一、mykernel 实验 :
1.深度理解函数调用堆栈:
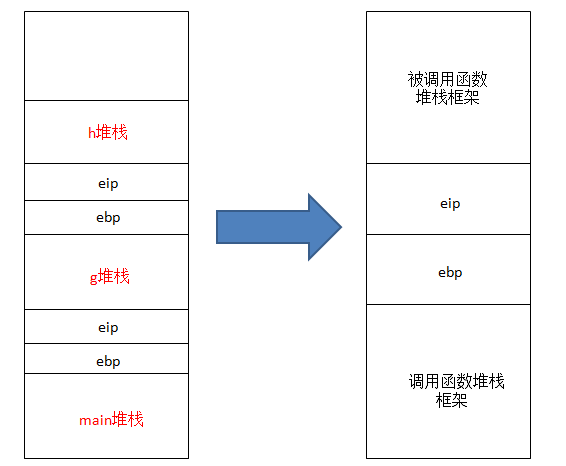
上周已经一步步地分析过含有变量的函数调用时堆栈的变化,现在对堆栈框架进行一些补充,以以下程序为例:
int main()
{
...
g(x,y);
...
}
int g(int x,int y)
{
h(c);.
}
int h(int x)
{
...
}
大致栈空间以及自己领会的函数调用堆栈变化框架:
2.时间片轮转多道程序代码分析:
计算机工作的三个法宝是存储程序计算机、函数调用堆栈、中断机制。mykernel 启动后,会调用 my_start_kernel 函数,完成进程的初始化,时钟中断周期性地调用 my_timer_handler函数,完成进程的调度。
扩展 my_start_kernel 和 my_timer_handler 函数,即修改 mymain.c 和 myinterrupt.c,新增 mypcb.h,模拟时间片轮转的多道程序,现在将内核核心代码加以分析:
mypcb.h
struct Thread {
unsigned long ip;
unsigned long sp;
};
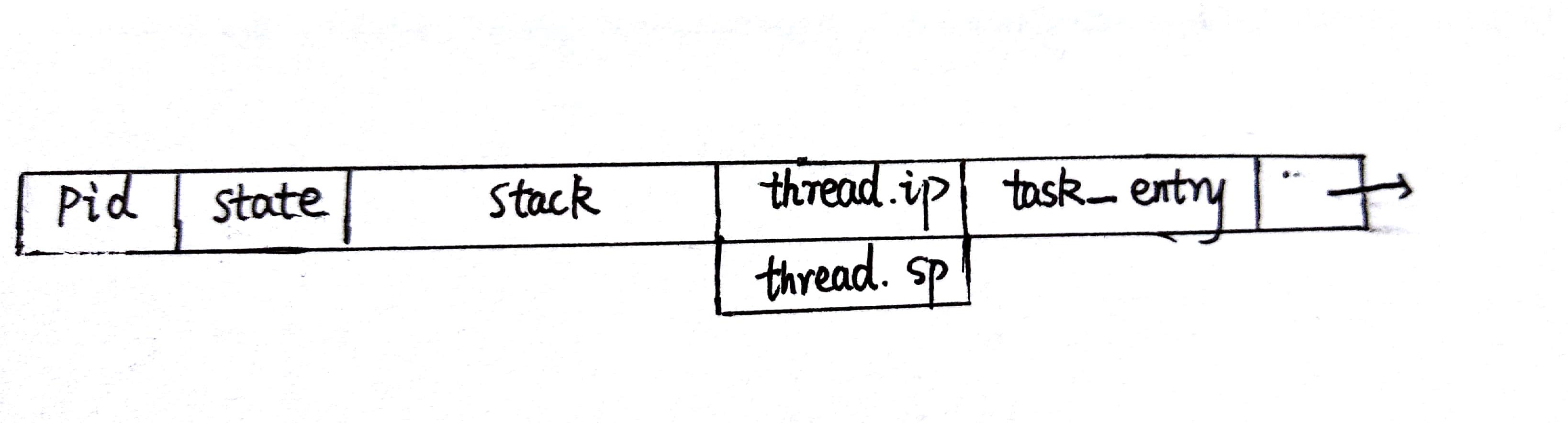
typedef struct PCB{
int pid; //进程的id号
volatile long state; //进程的状态
char stack[KERNEL_STACK_SIZE]; //进程的栈
struct Thread thread; //Thread 结构体
unsigned long task_entry; //进程的起始入口地址
struct PCB *next; //指向下一个进程的指针
}tPCB;
void my_schedule(void); //此函数执行进程调度
定义了PCB结构体,包括进程号、状态、堆栈、Thread结构体、入口地址、next指针。
mymain.c
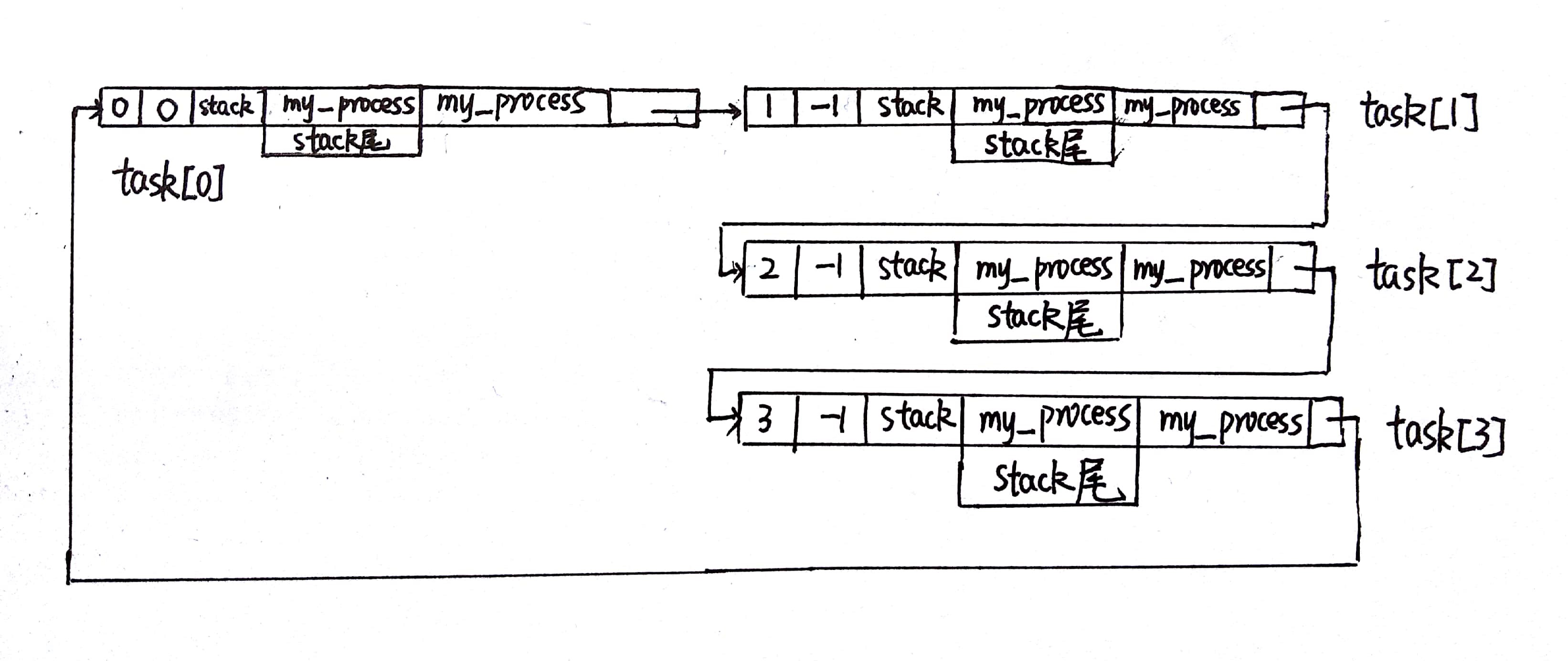
(1)初始化所有进程,使成为循环链表:
#include "mypcb.h"
tPCB task[MAX_TASK_NUM]; //定义4个进程
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void); //每10000000 来进行进程调度,调用my_schedule
void __init my_start_kernel(void)
{
int pid = 0;
int i;
task[pid].pid = pid; //0号进程pid设为0
task[pid].state = 0; //0号进程state设为可运行
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;//0号进程的ip和入口地址设为my_process();
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];//0号进程的栈顶为stack数组的最后一个元素
task[pid].next = &task[pid]; //next指针指向自己
