上的安装说明如下:
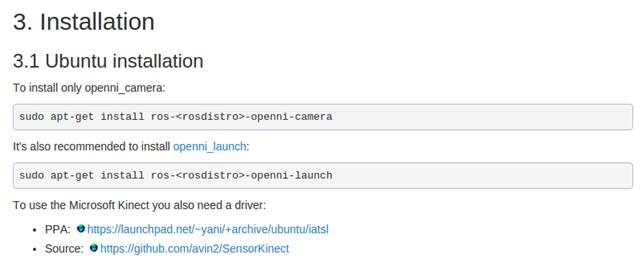
官网上明确写了如果安装windows kinect还需要安装一个驱动,但是有些ROS的书上并没有这么做,只提到了使用如下两步进行安装即可使用:
sudo apt-get install ros-<rosdistro>-openni-camera sudo apt-get install ros-<rosdistro>-openni-launch
我仅使用如上两步安装时候,会发生如下的错误:
"No Device Connected, Waiting for Device to be Connected"
在ROS answers上也有不少人提出这个问题,发生错误的原因就是没有缺少SensorKinect驱动,可以参考:
http://answers.ros.org/question/191594/no-device-connected-waiting-for-device-to-be-connected-error-when-connecting-kinect-with-ubuntu-on-a-virtual-box/
驱动的源码在这里:https://github.com/avin2/SensorKinect
安装驱动
mkdir ~/kinectdriver cd ~/kinectdriver git clone https://github.com/avin2/SensorKinect cd SensorKinect/Bin/ tar xvjf SensorKinect093-Bin-Linux-x64-v5.1.2.1.tar.bz2 cd Sensor-Bin-Linux-x64-v5.1.2.1/ sudo ./install.sh
安装完整后,再运行
roslaunch openni_launch openni.launch
发现还是存在问题,这个应该是USB2.0的端口不支持的原因
USB interface is not supported!
修改GlobalDefaults.ini配置文件
$ sudo gedit /etc/openni/GlobalDefaults.ini
将第60行前面的分号去掉(即取消注释)
;UsbInterface=2
之后就一切正常了
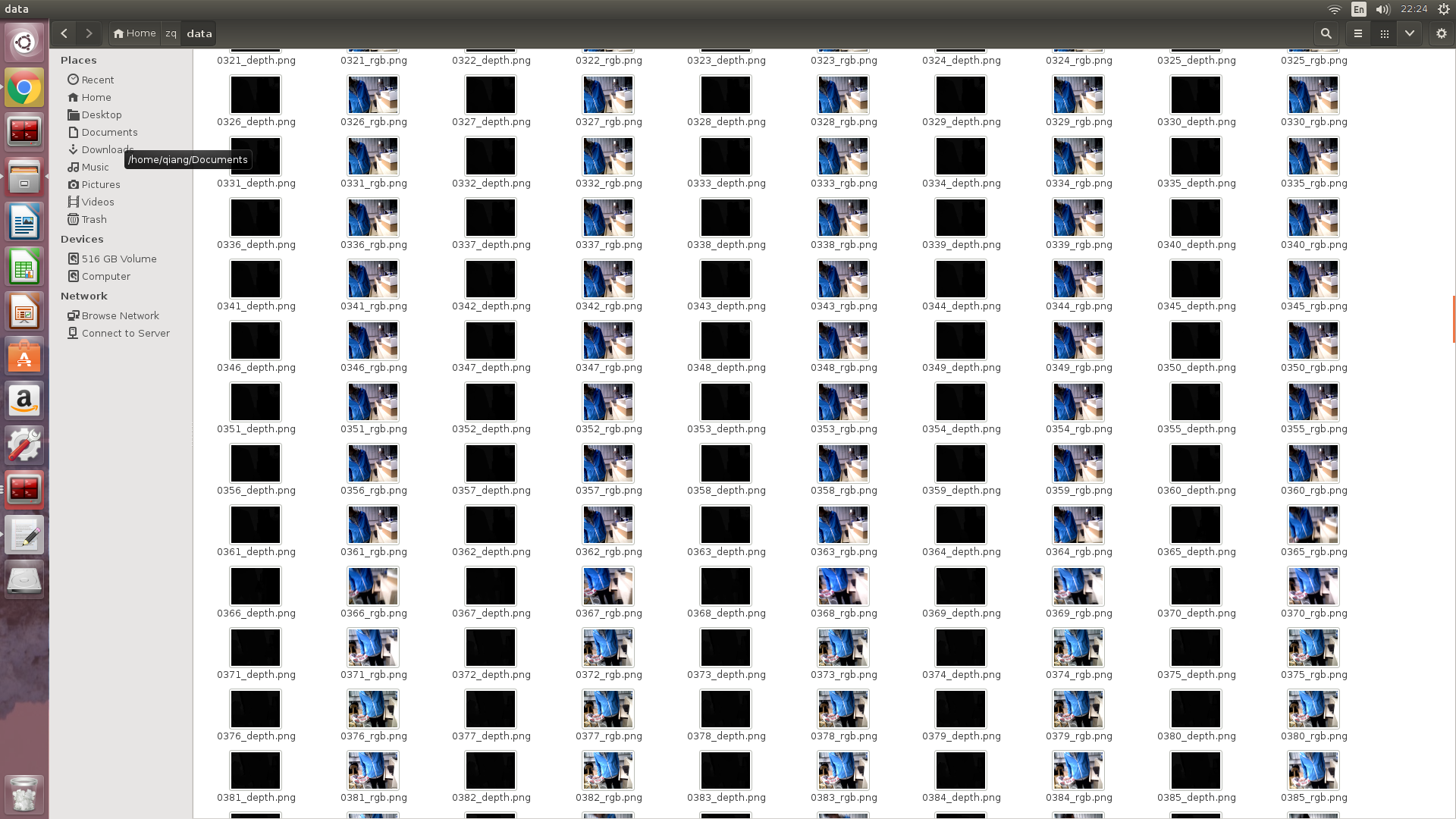
然后可以查看深度图和彩色图信息
如果想看到各种图像的话,可以在终端中输入rqt,这时候会打开一个窗口,在Plugins菜单栏中选择最后一项的image_view,此时可以左侧的下拉菜单中选择话题的种类,注意,默认情况下,选择/camera/depth/XXXX的话题才会显示出来图像,因为你并没有设置depth_registered,如果你在显示的过程中,在新的终端里使用rosrun rqt_reconfiguration rqt_reconfiguration,之后在camera->driver中勾选了depth_registered,此时你的rqt窗口就不会进行图像刷新了,此时切换至/camera/depth_registered/XXXX的话题后,继续会刷新图像。
最后还是要保存Kinect看到的深度图像和彩色图像
找个文件夹
rosrun image_view extract_images _sec_per_frame:=0.1 image:=/camera/rgb/image_color
发现Kinect存储深度图并没有那么简单,保存格式是有问题的。
rosrun image_view image_saver image:=/camera/depth_registered/image_raw _encoding:=16UC1 _filename_format:="image%04i.png"
