标题:相关过滤无人机空中跟踪技术综述与实验评估
作者:Changhong Fu, Geng Lu
链接:Correlation Filter for UAV-Based Aerial Tracking: A Review and Experimental Evaluation
代码:https://github.com/vision4robotics/DCFTracking4UAV?utm_source=catalyzex.com
论文pdf请在公众号【计算机视觉联盟】后台回复【目标跟踪综述】获取
航空跟踪是遥感领域中最活跃的应用之一,它以其无所不在的奉献精神和卓越的性能表现出来。尤其是基于无人机的遥感系统配备了视觉跟踪方法,已广泛应用于航空、航海、农业、交通、公安等领域。如前所述,基于无人机的空中跟踪平台已经从研究阶段逐步发展到实际应用阶段。然而,由于现实环境的挑战,无人机机械结构的振动(特别是在强风条件下),以及有限的计算资源,精度稳健性和高效率都是机载跟踪方法的关键。
近年来,基于鉴别相关滤波器(DCF)的跟踪器以其较高的计算效率和在单CPU上的鲁棒性而备受关注,并在无人机视觉跟踪领域蓬勃发展。本文首先概括了基于DCF的跟踪器的基本框架,在此基础上,根据其解决各种问题的创新,有序总结了20种基于DCF的最新跟踪器。此外,已经对各种流行的无人机跟踪基准进行了详尽和定量的实验,这些基准包括UAV123,UAV123_10fps,UAV20L,UAVDT,DTB70和VisDrone2019-SOT,总共包含371,625帧。最后,总结了当前基于dcf的无人机跟踪器存在的问题,并提出了未来研究的方向。
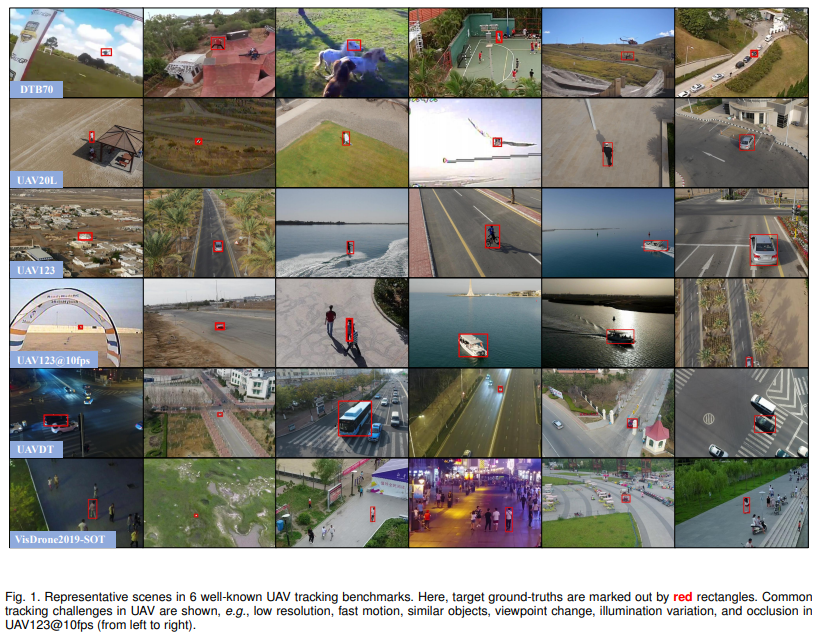
图1展示了具有代表性和挑战性的无人机空中跟踪场景。
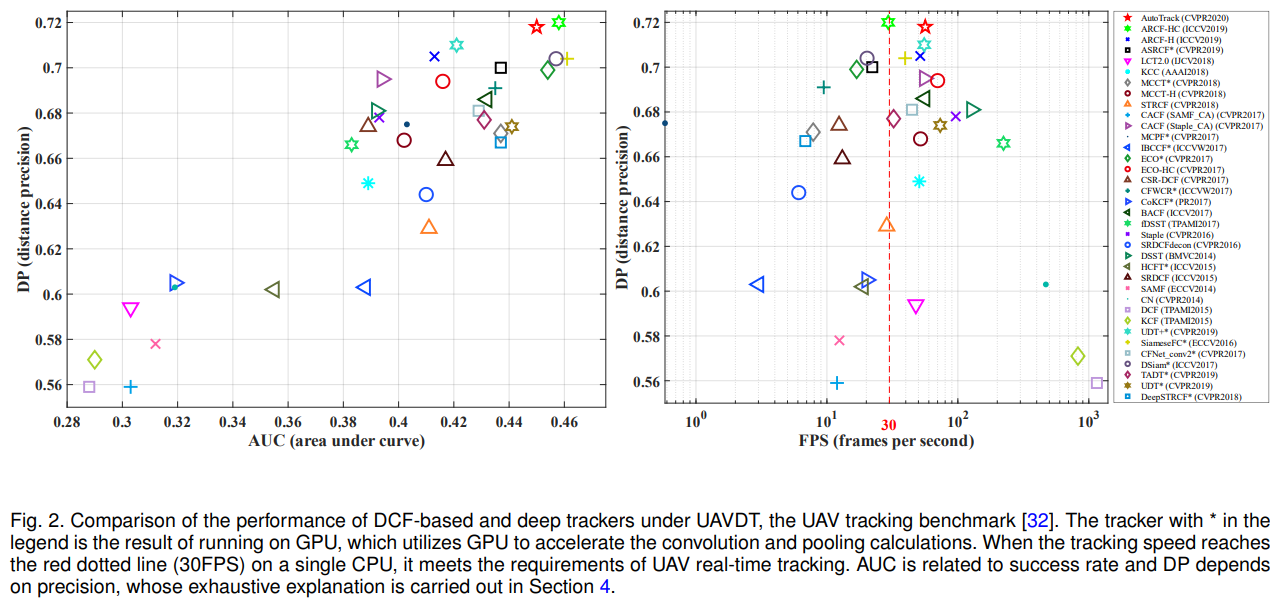
