muduo的Reactor模式主要有3个类实现-Channel、Poller、EventLoop
但是我自己认为核心还应该包括定时器,只有理解了定时器与其他三个类是如何搭配使用的才能算是真正理解了其核心架构吧.(也许是我在这里比较迷的缘故,哈哈哈)
首先,我们从简单的做起,一步一步构建思维脑图,理解Muduo核心结构
1. 事件分发类 Channel (最终干活的)
Channel是selectable IO channel,自始至终只负责一个 fd 的(注册与响应) IO 事件,但是不拥有该 fd ,所以也就在析构的时候不关闭它.
来来来,先喊三遍口号:
自始至终都属于一个EventLoop(一个EventLoop对应多个Channel,处理多个IO),自始至终只负责一个文件描述符的IO事件
自始至终都属于一个EventLoop(一个EventLoop对应多个Channel,处理多个IO),自始至终只负责一个文件描述符的IO事件
自始至终都属于一个EventLoop(一个EventLoop对应多个Channel,处理多个IO),自始至终只负责一个文件描述符的IO事件
如何工作:
在Channel类中保存这IO事件的类型以及对应的回调函数,当IO事件发生时,最终会调用到Channel类中的回调函数
具体流程如下:
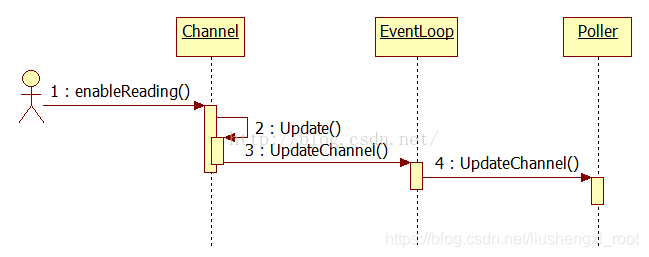
首先给定Channel所属的 loop,及其要处理的 fd;接着注册 fd 上需要监听的事件,如果是常用的读写事件的话,可以直接调用接口函数enableReading或enableWriting来注册对应fd上的事件,disable*是销毁指定的事件;然后通过 setCallback 来设置事件发生时的回调即可
注册事件时函数调用关系,如下:Channel::update()->EventLoop::updateChannel(Channel*)->Poller::updateChannel(Channel*),最终向 poll 系统调用的监听事件表注册或修改事件。
class EventLoop;
///
/// A selectable I/O channel.
///
/// This class doesn't own the file descriptor.
/// The file descriptor could be a socket,
/// an eventfd, a timerfd, or a signalfd
class Channel
{
public:
typedef std::function<void()> EventCallback;
Channel(EventLoop *loop, int fd)
: loop_(loop),
fd_(fdArg),
events_(0),
revents_(0),
index_(-1)
{
}
//处理事件,一般由Poller通过EventLoop来调用
//eventloop中有一个vector<Channel *>的 activeChannels_ 活动数组,自然可以调用它
//根据revents_ 的事件类型,执行相应的回调
void handleEvent()
{
if (revents_ & POLLNVAL)
{
LOG_WARN << "Channel::handle_event() POLLNVAL";
}
if (revents_ & (POLLERR | POLLNVAL))
{
if (errorCallback_)
errorCallback_();
}
if (revents_ & (POLLIN | POLLPRI | POLLRDHUP))
{
if (readCallback_)
readCallback_();
}
if (revents_ & POLLOUT)
{
if (writeCallback_)
writeCallback_();
}
}
void setReadCallback(const EventCallback &cb)
{
readCallback_ = cb;
}
void setWriteCallback(const EventCallback &cb)
{
writeCallback_ = cb;
}
void setErrorCallback(const EventCallback &cb)
{
errorCallback_ = cb;
}
int fd() const { return fd_; }
/* 返回 fd 注册的事件 */
int events() const { return events_; }
void set_revents(int revt) { revents_ = revt; }
bool isNoneEvent() const { return events_ == kNoneEvent; }
void enableReading()
{
events_ |= kReadEvent;
update();
}
// void enableWriting() { events_ |= kWriteEvent; update(); }
// void disableWriting() { events_ &= ~kWriteEvent; update(); }
// void disableAll() { events_ = kNoneEvent; update(); }
// for Epoller
