首先是main函数
#include <iostream>
#include <opencv2/opencv.hpp>
#include "ArmorPlate.h"
using namespace std;
using namespace cv;
bool CameraRead(ArmorPlate& armor_param);
int main()
{
ArmorPlate armor;
armor.CameraInit(0);
//while (1)
//{
//if (!CameraRead(armor))
//continue;
armor.AutoShoot();
//}
return 0;
}
bool CameraRead(ArmorPlate& armor_param)
{
armor_param.capture_plate.read(armor_param.armor_image);
if (!armor_param.armor_image.data)
{
cout << "The camera has not read a image!" << endl;
armor_param.CameraInit(0);
return false;
}
else
return true;
}
之后是头文件:
#pragma once
#define BLUETEAM 0
#define REDTEAM 1
class ArmorPlate
{
public:
cv::Mat pre_image;
cv::Mat armor_image;
cv::VideoCapture capture_plate;
int myteam;
ArmorPlate();
bool CameraInit(int device);
void AutoShoot();
private:
void ImgPreprosses(const cv::Mat& src, const cv::Mat& dst);
};
class ArmorRect
{
public:
cv::RotatedRect armors;
};
之后就是CPP文件:
#include <opencv2/opencv.hpp>
#include "ArmorPlate.h"
using namespace std;
using namespace cv;
ArmorPlate::ArmorPlate()
{
myteam = REDTEAM;
}
bool ArmorPlate::CameraInit(int device)
{
capture_plate.open(device);
if (!capture_plate.isOpened())
{
cout << "The capture has something wrong!";
return false;
}
else return true;
}
cv::RotatedRect& adjustRec(cv::RotatedRect& rec)
{
using std::swap;
float& width = rec.size.width;
float& height = rec.size.height;
float& angle = rec.angle;
while (angle >= 90.0) angle -= 180.0;
while (angle < -90.0) angle += 180.0;
if (angle >= 45.0)
{
swap(width, height);
angle -= 90.0;
}
else if (angle < -45.0)
{
swap(width, height);
angle += 90.0;
}
return rec;
}
void ArmorPlate::AutoShoot()
{
armor_image = imread("2.jpg");
ImgPreprosses(armor_image, pre_image);
imshow("原图", armor_image);
//imshow("预处理图", pre_image);
waitKey(0);
}
void drawall(vector<RotatedRect> rec,Mat img)
{
for (int i = 0; i < rec.size(); i++)
{
Point2f p[4];
rec[i].points(p);
line(img, p[0], p[1], Scalar(0, 0, 255), 1, 8, 0);
line(img, p[1], p[2], Scalar(0, 0, 255), 1, 8, 0);
line(img, p[2], p[3], Scalar(0, 0, 255), 1, 8, 0);