在无人机追踪基准[UAVDT]下,基于DCF的追踪器和深度追踪器的性能比较。图例中带有*的跟踪器是在GPU上运行的结果,利用GPU加速卷积和池化计算。当单CPU上的跟踪速度达到红色虚线(30FPS)时,满足无人机实时跟踪的要求。
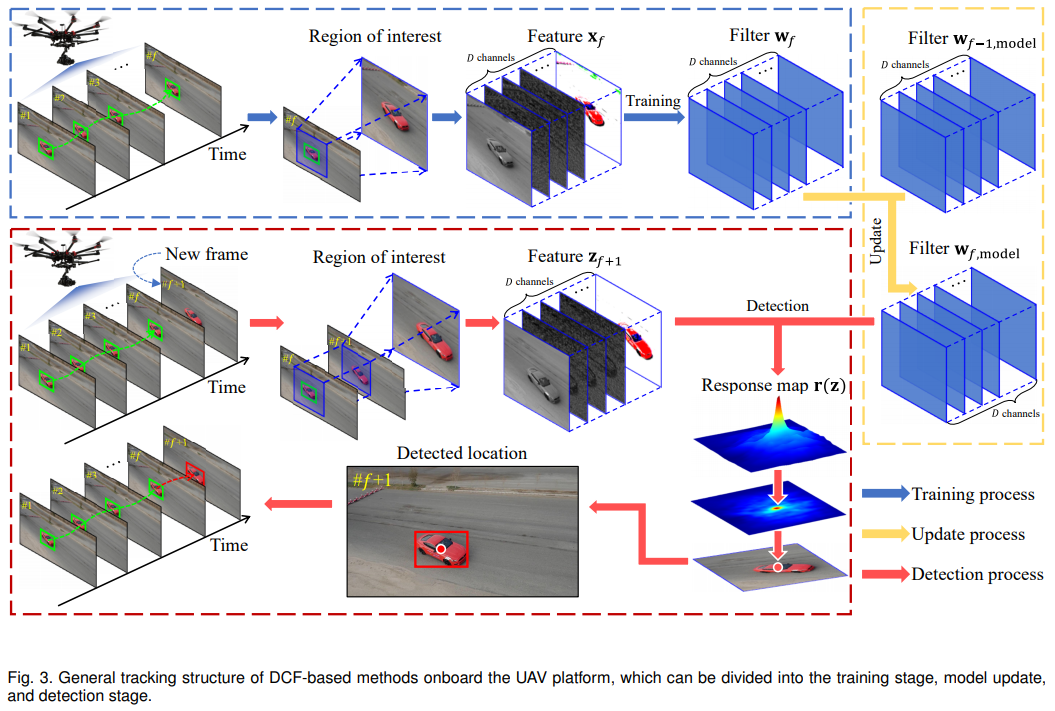
基于dcf的无人机平台上的通用跟踪结构,可分为训练阶段、模型更新阶段和检测阶段
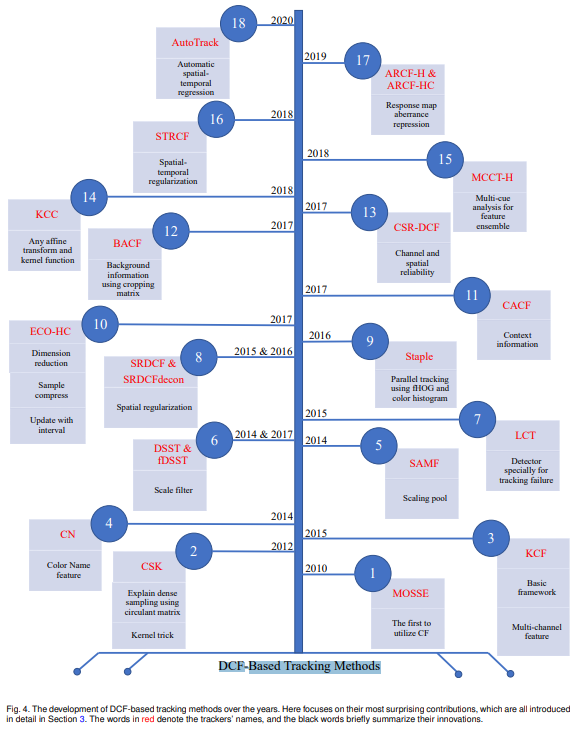
多年来基于dcf的跟踪方法的发展:红色的单词是跟踪方法,黑色的单词是对他们创新的简要总结。
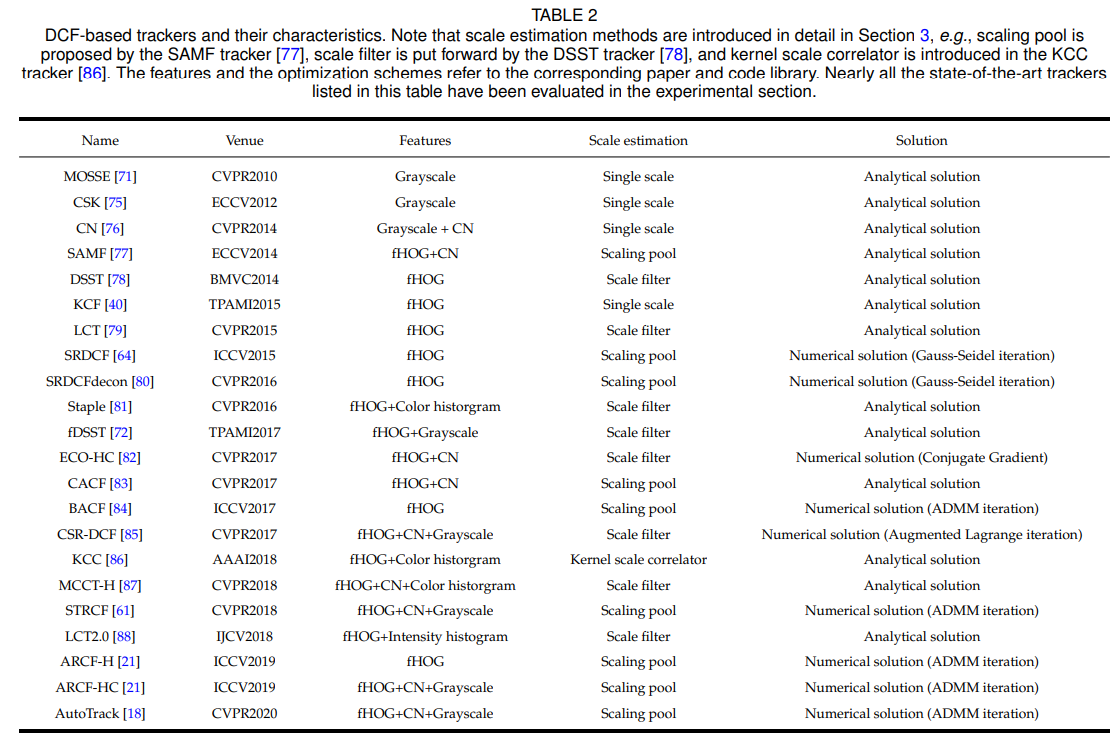
基于DCF跟踪器及其特性:
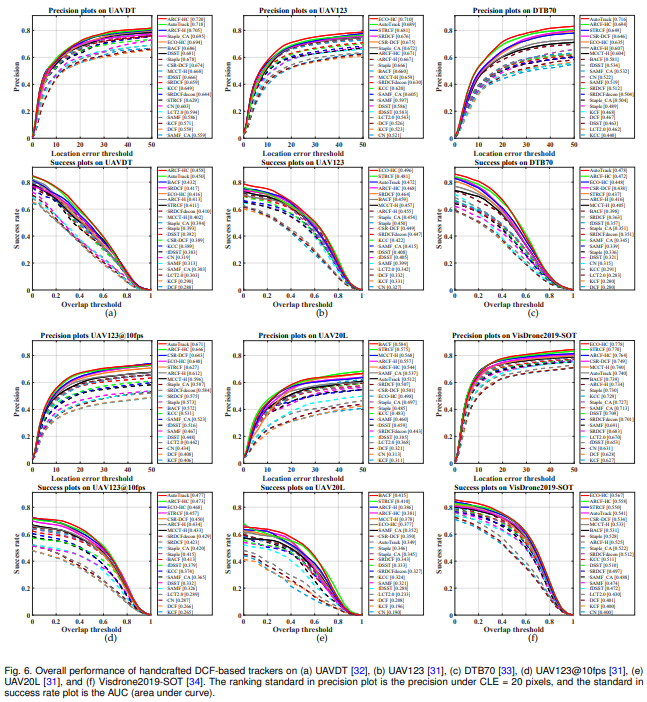
基于DCF的手工跟踪器的一些跟踪结果:
仅作分享,不代表本号立场,侵权联系删除