int index() { return index_; }
void set_index(int idx) { index_ = idx; }
EventLoop *ownerLoop() { return loop_; }
private:
/* 通过调用loop_->updateChannel()来注册或改变本fd在epoll中监听的事件 */
void update()
{
loop_->updateChannel(this);
}
static const int kNoneEvent=0;
static const int kReadEvent=POLLIN | POLLPRI;
static const int kWriteEvent =POLLOUT;
EventLoop *loop_;
const int fd_;
int events_; //关注的事件
int revents_; //poll/epoll中返回的事件
int index_; // used by epoller. 表示在poll的事件数组中的序号
EventCallback readCallback_;
EventCallback writeCallback_;
EventCallback errorCallback_;
};
2. IO multiplexing 类 Poller
// 在我们这里将其直接写为一个具体类
Poller是个基类,具体可以是EPollPoller(默认) 或者PollPoller,对应 poll 和 epoll.需要去实现(唯一使用面向对象的一个类)
这里我们再来喊三遍口号:
是eventloop的成员,它的职责仅仅是IO复用,事件分发交给 Channel 完成,生命期和 EventLoop 一样长。
是eventloop的成员,它的职责仅仅是IO复用,事件分发交给 Channel 完成,生命期和 EventLoop 一样长。
是eventloop的成员,它的职责仅仅是IO复用,事件分发交给 Channel 完成,生命期和 EventLoop 一样长。
具体处理流程就是:
poll函数调用 epoll_wait/poll 来监听注册了的文件描述符,然后通过fillActiveChannels函数将返回的就绪事件装入 activeChannels 数组
Poller,h
namespace muduo
{
class Channel;
///
/// IO Multiplexing with poll(2).
///
/// This class doesn't own the Channel objects.
class Poller : boost::noncopyable
{
public:
typedef std::vector<Channel*> ChannelList;
Poller(EventLoop* loop); //需要传入EventLoop Objetct
~Poller();
/// Polls the I/O events.
/// Must be called in the loop thread.
// 核心功能,调用 epoll_wait/poll 来监听注册了的文件描述符
/* Channel::update()->EventLoop::updateChannel(Channel* channel)->Poller::updateChannel(Channel* channel)*/
Timestamp poll(int timeoutMs, ChannelList* activeChannels);
/// Changes the interested I/O events.
/// Must be called in the loop thread.
//负责维护和更新 pollfds_ 数组
void updateChannel(Channel* channel);
/* 断言 确保没有跨线程 */
void assertInLoopThread() { ownerLoop_->assertInLoopThread(); }
private:
//真正填充 activeChannels 的函数
void fillActiveChannels(int numEvents,
ChannelList* activeChannels) const;
typedef std::vector<struct pollfd> PollFdList;
typedef std::map<int, Channel*> ChannelMap;//key是文件描述符,value是Channel*
EventLoop* ownerLoop_;
PollFdList pollfds_;
ChannelMap channels_;
};
}
Poller,cc
Poller::Poller(EventLoop* loop)
: ownerLoop_(loop)
{
}
Poller::~Poller()
{
}
Timestamp Poller::poll(int timeoutMs, ChannelList* activeChannels)
{
// XXX pollfds_ shouldn't change
int numEvents = ::poll(&*pollfds_.begin(), pollfds_.size(), timeoutMs);
Timestamp now(Timestamp::now());
