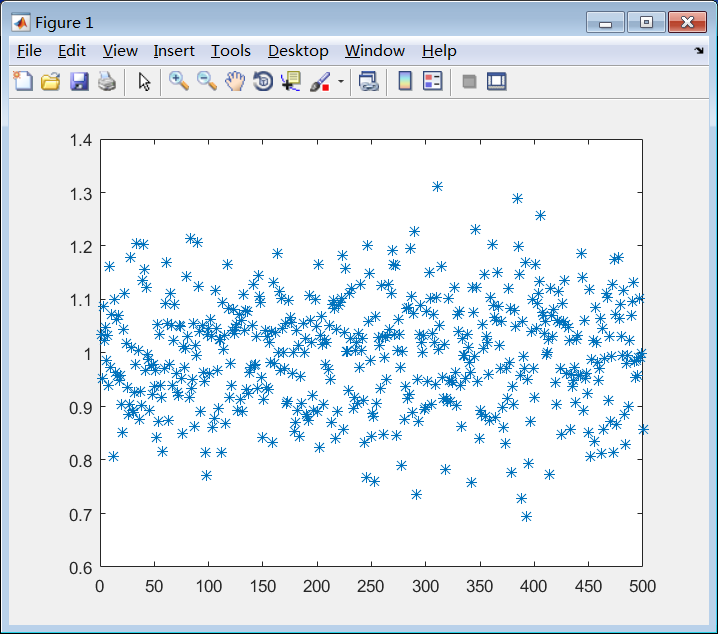
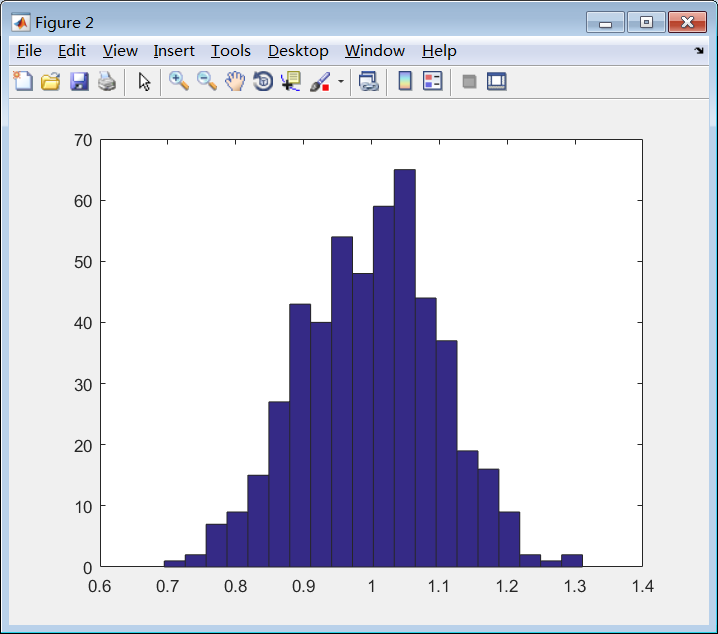
一、matlab的高斯分布随机数组
s=1:1:500;
in = 0.1*randn(1,500)+1;
plot(s,in,'*');
hist(in,20);
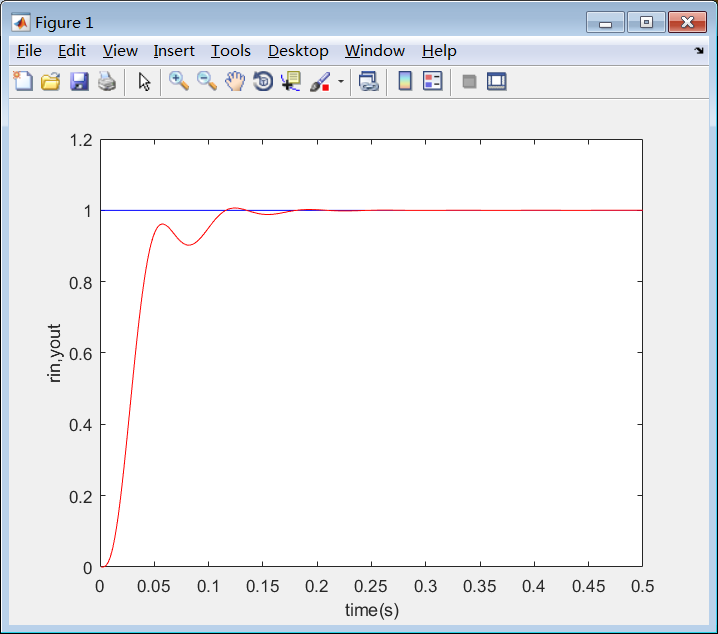
二、PID控制
网上源码:
clear all;
close all;
ts=0.001;
sys=tf(5.235e005,[1,87.35,1.047e004,0]);%建立传递函数
dsys=c2d(sys,ts,'z');%将连续的时间模型转换成离散的时间模型,采样时间是ts=0.001
[num,den]=tfdata(dsys,'v');%获得离散后的分子分母
u_1=0.0;u_2=0.0;u_3=0.0;
y_1=0.0;y_2=0.0;y_3=0.0;
x=[0,0,0]';
error_1=0;
for k=1:1:500
time(k)=k*ts;
rin(k) = 1 ; %输入为(0.8,1.2)上高斯分布的的随机数
kp=0.6;ki=0.001;kd=0.001; %设置的P,I,D参数
u(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controller
%Linear model 线性模型
yout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*u_1+num(3)*u_2+num(4)*u_3;
error(k)=rin(k)-yout(k);
%Return of parameters
u_3=u_2;u_2=u_1;u_1=u(k);
y_3=y_2;y_2=y_1;y_1=yout(k);
x(1)=error(k); %Calculating P
x(2)=(error(k)-error_1)/ts; %Calculating
x(3)=x(3)+error(k)*ts; %Calculating I
xi(k)=x(3);
error_1=error(k);
end
figure(1);
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)');ylabel('rin,yout')