for(i=1;i<MAX_TASK_NUM;i++) //1,2,3号进程复制0号进程
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i]; //所有进程成为一个循环链表
}
pid = 0;
my_current_task = &task[pid]; //当前运行的进程设为0号进程
);
}
(2)0号线程的启动:
asm volatile(
"movl %1,%%esp
" //esp指向stack数组的末尾
"pushl %1
" //将task[0].thread.sp压栈
"pushl %0
" //将task[0].thread.ip压栈
"ret
" //eip指向0进程起始地址,启动0号进程
"popl %%ebp
" //释放栈空间
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp)
myinterrupt.c
my_timer_handler 函数每隔1000产生一个中断并把 my_need_sched 设置为1,此时 mymain.c 中 my_process 函数调用my_schedule 调度程序进行进程切换。
(1)时钟中断:
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<
");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
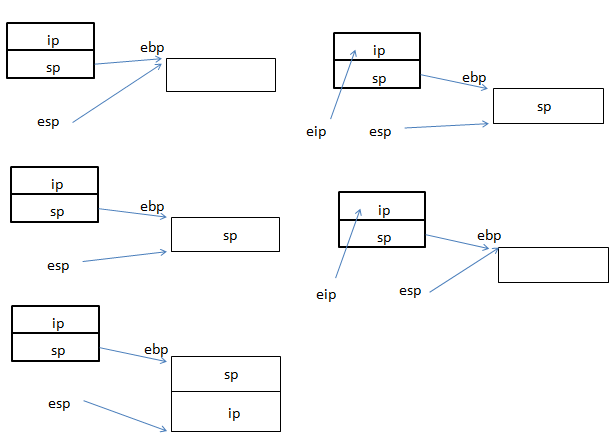
(2)进程调度
if(next->state == 0) //下一个进程可运行,执行进程切换
{
/* switch to next process */
asm volatile(
"pushl %%ebp
" //保存当前进程的ebp
"movl %%esp,%0
" //将当前进程的esp储存到当前进程的thread.sp
"movl %2,%%esp
" //esp指向下一个进程
"movl $1f,%1
" //将1f存储到thread.sp.$1f是“1: ”处,再次调度到该进程时就会从1:开始执行
"pushl %3
" //将下一个进程的thread.ip压栈
"ret
" //eip指向下一个进程的起始地址
"1: "
"popl %%ebp
" //待下一个进程执行完后释放栈空间,恢复现场
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<
",prev->pid,next->pid);
当下一个进程一次也没运行过,执行else后的语句:
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<
",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp
" /* save ebp */
"movl %%esp,%0
" /* save esp */
"movl %2,%%esp
" /* restore esp */
"movl %2,%%ebp
" /* restore ebp */
"movl $1f,%1
" /* save eip */