if (numEvents > 0) {
LOG_TRACE << numEvents << " events happended";
fillActiveChannels(numEvents, activeChannels);
} else if (numEvents == 0) {
LOG_TRACE << " nothing happended";
} else {
LOG_SYSERR << "Poller::poll()";
}
return now;
}
void Poller::fillActiveChannels(int numEvents,
ChannelList* activeChannels) const
{
for (PollFdList::const_iterator pfd = pollfds_.begin();
pfd != pollfds_.end() && numEvents > 0; ++pfd)
{
if (pfd->revents > 0)
{
--numEvents;
ChannelMap::const_iterator ch = channels_.find(pfd->fd);
assert(ch != channels_.end());
Channel* channel = ch->second;
assert(channel->fd() == pfd->fd);
channel->set_revents(pfd->revents);
// pfd->revents = 0;
activeChannels->push_back(channel);
}
}
}
void Poller::updateChannel(Channel* channel)
{
assertInLoopThread();
LOG_TRACE << "fd = " << channel->fd() << " events = " << channel->events();
if (channel->index() < 0) {
// muduo 使用了 index 去让channel 记住他在pollfds_的下标
// index < 0说明是一个新的通道
// a new one, add to pollfds_
assert(channels_.find(channel->fd()) == channels_.end());
struct pollfd pfd;
pfd.fd = channel->fd();
pfd.events = static_cast<short>(channel->events());
pfd.revents = 0;
pollfds_.push_back(pfd);
int idx = static_cast<int>(pollfds_.size())-1;
channel->set_index(idx);
channels_[pfd.fd] = channel;
} else {
// update existing one
assert(channels_.find(channel->fd()) != channels_.end());
assert(channels_[channel->fd()] == channel);
int idx = channel->index();
assert(0 <= idx && idx < static_cast<int>(pollfds_.size()));
struct pollfd& pfd = pollfds_[idx];
assert(pfd.fd == channel->fd() || pfd.fd == -1);
pfd.events = static_cast<short>(channel->events());
pfd.revents = 0;
// 将一个通道暂时更改为不关注事件,但不从Poller中移除该通道
if (channel->isNoneEvent()) {
// ignore this pollfd
pfd.fd = -1;
}
}
}
3. EventLoop 类
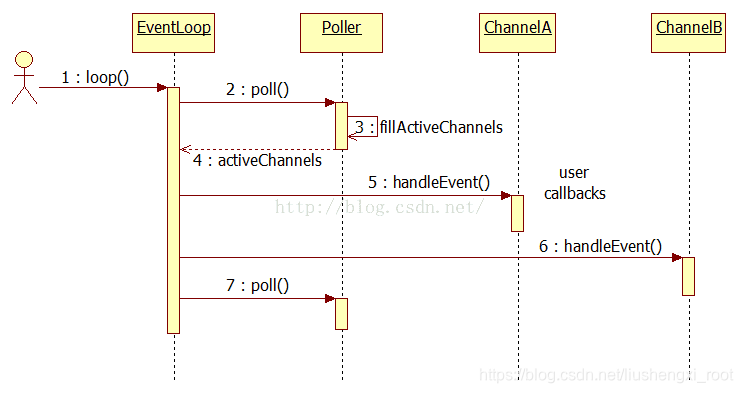
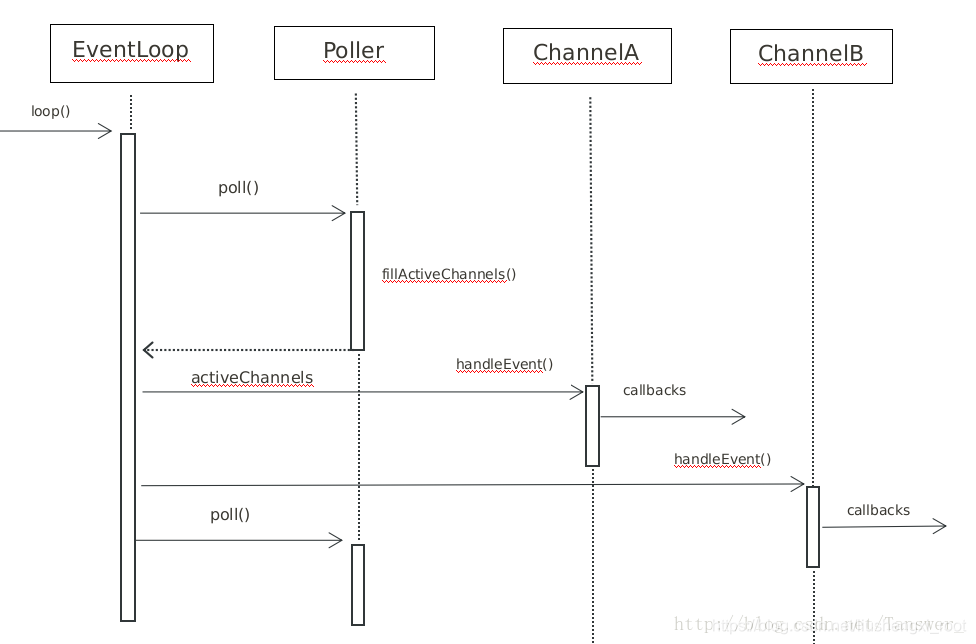
EventLoop类是Reactor模式的核心,一个线程一个事件循环,即one loop per thread,EventLoop 对象的生命周期通常与其所属的线程一样长。EventLoop对象构造的时候,会检查当前线程是否已经创建了其他EventLoop对象,如果已创建,终止程序(LOG_FATAL),EventLoop类的构造函数会记录本对象所属线程(threadld_),创建了EventLoop对象的线程称为IO线程.其主要功能是运行事件循环,等待事件发生,然后调用回调处理发生的事件。EventLoop::loop() -> Poller::poll()填充就绪事件集合 activeChannels,然后遍历该容器,执行每个 channel的 Channel::handleEvent() 完成对应就绪事件回调。
EventLoop.h
class Channel;
class Poller;
class EventLoop : boost::noncopyable
{
public:
EventLoop();
// force out-line dtor, for scoped_ptr members.