三、高斯分布的输入
%PID Controler
clear all;
close all;
s=1:1:500;
in = 0.1*randn(1,500)+1; %取500个(0.95,1.05)上高斯分布的的随机数
% plot(s,in,'*');grid on
ts=0.001;
sys=tf(5.235e005,[1,87.35,1.047e004,0]);%建立传递函数
dsys=c2d(sys,ts,'z');%将连续的时间模型转换成离散的时间模型,采样时间是ts=0.001
[num,den]=tfdata(dsys,'v');%获得离散后的分子分母
u_1=0.0;u_2=0.0;u_3=0.0;
y_1=0.0;y_2=0.0;y_3=0.0;
x=[0,0,0]';
error_1=0;
for k=1:1:500
time(k)=k*ts;
rin(k) = in(k) ; %输入为(0.95,1.05)上高斯分布的的随机数
kp=0.6;ki=0.001;kd=0.001; %设置的P,I,D参数
u(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controller
%Linear model 线性模型
yout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*u_1+num(3)*u_2+num(4)*u_3;
error(k)=rin(k)-yout(k);
%Return of parameters
u_3=u_2;u_2=u_1;u_1=u(k);
y_3=y_2;y_2=y_1;y_1=yout(k);
x(1)=error(k); %Calculating P
x(2)=(error(k)-error_1)/ts; %Calculating
x(3)=x(3)+error(k)*ts; %Calculating I
xi(k)=x(3);
error_1=error(k);
end
figure(1);
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)');ylabel('rin,yout');
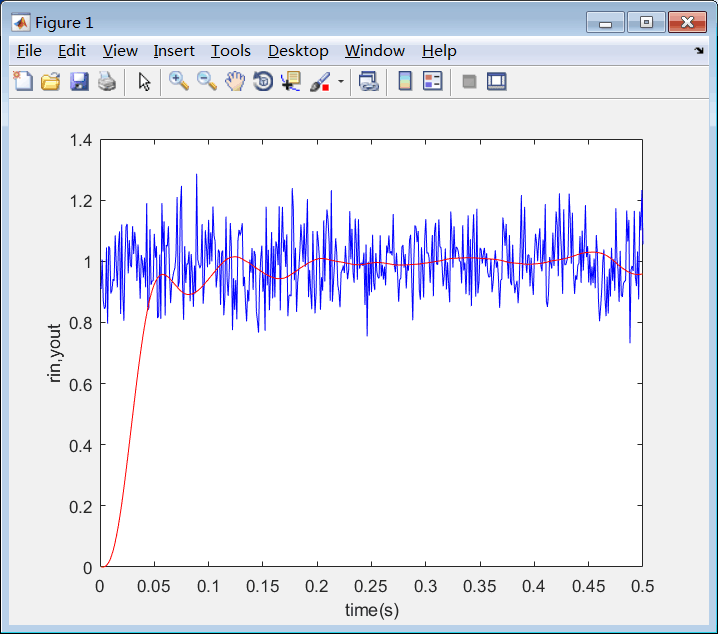
效果不错,还挺开心。下次做个基于退火的自整定控制系统