先写个node试试
https://github.com/GERUNSJ/guardar_imagenes_turtlebot
trick if you want you will get!
/* Este es un nodo de ROS Indigo para guardar imagenes de /camera/depth_registered/image_rect_raw
* y de /camera/rgb/color/image_rect_raw de un Turtlebot1 para luego procesarlas con otro programa.
* Las de profundidad se guardan como unsigned int de 16 bits
* y 1 canal, las de color se guardan como unsigned int de 8 bits en 3 canales.
* Se utiliza un suscriptor sincronizado para guardar el par de imagenes que estén más
* cercanas en el tiempo.
* LAS IMAGENES SE GUARDAN ADONDE SE EJECUTE EL NODO.
* ---------------------------------------------------------
* Creado por Fabricio Emder y Pablo Aguado en el 2016 */
/* This is a ROS Indigo node for saving Turtlebot images from the /camera/depth_registered/image_rect_raw
* and /camera/rgb/color/image_rect_raw topics, for further processing outside of the program.
* Depth images are saved as 1 channel 16 bit unsigned int PNGs (CV_16UC1), and
* RGB images are saved as 3 channel 8 bit unsigned int PNGs (CV_8UC3).
* A synchronized subscriber is used, for saving the pair of images that are most closer in time.
* THE IMAGES ARE SAVED WHEREVER THE NODE IS RUN.
* Created by Fabricio Emder and Pablo Aguado - 2016
* */
#include <ros/ros.h>
#include <cv_bridge/cv_bridge.h> // OpenCV
#include <sensor_msgs/Image.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
/* La política de sincronización exacta NO FUNCIONA para los topics seleccionados, ya
* que la Kinect o sus drivers no los están publicando con la misma marca temporal.
