所谓蜂窝状网格,也就是由多个六边形组成的类似蜂窝的网格,在一些游戏地图编辑器,手机触摸屏,泡泡龙游戏等场景可以看到使用这种蜂窝网格。对于普通的矩形网格来说(例如俄罗斯方块,贪吃蛇的棋盘),由于屏幕和位图在逻辑上的点阵模型,使得矩形网格的定位非常简便。矩形网格如果按照边连接,具有 4 临域(上下左右),而按照顶点连接,具有 8 临域(在前者基础上加上对角线);蜂窝网格的行间是一种错位关系,这使得我们编程建立数据结构模型时带来一点不便。下面仅从直观观察描述该网格(实际编程实现时还需要根据具体情况而定)。蜂窝网格具有 6 临域,例如在下面的图中,就是左,右,上偏左,上偏右,下偏左,下偏右。当我们把蜂窝网格的数据也用数组存储时,蜂窝网格的临域和存储结构有关。如下图在行间交错的情况下,6 临域是在 8 临域 的基础上去掉了两个元素(去掉的元素根据所在奇数行和偶数行有所不同),在编程时这些是需要注意的地方。
蜂窝网格的捕获并不是那么直观的,本文将讲解如何在蜂窝网格定位,换句话说,也就是给定一个屏幕坐标,需要判断哪个网格被该坐标选中。首先我们来看蜂窝网格定位的原理,由下图所示:

在上面的蜂窝网格上,我用蓝色线条绘制了一张矩形网格(暂时称为网格A)。并用蓝色圆点在图上标记了每个蜂窝网格的中心点。我们根据给定的坐标(x,y)可以首先定位到网格A中的某个矩形网格,然后观察“网格A”和“蜂窝网格”的关系可以发现,每个网格A的矩形网格的边缘上都分布了三个蜂窝网格的中心点。这样我们就可以在这三个点中找出与(x,y)点距离最近的点,也就完成了蜂窝网格定位。
需要注意的是,蜂窝网格由于存在一种错位关系,因此蜂窝网格的中心点落到矩形网格A上时,是行间交替变化的。例如在我所画的这张图上,我在图片右侧绘制除了网格A的纵坐标为奇数和偶数时的蜂窝点分布情况。在捕获蜂窝网格时,必须针对这一点特别处理。
网格A中的单个矩形网格宽度和高度在代码中分别是 g_unitx 和 g_unity; 它们分别是 网格A 在两个方向上的长度单位。 假设六边形的边长为 a ,则:
g_unitx = a * sqrt (3) ; g_unity = a * (3/2) ;
下面我们就给出捕获蜂窝网格的重要代码: void GetCell(int x, int y, int *lpCellX, int *lpCellY); (x,y)通常为鼠标的当前位置,调用后,通过 lpCellX 和 lpCellY 参数返回被捕获的网格的中心点坐标。
#pragma once #include "stdafx.h" //蜂窝网格的定位方法 -- by hoodlum1980 //假设六边形的边长为a; //两个方向的矩形定位的基本单位 #define unitx(a) ((a)*1.7320508) //sqrt(3) * a #define unity(a) ((a)*1.5) //1.5 * a //两个方向的矩形网格基本单位 double g_unitx; double g_unity; double g_MinDistance2; // (a*sqrt(3)/2)^2 //设置六边形的边长 void SetCellSize(int a) { if(a>0) { g_unitx = unitx(a); g_unity = unity(a); //二分之根号3 边长的平方,如果距离比它还小,就必然捕获 g_MinDistance2 = a*a*0.75; } } //求取两个点的距离平方 inline int distance2(int x1, int y1, int x2, int y2) { return ((x2-x1)*(x2-x1) + (y2-y1)*(y2-y1)); } //输入鼠标按下的点坐标(x,y) //返回被捕获六边形的中心坐标 void GetCell(int x, int y, int *lpCellX, int *lpCellY) { //位于矩形网格边线上的三个CELL中心点 POINT points[3]; //当前距离 int dist; int mindist= (int)(g_MinDistance2 * 100); //一个非常大的值 int i, index;//index:被捕获的索引 //计算出鼠标点位于哪一个矩形网格中 