选择山谷底部的平地区域。
如果DInSAR测量地表形变时,在没有轨道误差的情况下,远离形变区域的位置选择一个GCP点就可以。
做InSAR测量地形或者DInSAR测量地表形变时,如果存在轨道误差的情况下,需要选择多个GCP点,作为稳定的参考点,程序从这些点中计算出误差相位从而去除。
不论什么情况,在选择GCP之前,确定处理区域没有解缠错误的相位,也就是相位跃变的情况。
有时候为了比较结果,会对同一区域用不同的观测几何的数据对进行处理,即升轨数据对和降轨数据对。这种情况下,GCP最好使用同一组,这样可以减少两个图像之间的相位误差,方法是:对两个数据对的去平后干涉图_fint进行地理编码,在地理坐标的图上选择GCP点。
最后,有两个注意事项:(1)如果要选择子区域的话,最好选择比研究区大一些的区域,以保证除了形变区域以外还存在稳定区域用于选择控制点。(2)轨道精炼的方法有轨道优化和多项式优化两种。如果选择轨道优化的方法,至少需要7个控制点,否则,会自动改为多项式优化,控制点最少为多项式系数(Residual Phase Poly Degree),否则,多项式系数会自动减少。
9.相位高程转换——生成 DEM
这一步是将经过绝对校准和解缠的实际相位,结合合成相位,转换为 DEM 并进行地理编码。生成进行了地理编码的 DEM 文件、相干图像,图像精度图像和分辨率图像。
选择/SARscape/Interferometry/Phase Processing/5A - Phase to Height Conversion and Geocoding


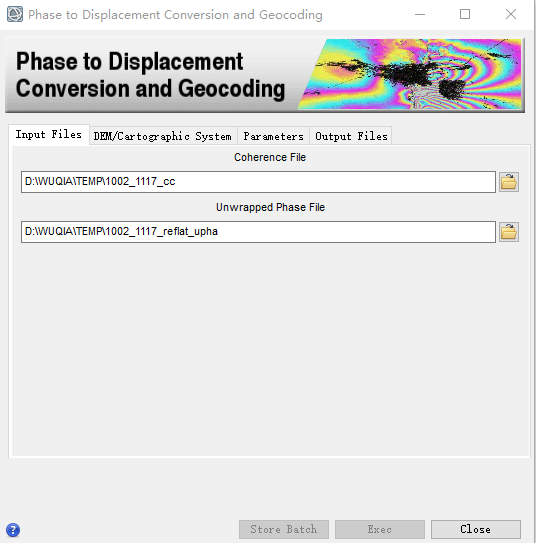
10.相位转形变以及地理编码
经过绝对校准和解缠的相位,结合合成相位,转换为形变数据以及地理编码到制图坐标系统,默认得到的是 LOS 方向的形变。
选择/SARscape/Interferometry/Phase Processing/5B - Phase to Displacement Conversion and Geocoding