前俩次,都用到了(rounding()),遗憾的是,都没有讲清楚,这次稍微具体地讲下这篇论文。但是说实话,我感觉,我还是没有领会到这篇文章的精髓。
Setup of Batch PCA and Online PCA
Batch PCA的目标,就是寻找一个子空间,能够最小化平方误差。
这篇论文,给出了一个比较新颖的表达方式:

where,
(min mathbb{R}^{n})
(rank(P) =k)
一般来讲,最优解就是,(m = overline{x}), 而(P)所对应的子空间就是协方差矩阵的前(k)个特征向量组成的子空间。
论文对(1)进行了一个改写:
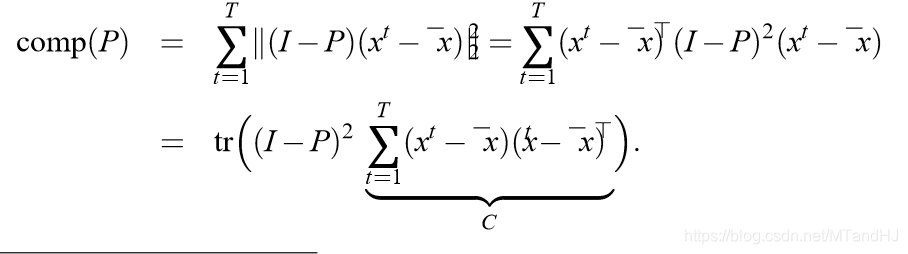

上面式子的一种直观解释就是,(comp(P))就是一种损失,这个损失是由投影矩阵(P)带来的。
而在streaming PCA(论文里为Online PCA):

很自然的,

成了(T)次迭代所积累的损失。
我们希望,这些损失,能够接近由Batch PCA所产生的损失。
Hedge Algorithm
假设,有(n)个专家:expert (i), (i=1,2,ldots,n).
有一个概率向量(mathsf{w}),每个元素(mathsf{w}_i)为舍弃expert (i)的概率。
自然而然,会有一个损失,称之为:(mathcal{l}),每个元素是舍弃相应expert的损失,但是要求(mathcal{l}in[0,1]),所以我估计得有个单位化的过程。
下面就是如何选取专家,和迭代更新(mathsf{w})的算法。
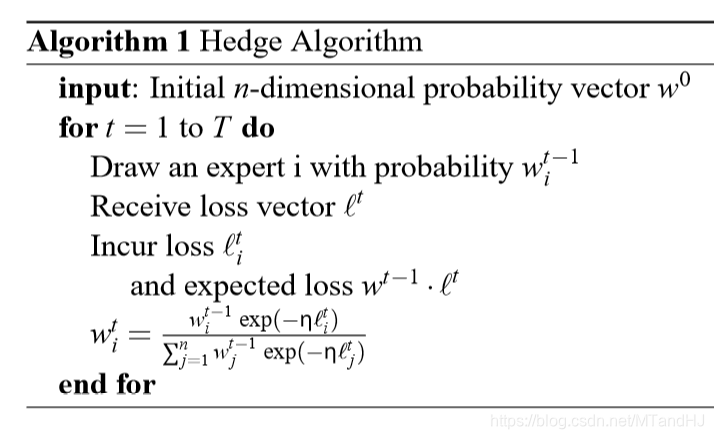
这个(mathbf{w})的更新,有点类似adaboost,感觉其它地方也有看到过,至于其中的原理,估计还是得看论文吧。
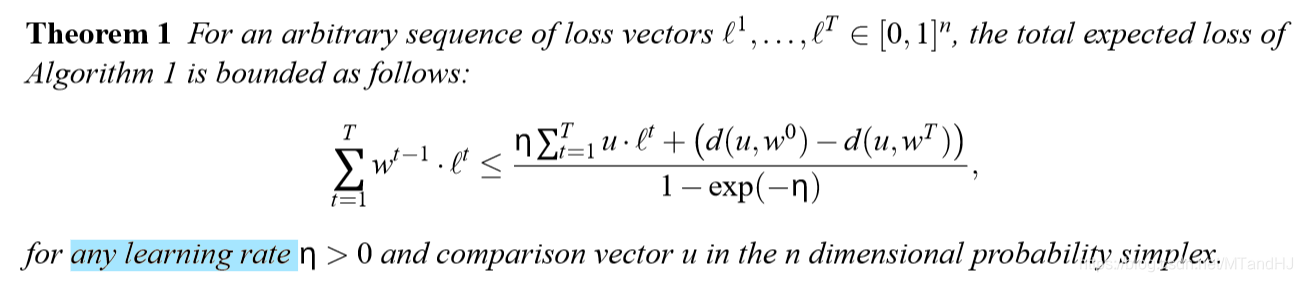
同时,有下面的性质:

改进算法
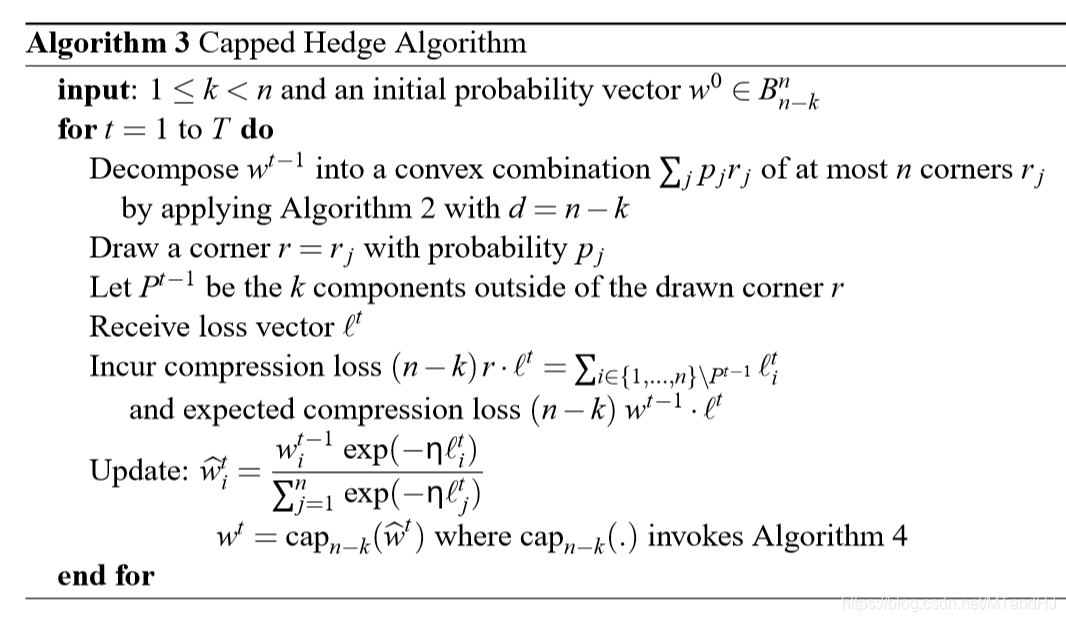
这个算法的目标是,将(mathbf{w})分解为(mathop{sum}limits_{i}p_ir_i),其中(p_i)为概率,(r_i)为((n-k))-corner.(d)-corner,是指有且仅有(d)个非零项,且非零项的值为:(frac{1}{d}).分解完毕只有,不同于上面的算法,这个算法将通过分布(p_i)选择(r_i),而(r_i)中的非零项所对应的指标就是相应的要舍弃的专家,expert。
分解算法如下:
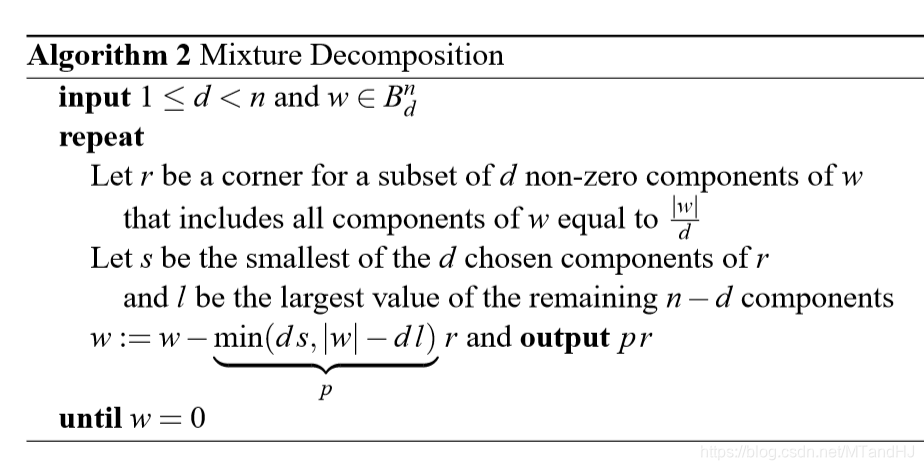