int cx = (int)(x/g_unitx); int cy = (int)(y/g_unity); points[0].x = (int)(g_unitx * cx); points[1].x = (int)(g_unitx * (cx+0.5)); points[2].x = (int)(g_unitx * (cx+1)); //根据cy是否是偶数,决定三个点的纵坐标 if(cy % 2 == 0) { //偶数时,三个点组成倒立三角 points[0].y = points[2].y = (int)(g_unity * cy); points[1].y = (int)(g_unity * (cy+1)); } else { //奇数时,三个点组成正立三角 points[0].y = points[2].y = (int)(g_unity * (cy+1)); points[1].y = (int)(g_unity * cy); } //现在找出鼠标距离哪一个点最近 for(i=0;i<3;i++) { //求出距离的平方 dist = distance2(x,y, points[i].x, points[i].y); //如果已经肯定被捕获 if(dist < g_MinDistance2) { index = i; break; } //更新最小距离值和索引 if(dist < mindist) { mindist = dist; index = i; } } //现在index 就是被捕获的结果 *lpCellX = points[index].x; *lpCellY = points[index].y; } //给出蜂窝CELL的中心点和边长a,填充Cell的六边形的六个端点 void GetCellPoints(int cellx, int celly, int a, POINT *lpPoints) { if(lpPoints == NULL) return; lpPoints[0].x = cellx; lpPoints[0].y = celly - a; lpPoints[1].x = cellx + (int)(g_unitx*0.5); lpPoints[1].y = celly - a/2; lpPoints[2].x = lpPoints[1].x; lpPoints[2].y = celly + a/2; lpPoints[3].x = cellx; lpPoints[3].y = celly + a; lpPoints[4].x = cellx - (int)(g_unitx*0.5); lpPoints[4].y = celly + a/2; lpPoints[5].x = lpPoints[4].x; lpPoints[5].y = celly - a/2; }
除了上面我实现的距离法以外,我们还可以根据角度法,求出被捕获的CELL;原理如下图所示:
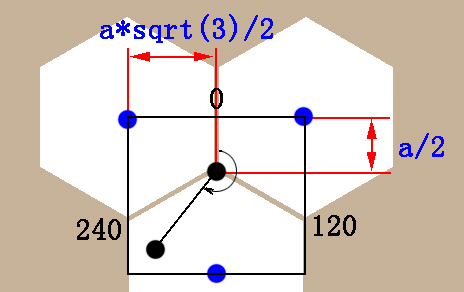
如上图所示,很显然,同样要区分 y 是偶数还是奇数。这里我们就其中一种情况讨论,在上图中,我们可以很容易获取到三个 CELL 的交界点的坐标:
ox = g_unitx * x + a * sqrt(3)/2;
oy = g_unity * y + a/2;
然后我们求出鼠标点和交界点的偏离12点的角度值:(需要考虑y轴和笛卡尔坐标的方向相反,还要考虑点所在的象限,这里我们简单起见,不去讨论)
alpha = 90 - atan( (oy - y) / (x - ox)) ;
if (alpha < 0) alpha += 180 ;
然后根据该角度落在的区间,得出被捕获的 CELL 的中心点坐标;
这种实现方法需要考虑的情况要比距离法更复杂,不易读一些,因此这里我就不去尝试写出完成的代码了。
下面我给出一个 Windows 应用程序作为上面的代码的演示,该程序首先绘制一副蜂窝网格图背景,然后当鼠标在窗口上移动时,窗口实时的反馈被鼠标捕获的网格(用蓝色显示),程序运行效果如图:

该范例的源代码下载链接:
http://files.cnblogs.com/hoodlum1980/BeehiveCell.rar