~EventLoop();
///
/// Loops forever.
/// 核心
/// Must be called in the same thread as creation of the object.
///**`EventLoop::loop() -> Poller::poll() `填充就绪事件集合 `activeChannels`,
//然后遍历该容器,执行每个 `channel `的 `Channel::handleEvent()`
// 完成对应就绪事件回调。**
void loop();
void quit();
// internal use only
void updateChannel(Channel* channel);
// void removeChannel(Channel* channel);
void assertInLoopThread()
{
if (!isInLoopThread())
{
abortNotInLoopThread();
}
}
bool isInLoopThread() const { return threadId_ == CurrentThread::tid(); }
private:
void abortNotInLoopThread();
typedef std::vector<Channel*> ChannelList;
bool looping_; /* atomic */
bool quit_; /* atomic */
const pid_t threadId_; //线程ID
boost::scoped_ptr<Poller> poller_;
ChannelList activeChannels_;
};
}
using namespace muduo;
__thread EventLoop* t_loopInThisThread = 0;
const int kPollTimeMs = 10000;
EventLoop::EventLoop()
: looping_(false),
quit_(false),
threadId_(CurrentThread::tid()),
poller_(new Poller(this))
{
LOG_TRACE << "EventLoop created " << this << " in thread " << threadId_;
if (t_loopInThisThread)
{
LOG_FATAL << "Another EventLoop " << t_loopInThisThread
<< " exists in this thread " << threadId_;
}
else
{
t_loopInThisThread = this;
}
}
EventLoop::~EventLoop()
{
assert(!looping_);
t_loopInThisThread = NULL;
}
void EventLoop::loop()
{
assert(!looping_);
assertInLoopThread();
looping_ = true;
quit_ = false;
while (!quit_)
{
activeChannels_.clear();
poller_->poll(kPollTimeMs, &activeChannels_);
for (ChannelList::iterator it = activeChannels_.begin();
it != activeChannels_.end(); ++it)
{
(*it)->handleEvent();
}
}
LOG_TRACE << "EventLoop " << this << " stop looping";
looping_ = false;
}
void EventLoop::quit()
{
quit_ = true;
// wakeup();
}
void EventLoop::updateChannel(Channel* channel)
{
assert(channel->ownerLoop() == this);
assertInLoopThread();
poller_->updateChannel(channel);
}
void EventLoop::abortNotInLoopThread()
{
LOG_FATAL << "EventLoop::abortNotInLoopThread - EventLoop " << this
<< " was created in threadId_ = " << threadId_
<< ", current thread id = " << CurrentThread::tid();
}
使用以上三个类.来看一个简单的例子:
#include "Channel.h"
#include "EventLoop.h"
#include <stdio.h>
#include <sys/timerfd.h>
muduo::EventLoop *g_loop;
void timeout()
{
printf("Timeout!
