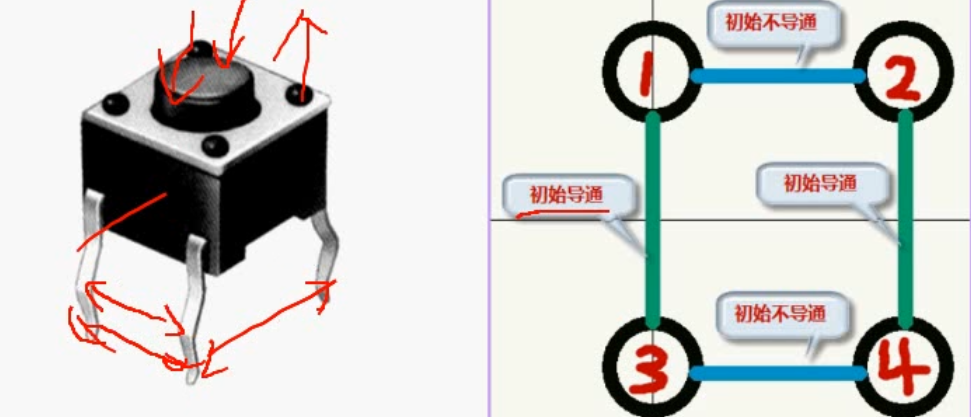
机械弹性开关,当按键按下时,1和2,3和4导通
低电平按下,高电平断开
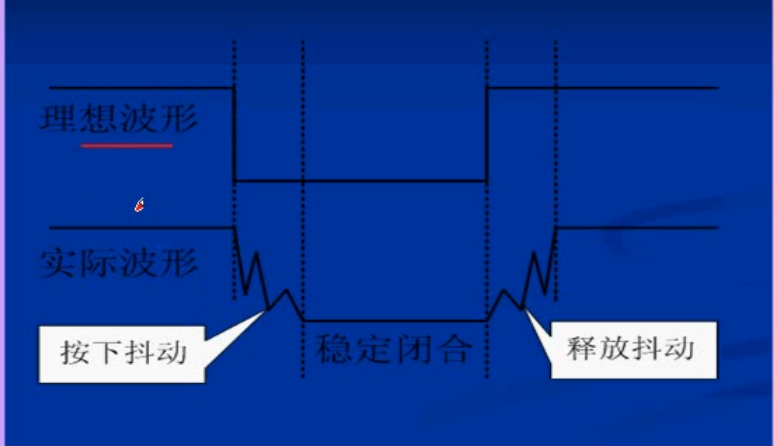
要消除抖动
5ms~10ms
硬件消除是RC
软件消除是if语句delay_ms();
按键按下,加下拉电阻,key_up,读到的是高电平,GPIO_Mode_IPD ,下拉,上升沿
k1,k2,k3,加上拉电阻,下降沿


key.c
#include "key.h"
#include "SysTick.h"
void KEY_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin=KEY_UP_Pin;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD; //下拉电阻
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(KEY_UP_Port,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=KEY_LEFT_Pin|KEY_DOWN_Pin|KEY_RIGHT_Pin;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉电阻
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(KEY_Port,&GPIO_InitStructure);
}
//mode=0--单次扫描
//mode=1--连续扫描
u8 KEY_Scan(u8 mode)//按键扫描
{
static u8 key=1;//静态变量
if(key==1&&(K_UP==1||K_LEFT==0||K_DOWN==0||K_RIGHT==0))//判断语句,有个按下,就为真
{
delay_ms(10);
key=0;
if(K_UP==1)//判断
{
return KEY_UP;
}
else if(K_LEFT==0)
{
return KEY_LEFT;
}
else if(K_DOWN==0)
{
return KEY_DOWN;
}
else
{
return KEY_RIGHT;
}
}
else if(K_UP==0&&K_LEFT==1&&K_DOWN==1&&K_RIGHT==1)//如果没有按下,&&与运算,都
{
key=1;
}
if(mode==1)
{
key=1;
}
return 0;
}
key.h
#ifndef _key_H
#define _key_H
#include "system.h"
#define KEY_UP_Pin GPIO_Pin_0
#define KEY_UP_Port GPIOA
#define KEY_LEFT_Pin GPIO_Pin_2
#define KEY_DOWN_Pin GPIO_Pin_3
#define KEY_RIGHT_Pin GPIO_Pin_4
#define KEY_Port GPIOE
#define K_UP PAin(0)//输入的电平检测,位带
#define K_LEFT PEin(2)
#define K_DOWN PEin(3)
#define K_RIGHT PEin(4)
//#define K_UP ReadInputDataBit(KEY_UP_Port,KEY_UP_Pin)//库函数
//#define K_LEFT ReadInputDataBit(KEY_Port,KEY_LEFT_Pin)
//#define K_DOWN ReadInputDataBit(KEY_Port,KEY_DOWN_Pin)
//#define K_RIGHT ReadInputDataBit(KEY_Port,KEY_RIGHT_Pin)
#define KEY_UP 1
#define KEY_LEFT 2
#define KEY_DOWN 3
#define KEY_RIGHT 4
void KEY_Init(void);
#endif
main.c
#include "system.h"
#include "led.h"
#include "SysTick.h"
#include "key.h"
int main()
{
u8 key,i=0;
SysTick_Init(72);
LED_Init();//初始化
KEY_Init();
while(1)
{
key=KEY_Scan(0);
switch(key)
{
case KEY_UP:led2=0;break;//亮
case KEY_LEFT:led2=1;break;//灭
case KEY_DOWN:led3=1;break;//灭
case KEY_RIGHT:led3=0;break;//亮
}
i++;
if(i%20==0)
{
led1=!led1;
}
delay_ms(10);
}
}
可通过按键对蜂鸣器进行操作