"pushl %3
"
"ret
" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
思考:
(1)相比if,else多了 "movl %2,%%ebp
",少了"popl %%ebp
",即将esp和ebp指向同一位置,并不恢复原进程,所以此部分是由于进程未运行过,所以要开始执行一个新进程;
(2)此部分的"movl $1f,%1
"是将进程原来的ip(my_process)替换为$1f,使得它被切换回来(运行状态)进入if,可从标号1:处继续执行[参考Linux内核分析];
(3)为什么定义Thread时设置sp和ip保存esp和sip,而不设置bp来保存ebp呢?
pushl $ebp压栈保存现场,popl $ebp出栈恢复现场,不需要单独设置变量来保存ebp就可完成,而eip和esp在进程切换中需要不停地变动,必须设置变量来保存。
总结:操作系统内核从一个起始位置开始执行,完成初始化操作后,开始执行第一个进程。计算机为每个进程分配一个时间片,如果在时间片结束时进程仍在运行,该进程被阻塞,保存现场后切换到另一个进程,执行完后再返回原进程执行,从而完成进程调度。
二、课本内容总结:
进程是操作系统的核心。在Linux系统中,进程和线程不做特别区分,线程是一种特殊的进程。进程存放在每一项类型为 task_struct(进程描述符,包括进程的地址空间、挂起的信号、状态等)的双向循环链表中,在内核栈的尾部创建 thread_info 结构,通过计算偏移间接查找进程描述符。父进程通过调用fork()(fork()使用写时拷贝页实现,即不复制整个进程的地址空间,让父进程和子进程共享同一个拷贝)复制本进程来创建新进程,exec()读取可执行文件并将其载入地址空间开始执行,最终,程序通过exit()系统调用退出执行(如果父进程在子进程前退出,必须为其找到合适的养父进程)。
系统调用在用户空间进程和硬件设备之间添加了一个中间层。程序员只需和API打交道,内核只和系统调用打交道。访问系统调用,通常用C库中定义的函数调用来进行。每个系统调用被赋予了一个独一无二且不能更改的系统调用号,执行系统调用后陷入内核(内核代表进程执行并处于进程上下文),传递系统调用号和参数,执行系统调用函数,并把返回值带回用户空间。“提供机制而不是策略”,系统调用抽象出用于完成某种目的的函数,至于函数如何使用不需要关心。
注:在学习进程上下文时搜索到了中断上下文,对二者进行比较:用户空间与内核空间,进程上下文与中断上下文。
三、未解决问题:
(1)0号进程的启动中"pushl %1
" 是将0号进程的 thread.sp 压栈,这里为什么要将 sp 压栈?孟老师说因为是空栈所以 esp 和 ebp 相同。那 thread.sp 是指针吗? "movl %1,%%esp
" 将esp指向 thread.sp,即 esp 和 thread.sp 相同,所以 ebp 和 thread.sp 相同,压 thread.sp 相当于压 ebp,可以这样理解吗?
(2)PCB结构体定义了stack数组,这个数组是本进程的栈吗?如果是,调度程序中保存当前进程的ebp和eip是压入当前进程的栈还是下一个进程的栈,亦或是各自压入两个栈?
希望老师和看到的同学能帮我解决一下,谢谢啦!