* Ver más en http://wiki.ros.org/message_filters
*
* Exact sychronization policy IS NOT WORKING for the topics used, because the kinect
* is not publishing them with the same timestamp.
* See more in http://wiki.ros.org/message_filters */
//#define EXACT
#define APPROXIMATE
#ifdef EXACT
#include <message_filters/sync_policies/exact_time.h>
#endif
#ifdef APPROXIMATE
#include <message_filters/sync_policies/approximate_time.h>
#endif
using namespace std;
//using namespace sensor_msgs;
using namespace message_filters;
// Contador para la numeración de los archivos.
// Counter for filenames.
unsigned int cnt = 1;
// Handler / callback
void callback( const sensor_msgs::ImageConstPtr& msg_rgb , const sensor_msgs::ImageConstPtr& msg_depth )
{
ROS_INFO_STREAM(" callback
");
cv_bridge::CvImagePtr img_ptr_rgb;
cv_bridge::CvImagePtr img_ptr_depth;
try{
img_ptr_depth = cv_bridge::toCvCopy(*msg_depth, sensor_msgs::image_encodings::TYPE_16UC1);//TYPE_16UC1 TYPE_32FC1
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
try{
img_ptr_rgb = cv_bridge::toCvCopy(*msg_rgb, sensor_msgs::image_encodings::BGR8);//TYPE_8UC3 BGR8
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
ROS_INFO_STREAM(" convert ok!
");
cv::Mat& mat_depth = img_ptr_depth->image;
cv::Mat& mat_rgb = img_ptr_rgb->image;
char file_rgb[100];
char file_depth[100];
sprintf( file_rgb, "%04d_rgb.png", cnt );
sprintf( file_depth, "%04d_depth.png", cnt );
vector<int> png_parameters;
png_parameters.push_back( CV_IMWRITE_PNG_COMPRESSION );
/* We save with no compression for faster processing.
* Guardamos PNG sin compresión para menor retardo. */
png_parameters.push_back( 9 );
cv::imwrite( file_rgb , mat_rgb, png_parameters );
cv::imwrite( file_depth, mat_depth, png_parameters );
ROS_INFO_STREAM(cnt << "
");
ROS_INFO_STREAM("Ok!"
"Images saved
");
cnt++;
}
int main(int argc, char** argv)
{
// Initialize the ROS system and become a node.
ros::init(argc, argv, "guardar_imagenes");
ros::NodeHandle nh;
message_filters::Subscriber<sensor_msgs::Image> subscriber_depth( nh , "/camera/depth/image_raw" , 1 );
message_filters::Subscriber<sensor_msgs::Image> subscriber_rgb( nh , "/camera/rgb/image_raw" , 1 );
#ifdef EXACT
typedef sync_policies::ExactTime<sensor_msgs::Image, sensor_msgs::Image> MySyncPolicy;
#endif
#ifdef APPROXIMATE
typedef sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image> MySyncPolicy;
#endif
// ExactTime or ApproximateTime take a queue size as its constructor argument, hence MySyncPolicy(10)
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), subscriber_rgb, subscriber_depth );
sync.registerCallback(boost::bind(&callback, _1, _2));
while(ros::ok())
{
char c;
ROS_INFO_STREAM("
Ingrese 'a' para guardar un par de imágenes o 'b' para guardar 300 imágenes
"
"Enter 'a' to save a pair of images or 'b' to automatically save 300 images
");
cin.get(c);
cin.ignore();
c = tolower(c);
ROS_INFO_STREAM("You entered " << c << "
");
if( c == 'a' )
{
/* Le damos el control a la función callback cuando haya imágenes.
* We give control to the callback function.*/
ROS_INFO_STREAM("I am running!
");
ros::spin();
ROS_INFO_STREAM("I am OVER!
");
}
else if( c == 'b' )
{
unsigned int cnt_init = cnt;
while( cnt - cnt_init < 300 )
{
ros::spinOnce();
}
}
else break;
}
ROS_INFO_STREAM("Cerrando nodo
Closing node
");
return 0;
}
Images are saved wherever the node is ran.
For compiling, situate on the root of src (the node workspace) and run catkin_make in the console.
Then go to the devel folder that has just been created and run source setup.bash to inform ROS about the existence of that node.
Finally, rosrun guardar_imagenes guardar_imagenes
.
This should be run in the folder where you want to save the images and from the same terminal/console in which source setup.bash was executed.