问题描述:使用SVM(支持向量机 )实现一个垃圾邮件分类器。
在开始之前,先简单介绍一下SVM
①从逻辑回归的 cost function 到SVM 的 cost function
逻辑回归的假设函数如下:

hθ(x)取值范围为[0,1],约定hθ(x)>=0.5,也即θT·x >=0时,y=1;比如hθ(x)=0.6,此时表示有60%的概率相信 y 等于1
显然,要想让y取值为1,hθ(x)越大越好,因为hθ(x)越大,y 取值为1的概率也就越大,也即:更好把握相信 y 等于1。而要想hθ(x)越大,也就是θT·x远远大于0
The larger θT
·x is, the larger also is hθ
(x) = p(y = 1|x; w, b), and thus also the higher our degree of “confidence” that the label is 1
同理,y 等于0,也可以通过类似的推理得到:要想让 y 取值为0,则hθ(x)越小越好,而要想hθ(x)越小,也就是θT·x远远小于0
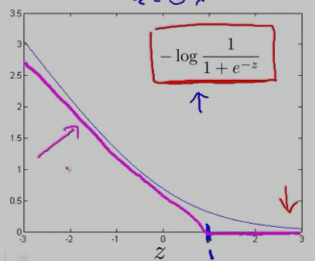
逻辑回归的代价函数(cost function)如下:(为了方便讨论,假设 training examples 只有一个,即:m = 1)

从上面的cost function公式 可以看出:当y==0时,只有右边的那部分式子起作用;当y==1时,(1-y==0)只有左边的那部分式子起作用。
y==1时,逻辑回归的代价函数的图形表示如下:可以看出,逻辑回归的代价函数在整个坐标轴上是连续的。

在上面的y==1时的逻辑回归代价函数的基础上,构造一条新的代价函数曲线,记为cost1(z) ,(用紫色的两条直线 线段表示,z==1处是转折点),如下图:在z==1 点,新的代价函数是不连续的。
同理,y==0时,逻辑回归的代价函数的图形表示如下图:可以看出,逻辑回归的代价函数在整个坐标轴上是连续的。

在上面的y==0时的逻辑回归代价函数的基础上,构造一条新的代价函数曲线,记为cost0(z)(用紫色的两条直线 线段表示,z== -1处是转折点),如下图:在z== -1 点,新的代价函数是不连续的。

使用上面新构造的两条函数曲线:cost0(z) 和 cost1(z) (z 等于θT·x),组成了支持向量机(SVM)的cost function,如下:

对于training example的数目 m 而言,它是一个常量,故在SVM的cost function中 去掉了 m
因此,总结一下,得到SVM的代价函数如下:
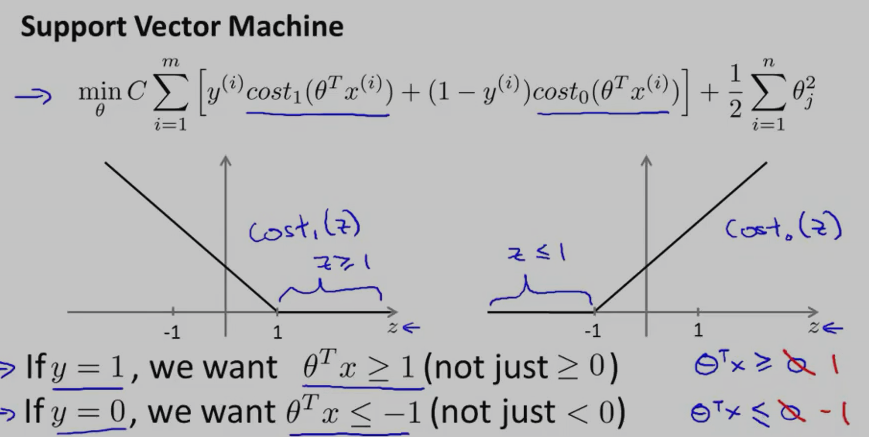
对于SVM而言,y==1时,要求:θT·x>=1;y==0时,要求:θT·x<=-1
可以看出:相比于逻辑回归,SVM中的 label of result y 等于 1 时,要求θT·x大于等于1,而不是0,这就相当于多了提高了限制条件,多了一层保障。
另外,SVM的代价函数中的 参数 C 就相当于逻辑回归中的lambda(λ)

