1 SPI物理层
SPI通信设备之间常用物理连接方式如下图

SPI通讯使用3条总线及片选线,3条总线分别为SCK、MOSI、MISO,片选线为CS。
CS:从设备选择信号线,常称为片选信号线,也称为NSS。当有多个SPI从设备与SPI主机相连时,设备的其它信号线SCK、MOSI及MISO同时并联到相同的SPI总线上,即无论有多少个从设备,都共同只使用这3条总线;而每个从设备都有独立的这一条CS信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。SPI协议中没有设备地址,它使用CS信号线来寻址,当主机要选择从设备时,把该从设备的CS信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行SPI通讯。所以SPI通讯以CS线置低电平为开始信号,以NSS线被拉高作为结束信号。
SCK:时钟信号线,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如STM32的SPI时钟频率最大为fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
在NRF52832中
typedef enum
{
NRF_DRV_SPI_FREQ_125K = NRF_SPI_FREQ_125K, ///< 125 kbps.
NRF_DRV_SPI_FREQ_250K = NRF_SPI_FREQ_250K, ///< 250 kbps.
NRF_DRV_SPI_FREQ_500K = NRF_SPI_FREQ_500K, ///< 500 kbps.
NRF_DRV_SPI_FREQ_1M = NRF_SPI_FREQ_1M, ///< 1 Mbps.
NRF_DRV_SPI_FREQ_2M = NRF_SPI_FREQ_2M, ///< 2 Mbps.
NRF_DRV_SPI_FREQ_4M = NRF_SPI_FREQ_4M, ///< 4 Mbps.
NRF_DRV_SPI_FREQ_8M = NRF_SPI_FREQ_8M ///< 8 Mbps.
} nrf_drv_spi_frequency_t;
nrf_drv_spi_frequency_t可以用来配置SPI的通信速率。
MOSI (Master Output, Slave Input)主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,即这条线上数据的方向为主机到从机。
MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读入数据,从机的数据由这条信号线输出到主机,即在这条线上数据的方向为从机到主机。
2 协议层
2.1 SPI基本通信过程

这是一个主机的通讯时序。NSS、SCK、MOSI信号都由主机控制产生,而MISO的信号由从机产生,主机通过该信号线读取从机的数据。MOSI与MISO的信号只在NSS为低电平的时候才有效,在SCK的每个时钟周期MOSI和MISO传输一位数据。
在上图中的标号1处,NSS信号线由高变低,是SPI通讯的起始信号。NSS是每个从机各自独占的信号线,当从机检在自己的NSS线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。在图中的标号处,NSS信号由低变高,是SPI通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
SPI使用MOSI及MISO信号线来传输数据,使用SCK信号线进行数据同步。MOSI及MISO数据线在SCK的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时,MSB先行或LSB先行并没有作硬性规定,但要保证两个SPI通讯设备之间使用同样的协定,一般都会采用上图中的MSB先行模式。
观察图中的2,3,4,5标号处,MOSI及MISO的数据在SCK的上升沿期间变化输出,在SCK的下降沿时被采样。即在SCK的下降沿时刻,MOSI及MISO的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI及MISO为下一次表示数据做准备。
SPI每次数据传输可以8位或16位为单位,每次传输的单位数不受限制。
3 SPI的模式
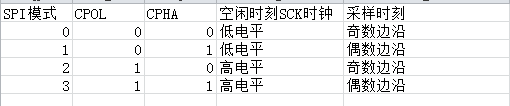
上面讲述的图中的时序只是SPI中的其中一种通讯模式,SPI一共有四种通讯模式,它们的主要区别是总线空闲时SCK的时钟状态以及数据采样时刻。为方便说明,在此引入“时钟极性CPOL”和“时钟相位CPHA”的概念。
时钟极性CPOL是指SPI通讯设备处于空闲状态时,SCK信号线的电平信号(即SPI通讯开始前、 NSS线为高电平时SCK的状态)。CPOL=0时, SCK在空闲状态时为低电平,CPOL=1时,则相反。
时钟相位CPHA是指数据的采样的时刻,当CPHA=0时,MOSI或MISO数据线上的信号将会在SCK时钟线的“奇数边沿”被采样。当CPHA=1时,数据线在SCK的“偶数边沿”采样。