");
g_loop->quit();
}
int main()
{
muduo::EventLoop loop;
g_loop = &loop;
int timerfd = ::timerfd_create(CLOCK_MONOTONIC, TFD_NONBLOCK | TFD_CLOEXEC);//创建一个新的定时器对象
muduo::Channel channel(&loop, timerfd);
channel.setReadCallback(timeout);
channel.enableReading();
struct itimerspec howlong;
bzero(&howlong, sizeof howlong);
howlong.it_value.tv_sec = 5;
::timerfd_settime(timerfd, 0, &howlong, NULL);
loop.loop();
::close(timerfd);
}
程序利用timerfd实现一个单词触发的定时器.channel将该timerfd上的可读事件转发给了timerout函数
4. TimerQueue 定时器
以下摘自陈硕的博客:
Linux 时间函数
Linux 的计时函数,用于获得当前时间:
- time(2) / time_t (秒)
- ftime(3) / struct timeb (毫秒)
- gettimeofday(2) / struct timeval (微秒)
- clock_gettime(2) / struct timespec (纳秒)
- gmtime / localtime / timegm / mktime / strftime / struct tm (这些与当前时间无关)
定时函数,用于让程序等待一段时间或安排计划任务:
sleep
alarm
usleep
nanosleep
clock_nanosleep
getitimer / setitimer
timer_create / timer_settime / timer_gettime / timer_delete
timerfd_create / timerfd_gettime / timerfd_settime
我的取舍如下:
- (计时)只使用 gettimeofday 来获取当前时间。(这里我在协程里面我是使用clock_gettime(2) )
- (定时)只使用 timerfd_* 系列函数来处理定时。
gettimeofday 入选原因:(这也是 muduo::Timestamp class 的主要设计考虑)
- time 的精度太低,ftime 已被废弃,clock_gettime 精度最高,但是它系统调用的开销比 gettimeofday 大。(PS:这是陈硕2011年写的文章,现在时间获取函数在主流系统上基本都不是系统调用了)
- /在 x86-64 平台上,gettimeofday 不是系统调用,而是在用户态实现的(搜 vsyscall),没有上下文切换和陷入内核的开销。/
- gettimeofday 的分辨率 (resolution) 是 1 微秒,足以满足日常计时的需要。muduo::Timestamp 用一个 int64_t 来表示从 Epoch 到现在的微秒数,其范围可达上下 30 万年。
PS:C++的time_t是 int32_t 表示秒数,时间不准.
timerfd_* 入选的原因:
-
sleep / alarm / usleep 在实现时有可能用了信号 SIGALRM,在多线程程序中处理信号是个相当麻烦的事情,应当尽量避免。(近期我会写一篇博客仔细讲讲“多线程、RAII、fork() 与信号”)
-
nanosleep 和 clock_nanosleep 是线程安全的,但是在非阻塞网络编程中,绝对不能用让线程挂起的方式来等待一段时间,程序会失去响应。正确的做法是注册一个时间回调函数。
-
getitimer 和 timer_create 也是用信号来 deliver 超时,在多线程程序中也会有麻烦。timer_create 可以指定信号的接收方是进程还是线程,算是一个进步,不过在信号处理函数(signal handler)能做的事情实在很受限。
-
timerfd_create把时间变成了一个文件描述符,该“文件”在定时器超时的那一刻变得可读,这样就能很方便地融入到select/poll框架中,用统一的方式来处理 IO 事件和超时事件,这也正是Reactor模式的长处。
传统的 Reactor 利用 select/poll/epoll 的 timeout 来实现定时功能,但 poll 和 epoll 的定时精度只有毫秒,远低于 timerfd_settime 的定时精度。
这里有三个类,还比较麻烦,不过不急,我们慢慢来看:
(1)TimerId 类
唯一标识一个 Timer 定时器。TimerId Class 同时保存Timer* 和 sequence_,这个 sequence_ 是每个 Timer 对象有一个全局递增的序列号 int64_t sequence_,用原子计数器(AtomicInt64)生成
它主要用于注销定时器,int64_t sequence_ 可以区分地址相同的先后两个 Timer 对象。下面代码先忽略int64_t sequence_,也就是先不实现cancel 的接口,我们在这里只理解其工作方式即可
TimreId 类
namespace muduo
{
class Timer;
///
/// An opaque identifier, for canceling Timer.
///
class TimerId : public muduo::copyable
{
public:
explicit TimerId(Timer *timer)
: value_(timer)
{
}
// default copy-ctor, dtor and assignment are okay
private:
Timer *value_;
};
Timer 定时器类(真正的超时事件,封装了真正的超时回调)
封装了定时器的一些参数,包括超时时间(expiration_)、超时回调函数(callback_)、时间间隔(interval_)、是否重复定时(repeat_)、定时器的序列号等成员变量,成员函数大都是返回这些变量的值,run() 用来调用回调函数,restart() 用来重启定时器。
Timer.h
namespace muduo
{
///
/// Internal class for timer event.
///
class Timer : boost::noncopyable
{
public:
Timer(const TimerCallback& cb, Timestamp when, double interval)
: callback_(cb),
expiration_(when),
interval_(interval),
repeat_(interval > 0.0)
{ }
void run() const
{
callback_();//执行定时器回调函数
}
Timestamp expiration() const { return expiration_; }
/* 是否周期性定时 */
bool repeat() const { return repeat_; }
/* 重启定时器 */
void restart(Timestamp now)
{
if (repeat_)
{
//如果需要重复,那就将时间设为下次超时的时间
expiration_ = addTime(now, interval_);
}
else
{
//如果不需要重复,那就将超时时间设为一个不可用的 value
expiration_ = Timestamp::invalid();
}
}
private:
const TimerCallback callback_; //回调函数
Timestamp expiration_; //时间戳
const double interval_;//时间间隔,如果是一次性定时器,该值为0
const bool repeat_;//是否重复执行
};
}
TimerQueue 定时器容器类
这里muduo使用的是下面的结构去管理的定时器的
typedef std::pair<Timestamp, Timer*> Entry;
typedef std::set<Entry> TimerList;
他说是multimap应为不常用被抛弃了,唉,对于这点,也是醉了
TimerQueue 定时器容器类中需要处理两个 Timer 的超时时间相同的问题,所以可以用multimap
通过给 timerfd 一个超时时间实现超时计时,它内部有 Channel,通过 Channel 管理 timerfd,然后向EventLoop和Poller 注册 timerfd 的可读事件,当 timerfd 的可读事件就绪时表明一个超时时间点到了,然后Channle对象timerfdChannel_调用可读事件回调 handleRead(),通过 getExpired() 找出所有的超时事件,然后执行相应的超时回调函数 Timer::run()。为了复用定时器,每次处理完之后,会检查这些超时定时器是否需要重复定时,如果需要重复,就再次添加到定时器集合中。
timerfd 如何实现多个定时器超时计时的呢?就是在插入的时候与set 元素比较,然后更新timerfd,从而保证 timerfd 始终是 set 中最近的一个超时时间.当 timerfd 可读时,还是需要遍历容器,因为有可能此时有多个 Timer 超时了(尽管 tiemrfd 是当前最小的超时时间).唉,何必这么麻烦呐,直接用时间堆管理不好吗?timerfd == 堆顶,不过,我学到的是还是需要遍历容器(堆)的
TimerQueue.h
namespace muduo
{
class EventLoop;
class Timer;
class TimerId;
///
/// A best efforts timer queue.
/// No guarantee that the callback will be on time.
///
class TimerQueue : boost::noncopyable
{
public:
TimerQueue(EventLoop* loop);
~TimerQueue();
///
/// Schedules the callback to be run at given time,
/// repeats if @c interval > 0.0.
///
/// Must be thread safe. Usually be called from other threads.
TimerId addTimer(const TimerCallback& cb,
Timestamp when,
double interval);
// void cancel(TimerId timerId);
private:
// FIXME: use unique_ptr<Timer> instead of raw pointers.
typedef std::pair<Timestamp, Timer*> Entry;
typedef std::set<Entry> TimerList;
void addTimerInLoop(Timer* timer);
// called when timerfd alarms
void handleRead();
// move out all expired timers
std::vector<Entry> getExpired(Timestamp now);
void reset(const std::vector<Entry>& expired, Timestamp now);
bool insert(Timer* timer);
EventLoop* loop_;
const int timerfd_;
Channel timerfdChannel_;
// Timer list sorted by expiration
TimerList timers_;
};
}
#endif // MUDUO_NET_TIMERQUEUE_H
加入定时器之后的EventLoop类
EventLoop加入三个函数:runAt()、runAfter()、runEvery()。统统转而调用TimerQueue::addTimer
muduo中有一个EventLoop::runInLoop函数,用来在其他线程中唤醒IO线程(就是创建并运行了EventLoop的线程),但是在协程里面应该是用不到,所以暂时不接触这一点
EventLoop.h
#include "datetime/Timestamp.h"
#include "thread/Thread.h"
#include "Callbacks.h"
#include "TimerId.h"
#include <boost/scoped_ptr.hpp>
#include <vector>
namespace muduo
{
class Channel;
class Poller;
class TimerQueue;
class EventLoop : boost::noncopyable
{
public:
EventLoop();
// force out-line dtor, for scoped_ptr members.
~EventLoop();
///
/// Loops forever.
///
/// Must be called in the same thread as creation of the object.
///
void loop();
void quit();
///
/// Time when poll returns, usually means data arrivial.
///
Timestamp pollReturnTime() const { return pollReturnTime_; }
// timers
///
/// Runs callback at 'time'.
///
TimerId runAt(const Timestamp& time, const TimerCallback& cb);
///
/// Runs callback after @c delay seconds.
///
TimerId runAfter(double delay, const TimerCallback& cb);
///
/// Runs callback every @c interval seconds.
///
TimerId runEvery(double interval, const TimerCallback& cb);
// void cancel(TimerId timerId);
// internal use only
void updateChannel(Channel* channel);
// void removeChannel(Channel* channel);
void assertInLoopThread()
{
if (!isInLoopThread())
{
abortNotInLoopThread();
}
}
bool isInLoopThread() const { return threadId_ == CurrentThread::tid(); }
private:
void abortNotInLoopThread();
typedef std::vector<Channel*> ChannelList;
bool looping_; /* atomic */
bool quit_; /* atomic */
const pid_t threadId_;
Timestamp pollReturnTime_;
boost::scoped_ptr<Poller> poller_;
boost::scoped_ptr<TimerQueue> timerQueue_;
ChannelList activeChannels_;
};
}
#endif // MUDUO_NET_EVENTLOOP_H
using namespace muduo;
__thread EventLoop* t_loopInThisThread = 0;
const int kPollTimeMs = 10000;
EventLoop::EventLoop()
: looping_(false),
quit_(false),
threadId_(CurrentThread::tid()),
poller_(new Poller(this)),
timerQueue_(new TimerQueue(this))
{
LOG_TRACE << "EventLoop created " << this << " in thread " << threadId_;
if (t_loopInThisThread)
{
LOG_FATAL << "Another EventLoop " << t_loopInThisThread
<< " exists in this thread " << threadId_;
}
else
{
t_loopInThisThread = this;
}
}
EventLoop::~EventLoop()
{
assert(!looping_);
t_loopInThisThread = NULL;
}
void EventLoop::loop()
{
assert(!looping_);
assertInLoopThread();
looping_ = true;
quit_ = false;
while (!quit_)
{
activeChannels_.clear();
pollReturnTime_ = poller_->poll(kPollTimeMs, &activeChannels_);
for (ChannelList::iterator it = activeChannels_.begin();
it != activeChannels_.end(); ++it)
{
(*it)->handleEvent();
}
}
LOG_TRACE << "EventLoop " << this << " stop looping";
looping_ = false;
}
void EventLoop::quit()
{
quit_ = true;
// wakeup();
}
TimerId EventLoop::runAt(const Timestamp& time, const TimerCallback& cb)
{
return timerQueue_->addTimer(cb, time, 0.0);
}
TimerId EventLoop::runAfter(double delay, const TimerCallback& cb)
{
Timestamp time(addTime(Timestamp::now(), delay));
return runAt(time, cb);
}
TimerId EventLoop::runEvery(double interval, const TimerCallback& cb)
{
Timestamp time(addTime(Timestamp::now(), interval));
return timerQueue_->addTimer(cb, time, interval);
}
void EventLoop::updateChannel(Channel* channel)
{
assert(channel->ownerLoop() == this);
assertInLoopThread();
poller_->updateChannel(channel);
}
void EventLoop::abortNotInLoopThread()
{
LOG_FATAL << "EventLoop::abortNotInLoopThread - EventLoop " << this
<< " was created in threadId_ = " << threadId_
<< ", current thread id = " << CurrentThread::tid();
}