上周还在测试板间通讯的延时,这周已经解决延时问题,服务端代码优化后更稳定了,新增了控制端界面重启服务器上服务端功能,如图:
新增了服务器端提交日志到backups(另一个专门处理日志的项目)项目下,如图:

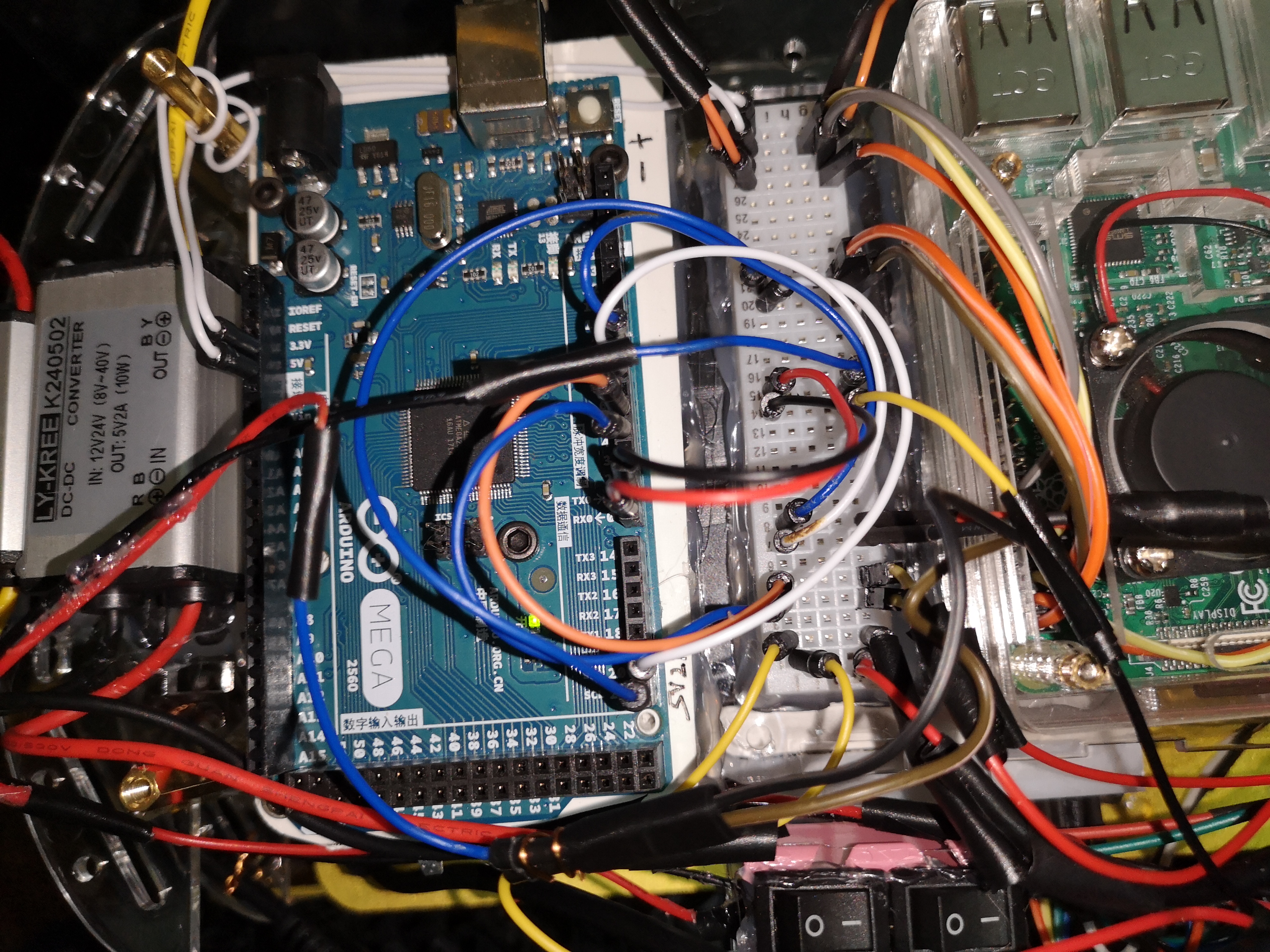
机器人新增了一些功能,启动后已经能够和远在国外的服务器保持良好的通讯,如图:

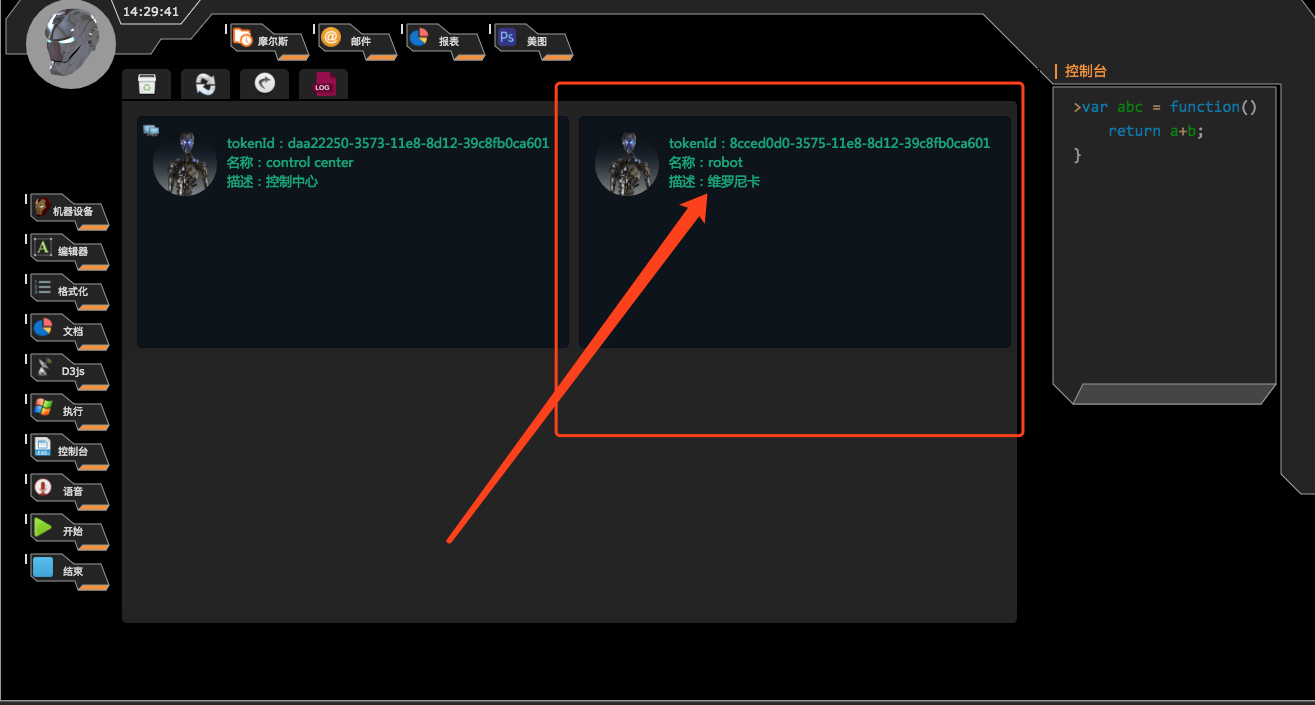
服务器将最新的设备信息返回给家里的电脑控制端,如图:
正在逐步实现自动化。

(雷达数据都是由超声波传感器收集的实时数据,图上距离和实际距离精度准确,并将会改进成自动跟踪)
上周还在测试板间通讯的延时,这周已经解决延时问题,服务端代码优化后更稳定了,新增了控制端界面重启服务器上服务端功能,如图:
新增了服务器端提交日志到backups(另一个专门处理日志的项目)项目下,如图:
机器人新增了一些功能,启动后已经能够和远在国外的服务器保持良好的通讯,如图:
服务器将最新的设备信息返回给家里的电脑控制端,如图:
正在逐步实现自动化。
(雷达数据都是由超声波传感器收集的实时数据,图上距离和实际距离精度准确,并将会改进成自动跟踪)