line(img, p[3], p[0], Scalar(0, 0, 255), 1, 8, 0);
}
}
void ArmorPlate::ImgPreprosses(const Mat& src, const Mat& dst)
{
Mat grayImg;
Mat binBrightImg;
vector<RotatedRect> lightInfos;
double MaxValue;
vector<Mat> channels;
//split(src, channels);
//if (myteam == REDTEAM)
//{
// grayImg = channels.at(0)- channels.at(2);
// blur(grayImg, grayImg, Size(3, 3));
// //grayImg *= 3;
//}
//else
// grayImg = channels.at(2) - channels.at(0);
//imshow("灰度图",grayImg);
//minMaxLoc(grayImg, 0, &MaxValue, 0, 0);waitKey(0);
//threshold(grayImg, binBrightImg, MaxValue*0.85, 255, THRESH_BINARY);//THRESH_BINARY
////CV_THRESH_OTSU不可用,因为该方法用于区分前景和后景
//Mat element = getStructuringElement(MORPH_RECT,Size(3,3));
//morphologyEx(binBrightImg, binBrightImg, MORPH_DILATE, element, Point(-1, -1), 1);
////dilate(binBrightImg, binBrightImg, element);
//morphologyEx(binBrightImg, binBrightImg, MORPH_OPEN, element,Point(-1,-1),3);
////morphologyEx(binBrightImg, binBrightImg, MORPH_DILATE, element, Point(-1, -1), 1);
//morphologyEx(binBrightImg, binBrightImg, MORPH_CLOSE, element, Point(-1, -1), 3);
////medianBlur(binBrightImg, binBrightImg, 11);
////dilate(binBrightImg, binBrightImg, element);
//imshow("二值图", binBrightImg);waitKey(0);
//方法2//
Mat HSVImg;
Mat image;
cvtColor(src, HSVImg, COLOR_BGR2HSV);
split(HSVImg, channels);
minMaxLoc(channels[2], 0, &MaxValue, 0, 0);
threshold(channels[2], channels[2], MaxValue*0.98, 255, THRESH_BINARY);
Mat element = getStructuringElement(MORPH_RECT, Size(5, 5));
medianBlur(channels[2], channels[2], 3);
morphologyEx(channels[2], channels[2], MORPH_DILATE, element, Point(-1, -1), 1);
imshow("V通道二值图", channels[2]); waitKey();
HSVImg.copyTo(image, channels[2]);
int BLowH = 80;
int BHighH = 150;
int BLowS = 60;
int BHighS = 255;
int BLowV = 100;
int BHighV = 255;
//inRange(image, Scalar(BLowH, BLowS, BLowV), Scalar(BHighH, BHighS, BHighV), binBrightImg);
//imshow("二值图", binBrightImg); waitKey(0);
binBrightImg = channels[2];
//方法2结束//
vector<vector<Point>> lightContours;
cv::findContours(binBrightImg.clone(), lightContours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