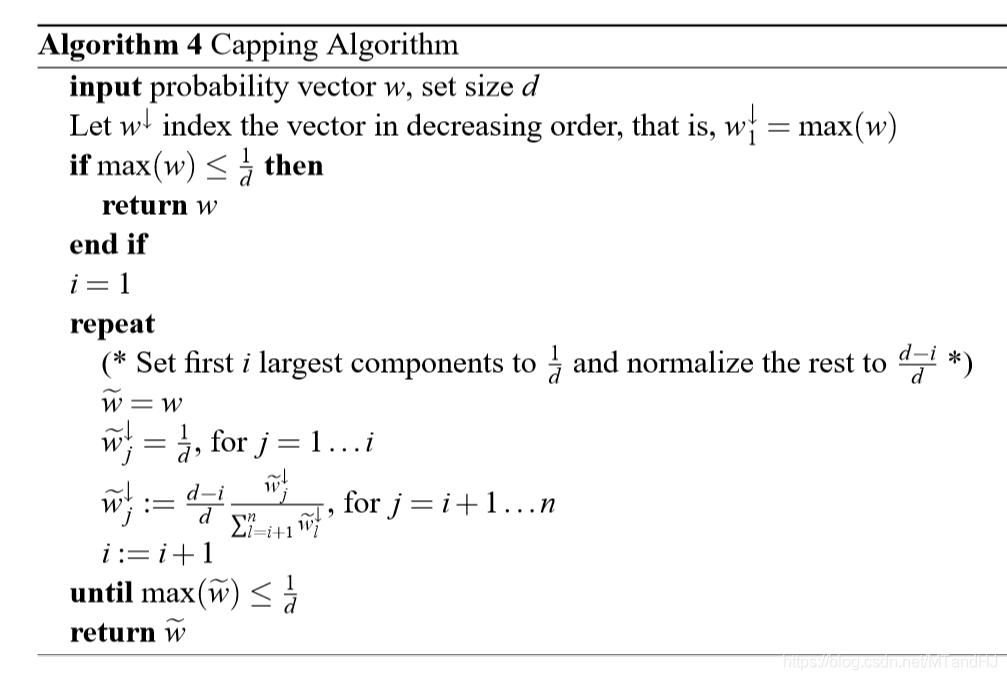
(mathbf{w} in B_d^n)是指(|mathbf{w}|=mathop{sum}limits_{i}mathbf{w}_i=1),且(0 leq mathbf{w}_i leq frac{1}{d})
为了使(mathbf{w} in B_d^{n}),有下面的算法:
接下来就是结合上面的分解所得到的改进的Hedge算法:
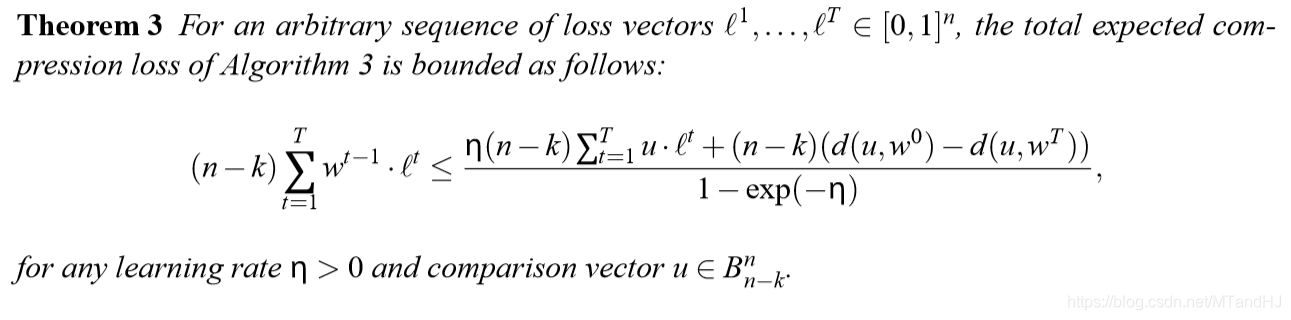
有一个性质:
用于矩阵
定义:

矩阵(d)-corner是指(A)的特征值,有且仅有(d)个非零项,且均为(frac{1}{d})。
其他的类似定义。
这里的(W)是密度矩阵:对称正定矩阵,且迹为1。
则:

(mathbf{log}A=mathop{sum}limits_ilog(lambda_i)a_ia_i^{ op}), 如果(A=mathop{sum}limits_ilambda_ia_ia_i^{ op})
(mathbf{exp}A)同理。
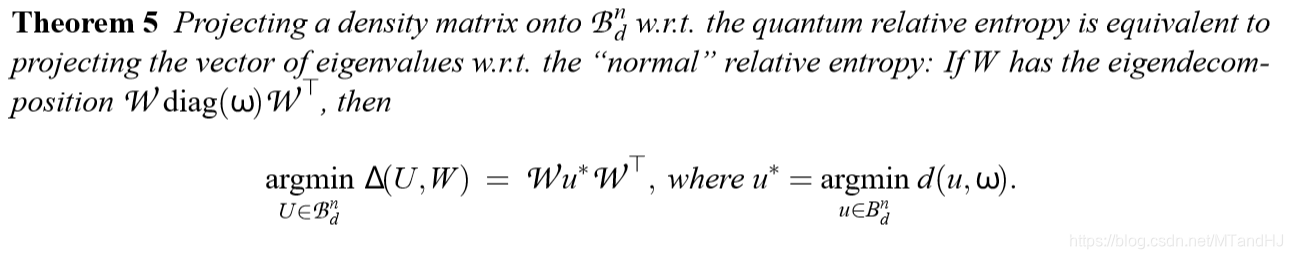
这个算法貌似是为了将(W)投影到(B_d^{n})中的理论依据。
下面的算法五,就是关于如何利用(W)进行PCA:
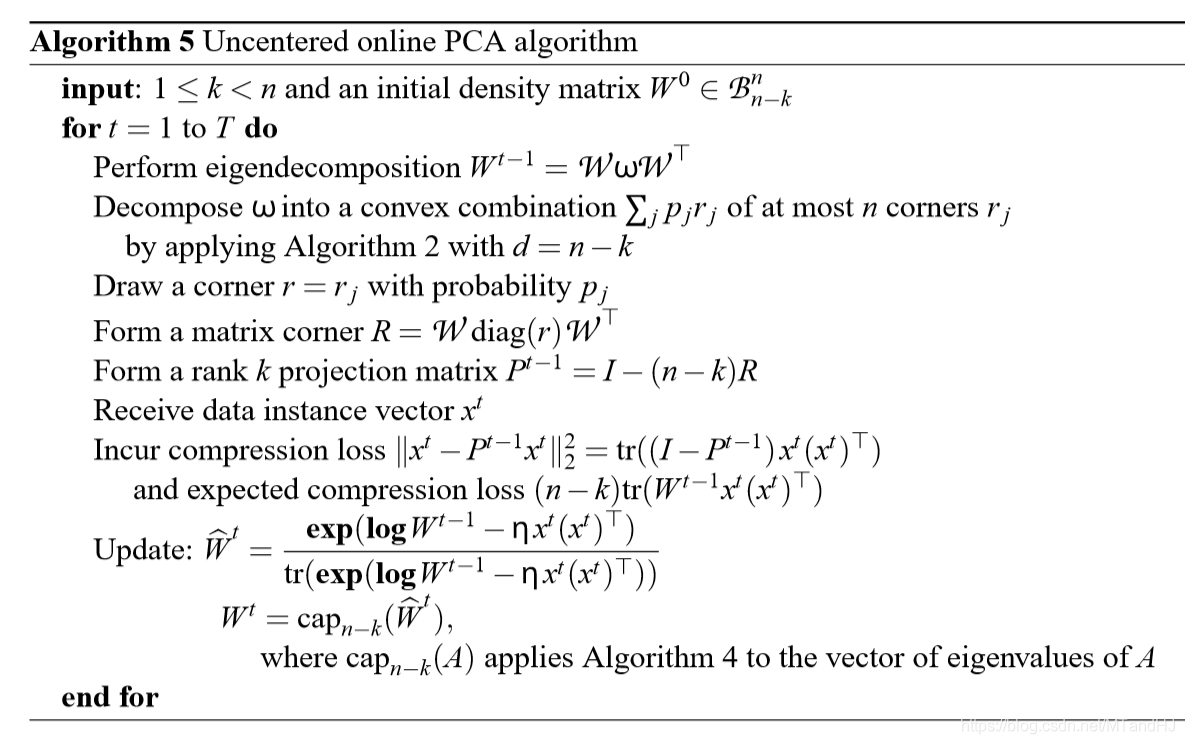
(rounding())
那么如何将上面的种种算法应用到之前提到的文章呢。之前的文章说,算法二就可以了,所以是这么理解吗?
最后得到的矩阵,根据特征值,得到概率向量(mathbf{w}),然后再进行分解,通过概率(p_i),得到(r_i),接着,舍弃这些特征向量,得到最后的投影矩阵(P)?
但是,用特征值,总觉得和上面的不大相符,可不用特征值又能用什么呢?因为他们都是在最后一步利用这个(rounding())。但是,用算法五,就和他们本身的算法不一致了,具体如何,不得而知了。