因为,我们的目的是最小化 cost function,当 C 很大时,与 C 相乘的这一项只有非常接近于0时,才能让 cost function变小啊...当 C 非常大时,代价函数就等价于:min (1/2)·Σθ2j
②SVM的decision boundary
相比于逻辑回归,SVM能实现更复杂的非线性分类问题。先讨论下线性可分的情况下如何选择更好的 decision boundary?
对于样本数据而言,可能有很多种不同的 decision boundary 来对样本进行划分,比如:下图中就有三条 decision boundary,但我们觉得,黑色的那条decision boundary更好地将样本数据分开。

黑色的那条 decision boundary 的优点是:有着更大的 margin。这就是SVM分类器的特点:总是尽可能地找出一条最大 margin 的decision boundary,因此SVM有时也称为 Large Margin Classifier。
对于下图中的数据(有一个红色的叉很“奇特”),SVM又会怎样寻找 decision boundary呢?

当SVM的代价函数中的C不是太大的情况下,SVM还是会坚持黑色那条decision boundary,而不是转化成紫色的那条 decision boundary。
当SVM的代价函数中的参数C很大时,它就很可能会选择紫色的那条 decision boundary了。但是,在实际应用上,C 不会是 很大很大的,因此,尽管样本中出现了“奇异点”样本,SVM还是会坚持黑色那条decision boundary,从而具有一定的“容错性”
③SVM为什么是大间距分类器?(Why Large Margin?)
假设当C很大时,代价函数:min (1/2)·Σθ2j 可以表示成向量的乘法形式:min (1/2)θT·θ
因为:Σθj2 = (θ12 +θ22 +.... +θn2) = (θ1,θ2,....,θn)T• (θ1,θ2,....,θn) = ||θ||2
因此,我们把代价函数 转化成了:向量θ的范数,如下图 (n=2)

在最小化代价函数时,服从于下面条件:
θ
T
·x
(i)
>= 1 if y==1
θ
T
·x
(i)
<= -1 if y==0
向量乘法与向量投影之间的关系:假设有两个向量a,向量b;向量a、b之间的夹角为theta,由向量乘法公式:a*b=||a||*||b||*cos(theta)。其实,||b||*cos(theta)就是向量b在向量a上的投影。
根据向量的投影,θT·x(i) = p(i)•||θ||,其中p(i)是向量 x(i) 在 向量θ 方向上的投影。θT·x(i) = p(i)•||θ|| 的示意图如下:
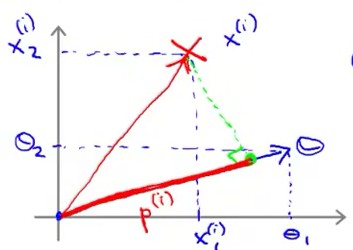
从而,将代价函数服从的条件转化成了“向量投影”表示,如下:
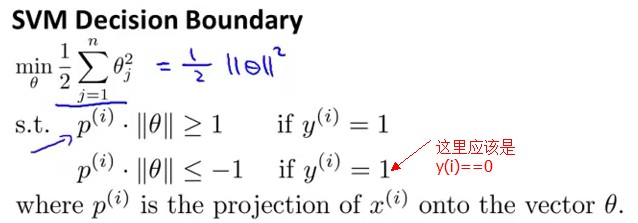
要想最小化代价函数(1/2)·Σθ2j ,就得让||θ||尽可能地小;但是又得满足条件:θT·x(i) >= 1 if y==1 and θT·x(i) <= -1 if y==0
根据:θT·x(i) = p(i)•||θ||。因此,要想θT·x(i) 尽可能地大于等于 1 ,就得让p(i) 尽可能地大,这样p(i)•||θ|| 才有更大的可能 大于等于1。
(不能让||θ||尽可能地大,因为||θ||大了,代价函数就大了,而我们的目标是最小化代价函数)
好,既然现在的目标是让p(i)尽可能地大,那p(i)代表的意义是什么呢?就是:margins(间距),这也是SVM被称为 大间距分类器 的原因。
那 p(i) 为什么代表的是间距呢?看下图:
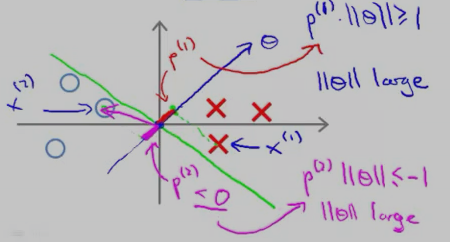
红色的叉叉 和 圆圈 表示的是训练的样本,我们用一条绿色的线(decision boundary)将叉叉 和 圆圈 分开。向量θ 的方向是与decision boundary 垂直的。
对于“红色的叉叉”这个样本x(1)而言,它的几何间距是 p(1);对于圆圈样本 x(2) 而言,它的几何间距是p(2)
从上图中可以看出,p(1) 和p(2) 的长度 都比较短,因此,要想让p(i)•||θ|| 大于等于1 或者 小于等于-1,只能让||θ||大一点了,而||θ||要是很大,代价函数就大了,而最小化SVM的代价函数的意义就是:找出一组参数(θ1,θ2......θn),使得代价函数尽可能地小。因此,SVM是不会选择 p(1) 长度 小的 decision boundary的。
再来看一个投影长度p(i) 比较长的例子:
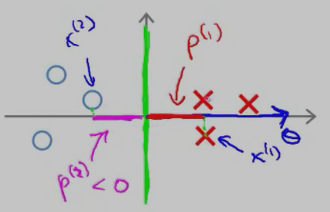
红色的叉叉 和 圆圈 表示的是训练的样本,我们用一条绿色的线(decision boundary)将叉叉 和 圆圈 分开,此时的decision boundary刚好是 y 轴(竖直线);红色的叉叉样本x(1) 在向量上的投影p(1 )刚好是x(1) 的 x 轴的坐标,它要比斜着的绿色decision boundary 上的投影 要长。
因此,SVM 会选择这条竖直的绿色 decision boundary 作为分类边界。它的 Margin 的示意图如下:
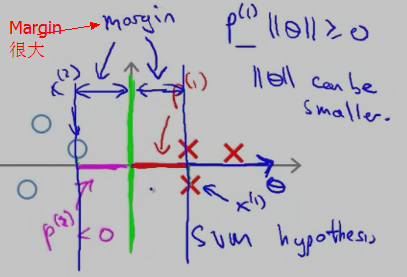
在上面的描述中,我们是先假设 SVM 的cost function 中的参数 C 很大,只留下了 θ(min (1/2)·Σθ2j )。然后根据 样本x(i) 在 θ向量上 的投影尽可能大 使得Margin很大,从而选择Margin大的 decision boundary,下面将从另一个角度来讨论为什么选择大的 margins(参考 cs229-notes3.pdf)
首先看下图中的一个线性可分的例子:
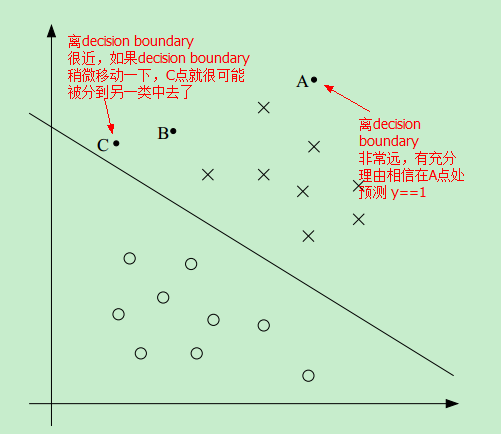
因此,如果我们能找到这样一条 decision boundary,让所有的点尽可能地离该decision boundary 远,这样我们就更有理由预测 y==1 或者 y==0
比如,相比于C点,我们更有理由相信 A点属于 positive 这一类,即更相信 预测 A点的 y==1 而不是预测C点的 y==1