Mat drawingImg = Mat::zeros(src.size(), CV_8UC3);
for (int i = 0; i < lightContours.size(); i++)
drawContours(drawingImg, lightContours, i, Scalar(0, 255, 0));
imshow("轮廓图", drawingImg); waitKey(0);
lightInfos.clear();
for (const auto& contour : lightContours)
{
float lightContourArea = contourArea(contour);
if (contour.size() <= 5 ||lightContourArea <10 ) continue;
RotatedRect lightRec = fitEllipse(contour);
RotatedRect minAreaRec = minAreaRect(contour);
adjustRec(lightRec);
if ((lightRec.size.width / lightRec.size.height) >0.8)
continue;
int x = lightRec.center.x - lightRec.size.width;
if (x < 0)
continue;
int y = lightRec.center.y - lightRec.size.height;
if (y < 0)
continue;
//cout << lightRec.angle << endl;
//RotatedRect s;
//s.angle = lightRec.angle;
//s.center = lightRec.center;
//if (minAreaRec.size.width > minAreaRec.size.height)
//{
// s.size.height = minAreaRec.size.width;
// s.size.width = minAreaRec.size.height;
// //lightRec.angle += 90;
//}
//else
//{
// s.size.height = minAreaRec.size.height;
// s.size.width = minAreaRec.size.width;
//
//}
//
//if (lightRec.size.width > lightRec.size.height)
//{
// swap(lightRec.size.width, lightRec.size.height);
//}
if (lightRec.size.width / lightRec.size.height > 1.0 ||
lightContourArea / lightRec.size.area() < 0.5)
continue;
lightRec.size.width *= 1.1;
lightRec.size.height *= 1.1;
Rect boundRect = lightRec.boundingRect();
Mat lightImg = src(boundRect);
if((lightRec.size.height>10&& (lightRec.size.height < 150)&&(lightRec.angle<45||lightRec.angle>135)))
lightInfos.push_back(lightRec);
}
vector<RotatedRect> armors;
vector<ArmorRect> armorRects;
ArmorRect armorRect;
armors.clear();
armorRects.clear();
if (lightInfos.size()<=1)
{
cout << "There's no light contours in quality." << endl;
}
sort(lightInfos.begin(), lightInfos.end(), [](const RotatedRect& ld1, const RotatedRect& ld2)
{
return ld1.center.x < ld2.center.x;
});
for (int i = 0; i < lightInfos.size(); i++)
{
for (int j = i + 1; j < lightInfos.size(); j++)
{
const RotatedRect& left = lightInfos[i];
const RotatedRect& right = lightInfos[j];