我们来分析这个CPHA=0的时序图。首先,根据SCK在空闲状态时的电平,分为两种情况。SCK信号线在空闲状态为低电平时,CPOL=0;空闲状态为高电平时,CPOL=1。
无论CPOL=0还是=1,因为我们配置的时钟相位CPHA=0,在图中可以看到,采样时刻都是在SCK的奇数边沿。注意当CPOL=0的时候,时钟的奇数边沿是上升沿,而CPOL=1的时候,时钟的奇数边沿是下降沿。所以SPI的采样时刻不是由上升/下降沿决定的。MOSI和MISO数据线的有效信号在SCK的奇数边沿保持不变,数据信号将在SCK奇数边沿时被采样,在非采样时刻,MOSI和MISO的有效信号才发生切换。

类似地,当CPHA=1时,不受CPOL的影响,数据信号在SCK的偶数边沿被采样,见上图。
由CPOL及CPHA的不同状态,SPI分成了四种模式,见下表,主机与从机需要工作在相同的模式下才可以正常通讯,实际中采用较多的是“模式0”与“模式3”。
3 软件模拟
模式0
void SPI_write_read_mode1(unsigned int n_Data)
{
unsigned char x = 0x00;
unsigned int data;
SPI_CS = 0;
delay_us(10);
for(x = 0x00;x < 8;x ++)
{
SPI_SCK = 0; //数据发送
if((n_Data & 0x80) == 0x80)
SPI_MOSI = 1;
else SPI_MOSI = 0;
n_Data = n_Data << 1;
SPI_SCK = 1; //数据接收
data<<=1;
if(SPI_MISO)
{data++;}
SPI_SCK = 0;
}
}
模式1
void SPI_write_read_mode2(unsigned int n_Data)
{
unsigned char x = 0x00;
unsigned int data;
SPI_CS = 0;
delay_us(10);
for(x = 0x00;x < 8;x ++)
{
SPI_SCK = 1; //数据发送
if((n_Data & 0x80) == 0x80)
SPI_MOSI = 1;
else SPI_MOSI = 0;
n_Data = n_Data << 1;
SPI_SCK = 0; //数据接收
data<<=1;
if(SPI_MISO)
{data++;}
SPI_SCK = 0;
}
}
模式2
void SPI_write_read_mode3(unsigned int n_Data)
{
unsigned char x = 0x00;
unsigned int data;
SPI_CS = 0;
delay_us(10);
for(x = 0x00;x < 8;x ++)
{
SPI_SCK = 1; //数据发送
if((n_Data & 0x80) == 0x80)
SPI_MOSI = 1;
else SPI_MOSI = 0;
n_Data = n_Data << 1;
SPI_SCK = 0; //数据接收
data<<=1;
if(SPI_MISO)
{data++;}
SPI_SCK = 0;
}
SPI_SCK = 1;
}
模式3
void SPI_write_read_mode4(unsigned int n_Data)
{
unsigned char x = 0x00;
unsigned int data;
SPI_CS = 0;
delay_us(10);
for(x = 0x00;x < 8;x ++)
{
SPI_SCK = 0; //数据发送
if((n_Data & 0x80) == 0x80)
SPI_MOSI = 1;
else SPI_MOSI = 0;
n_Data = n_Data << 1;
SPI_SCK = 1; //数据接收
data<<=1;
if(SPI_MISO)
{data++;}
SPI_SCK = 0;
}
SPI_SCK = 1;
}
参考资料:
1《STM32库开发实战指南-基于STM32F4》 刘火良,杨森编著 机械工业出版社
2 软件模拟SPI部分的程序参考了公众号“ Bernice坚果丁” https://mp.weixin.qq.com/s/SqKvReXRXCrqIj-G78I9CA