double heightDiff = abs(left.size.height - right.size.height);
double widthDiff = abs(left.size.width - right.size.width);
double angleDiff = abs(left.angle - right.angle);
double yDiff = abs(left.center.y - right.center.y);
double xDiff = abs(left.center.x - right.center.x);
double meanheight = (left.size.height + right.size.height)/2;
double yDiffRatio = yDiff / meanheight;
double xDiffRatio = xDiff / meanheight;
double dis= sqrt((left.center.x - right.center.x)*(left.center.x - right.center.x) + (left.center.y - right.center.y)*(left.center.y - right.center.y));
double ratio = dis / meanheight;
float heightDiff_ratio = heightDiff / max(left.size.height, right.size.height);
if (angleDiff > 10 || xDiffRatio < 0.5 || yDiffRatio>0.7||ratio>3||ratio<1)
continue;
armorRect.armors.center.x = (left.center.x + right.center.x) / 2;
armorRect.armors.center.y = (left.center.y + right.center.y) / 2;
armorRect.armors.angle= (left.angle + right.angle) / 2;
//cout << left.angle << endl;
//armorRect.armors.angle = 0;
if (180 - angleDiff < 3)
armorRect.armors.angle += 90;
armorRect.armors.size.height= (left.size.height + right.size.height) / 2;
armorRect.armors.size.width = sqrt((left.center.x - right.center.x)*(left.center.x - right.center.x) + (left.center.y - right.center.y)*(left.center.y - right.center.y));
double nL = armorRect.armors.size.height;
double nW = armorRect.armors.size.width;
if (nL < nW)
{
armorRect.armors.size.height = nL;
armorRect.armors.size.width = nW;
}
else
{
armorRect.armors.size.height = nW;
armorRect.armors.size.width = nL;
}
armorRects.emplace_back(armorRect);
armors.push_back(armorRect.armors);
}
}
if (armorRects.empty())
cout << "There is no armor in quality!" << endl;
drawall(armors, src);
imshow("", src);
}
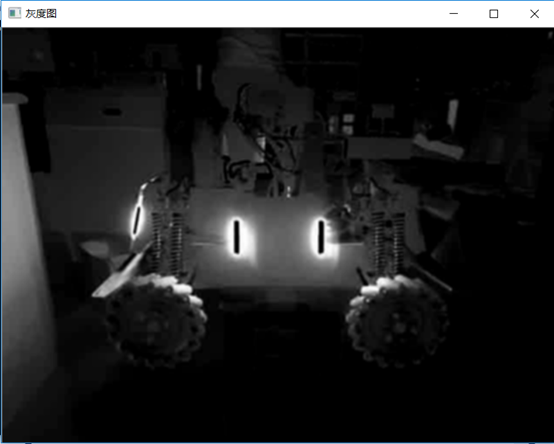
本来一开始在预处理时用的是RGB通道(注释部分),通过RB通道相减(或者带权重的RGB相减),但是效果不好:

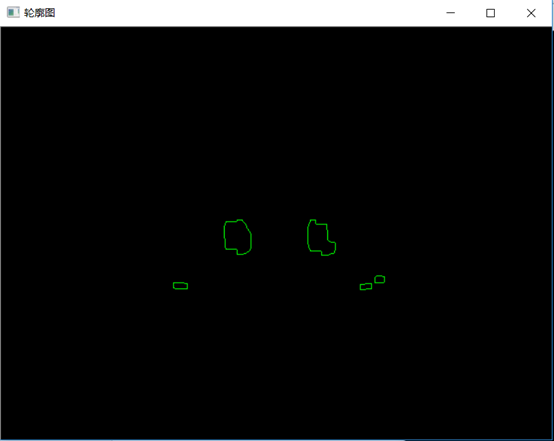

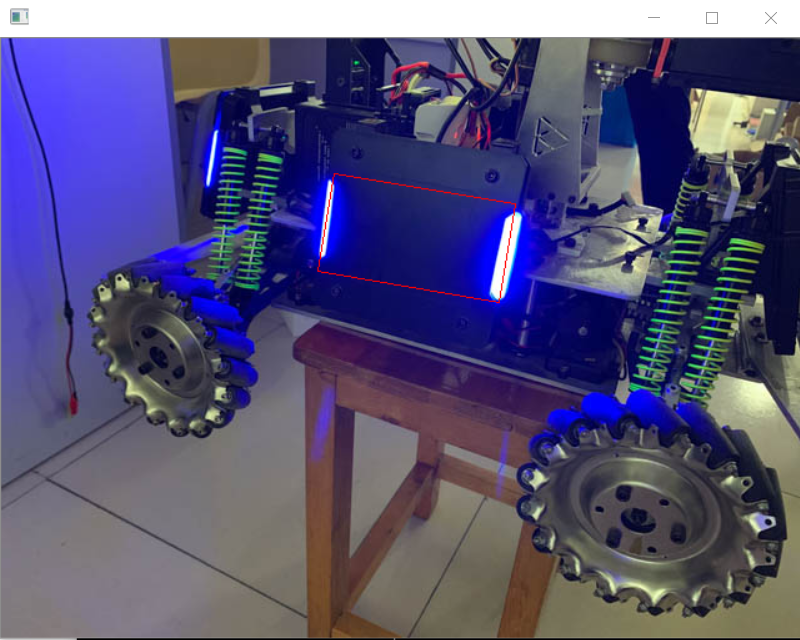
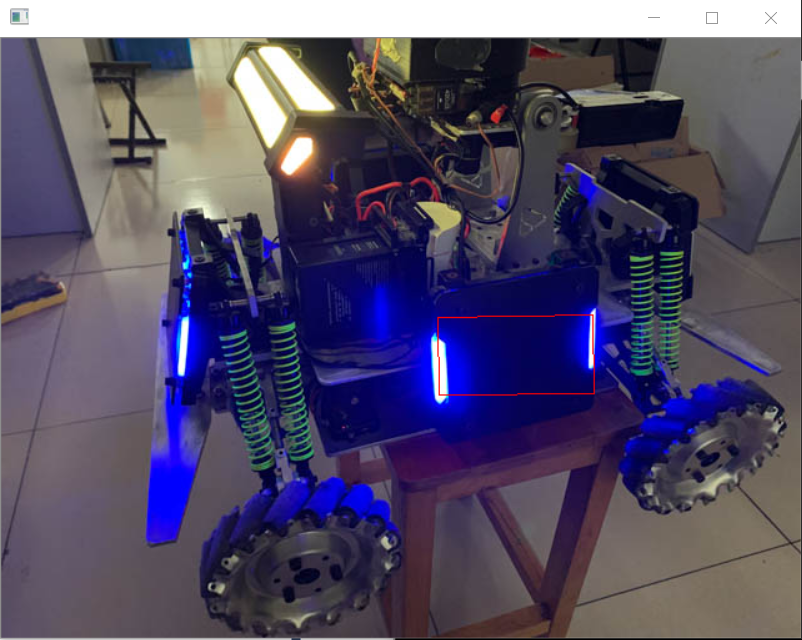
由于预处理去噪填坑将255区的长宽差不够,受蓝色灯光的影响导致椭圆拟合的角度总是不够好,提高阈值和后面调参的效果也不佳。在最后换成了HSV通道的处理,最后在经过一系列的调参工作后,总算得到了还算不错的效果: