参考:https://github.com/Razor-AHRS/razor-9dof-ahrs/wiki/Tutorial#sensor-calibration
链接中使用的硬件是SparkFun“9DOF Razor IMU”,本文使用的是GY-951,同样适用。
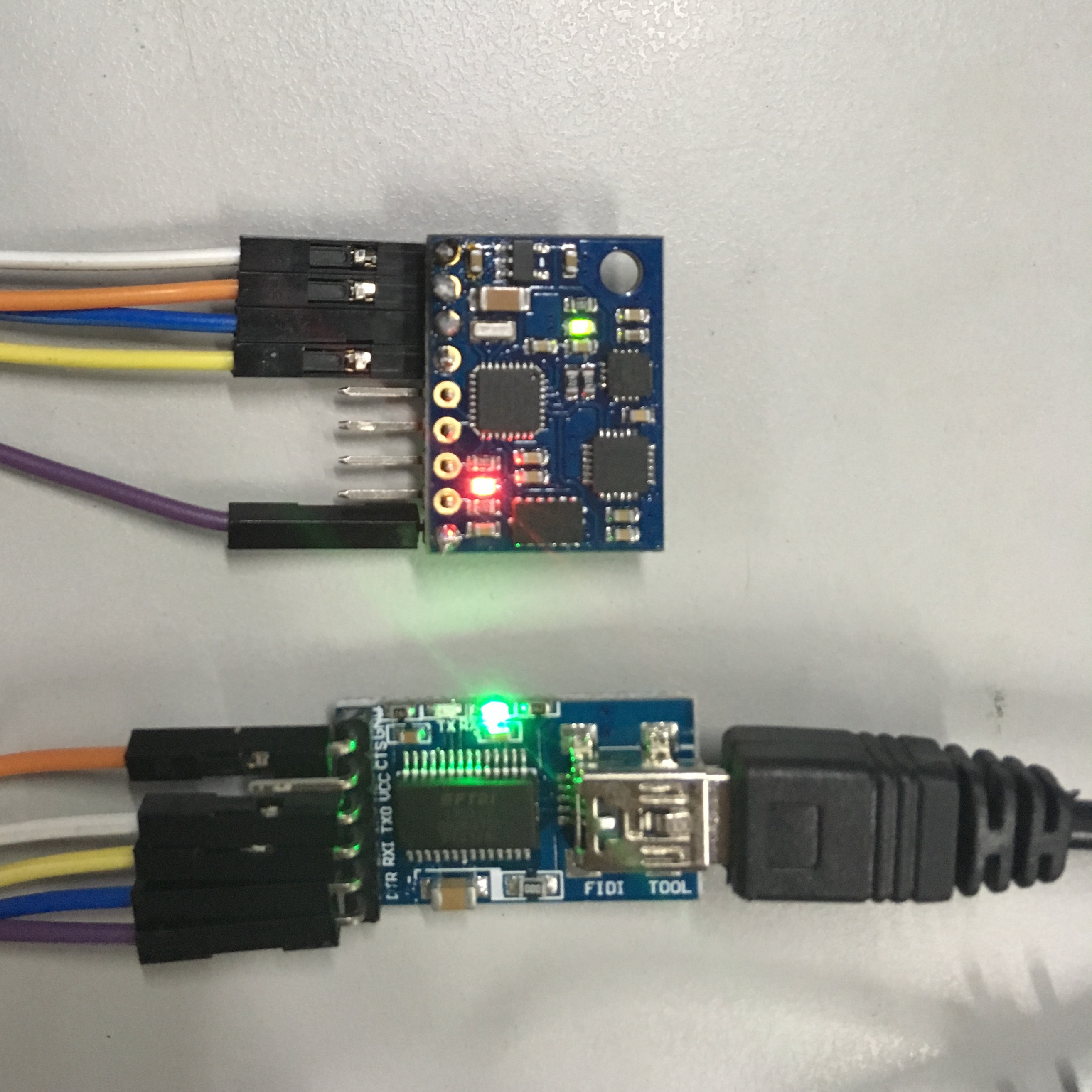
硬件连接方式:
GY-951模块 + Mini FT232RL(USB转串口模块)

设置软件:
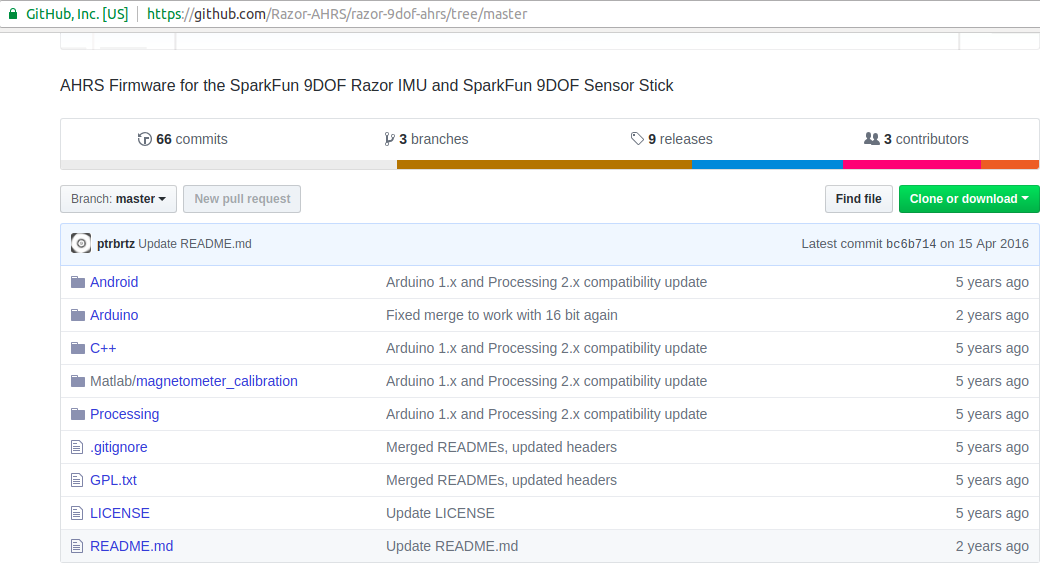
从https://github.com/Razor-AHRS/razor-9dof-ahrs/tree/master 中下载并解压Razor AHRS固件。
下载安装Arduino软件,解压后进入文件夹,打开终端输入 ./install.sh
- 从下载的Razor AHRS固件包中
Arduino/Razor_AHRS/Razor_AHRS.ino使用Arduino打开文件。 - 在Arduino中:
- 看看
Razor_AHRS.ino文件的顶部,它包含有关固件的有用信息。 - 此外还有一个部分标
"USER SETUP AREA"有你可以设置固件默认值的地方。- 你必须选择你正在使用的硬件
"HARDWARE OPTIONS"!(将#define HW__VERSION_CODE 10736 前注释去掉)
- 你必须选择你正在使用的硬件
- 转到
"Tools"→"Board"并选择"Arduino Pro or Pro Mini 处理器选(3.3v, 8mhz) w/ATmega328"。 - 转到
"Tools"→"Serial Port"并选择端口(/dev/ttyUSB0)。 - 去
"File"并击中"Upload to I/O Board"。在Arduino代码窗口底部的一小段时间之后"Done uploading"。
- 看看
- 打开Arduino的串行监视器,将波特率设置为57600。
若上传时出现权限错误
avrdude: ser_open(): can't open device "/dev/ttyUSB0": Permission denied
可在终端输入
sudo usermod -a -G dialout 用户名
sudo chmod a+rw /dev/ttyUSB0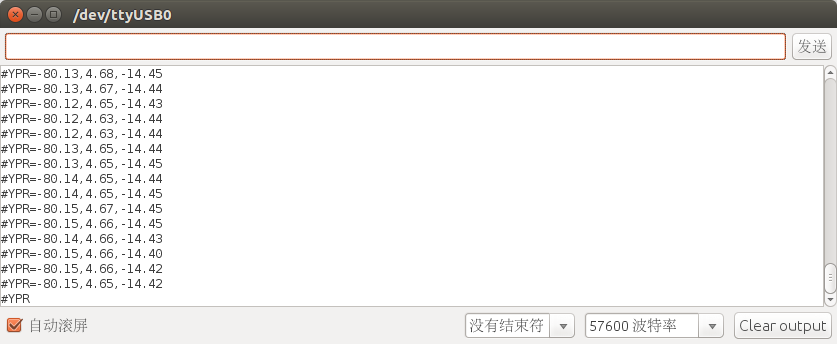
传感器校准
在校准前几分钟给芯片供电可能会很好,传感器可以预热。第一次校准传感器可能有点棘手,但我们先来看看:
-
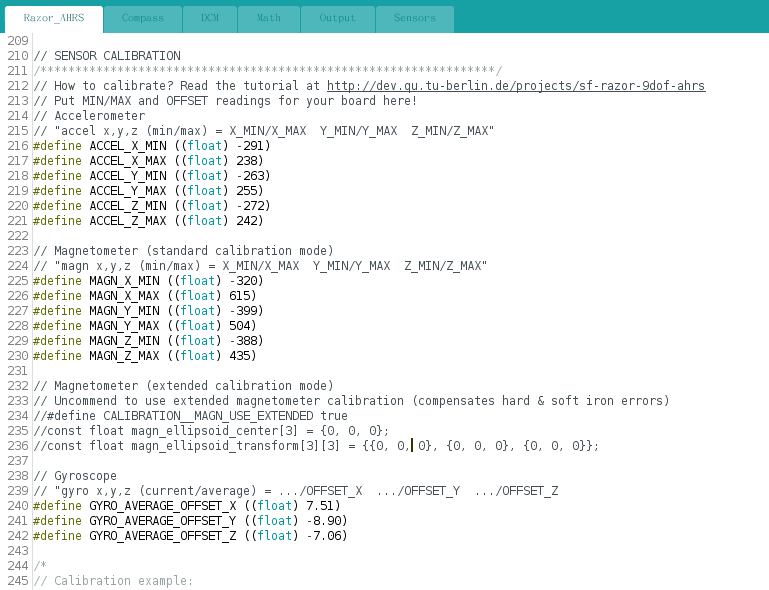
Arduino/Razor_AHRS/Razor_AHRS.ino使用Arduino打开并找到部分"USER SETUP AREA"/"SENSOR CALIBRATION"。这是您稍后放置校准值的地方。 -
将GY-951连接到您的计算机,在Arduino中设置正确的串行端口并打开串行监视器。
-
如果你没有更改固件默认值,你应该看到很多这样的输出:
#YPR=-155.73,-76.48,-129.51 -
通过发送字符串将固件输出模式设置为校准
#oc。你现在应该看到这样的输出:accel x,y,z (min/max) = -5.00/-1.00 25.00/29.00 225.00/232.00
- 校准加速度计:
- 我们将尝试在每个轴上找到地球引力的最小和最大输出值。当您移动电路板时,请将其缓慢移动,因此您应用的电路板的加速度越小越好。我们只想要纯粹的引力!
- 拿起电路板并用x轴垂直指向。当你这样做时,你可以看到x-maximum(第二个值)越来越大。
- 保持电路板静止不动,然后重新发送重置测量
#oc。 - 现在小心地将板沿各个方向稍微倾斜一点,直到数值不再变大为止并写下x最大值。
- 对另一侧(x轴向上)做同样的事情来获得x最小值:将其移到原位,发送
#oc重置测量值,找到x最小值并写下来。 - 对z轴(向上和向上)和y轴(向右和向左)做同样的事情。
- 如果您认为通过抖动或移动电路板使测量结果变得过于混乱,您可以随时通过发送进行重置
#oc。
- 如果您认为通过抖动或移动电路板使测量结果变得过于混乱,您可以随时通过发送进行重置
- 您现在应该具有所有最小值/最大值。把它们放进去
Razor_AHRS.ino。 (Razor_AHRS.ino的第245行开始的代码有详细校正方法) - 注意:这样做时你必须非常小心!即使用手指轻轻敲击电路板也会使测量变得困难,并导致错误的校准。
#oc经常使用并仔细检查您的最小/最大值)
- 校准磁力计:
-
这一次,可以尽可能多地摇动电路板,但是请远离有磁场的电子设备,以免干扰。
-
我们仍然是加速计的校准模式。发送
#on,将校准移动到下一个传感器,即磁力计。 -
注意: 本节仅供参考,但您应该使用较新的“扩展磁强计校准(详细请看参考链接),因为它可以产生更好的结果!您可以跳过该步骤并继续使用陀螺仪。
-
我们将尝试为每个轴上的地球磁场找到最小和最大输出值。这基本上像校准加速度计一样工作,除了地球的磁场没有直线下降。根据你目前星球上的哪个地方,它以一定的角度指向北半球(南半球)或北半球(北半球)。这个角度被称为倾斜度。此外,真实的地理北极可能会有微小的偏差,这就是所谓的赤纬。以下描述假定您正在校准北半球的磁力计。
-
将电路板像x轴一样放在指南针上(记住:x轴=向前,指向连接器孔)指向北方。然后开始围绕东西轴旋转棋盘,以便它开始朝下。观察串行监视器中的x最大值(第二个值),您会注意到当您将电路板的x轴与地球的磁场对齐时。停止旋转,然后再向各个方向稍微倾斜,直到数值不再变大。
-
为相反的方面做同样的事情来获得x最小值:第一个点向北,然后向下。
-
对于磁强计,我们不需要在两次
#oc测量之间进行重置。 -
对z轴(上/下)和y轴(左/右)做同样的事情。
- 注意:电路板围绕要测量的轴旋转并不重要,只是它指向正确的方向。例如,当您开始测量z轴时,x轴指向上或向下或向左或向右都无关紧要。
-
你现在应该在串口监视器中有这样的东西:
magn x,y,z (min/max) = -564.00/656.00 -585.00/635.00 -550.00/564.00将这些值放入
Razor_AHRS.ino。
-
- 校准陀螺仪:
-
仍然将电路板放在桌子上。
-
我们仍然是磁力计的校准模式。发送
#on,这会将校准移动到下一个传感器,即陀螺仪。 -
等待10秒钟,不要移动电路板。它将收集和平均所有三个轴上陀螺仪的噪音。
-
你现在应该有这样的输出:
gyro x,y,z (current/average) = -29.00/-27.98 102.00/100.51 -5.00/-5.85- 如果您认为您通过晃动或移动电路板搞乱了测量,则可以通过发送进行重置
#oc。
- 如果您认为您通过晃动或移动电路板搞乱了测量,则可以通过发送进行重置
-
取每一对的第二个值并将其放入
Razor_AHRS.ino。
-
- 完成:)
Linux C++ Interface
https://github.com/Razor-AHRS/razor-9dof-ahrs/tree/master/C%2B%2B
进入C++文件中
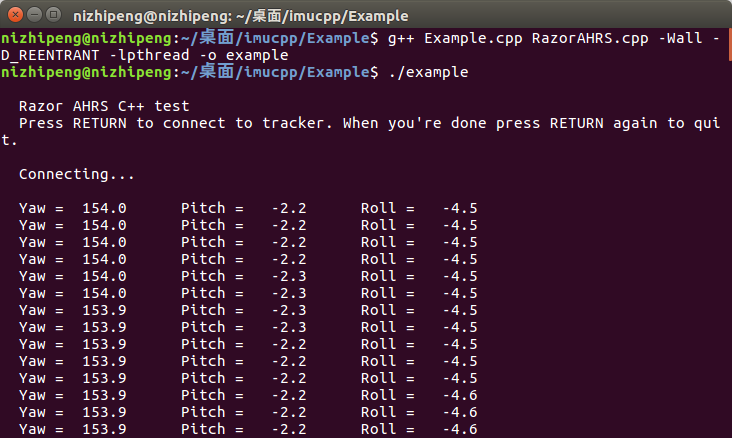
编译测试程序:
g++ Example.cpp RazorAHRS.cpp -Wall -D_REENTRANT -lpthread -o example
执行:./example
若出现报错:Did you set your serial port in Example.cpp?
先在Example.cpp中将串口名改为 “/dev/ttyUSB0”
再在终端输入:
sudo usermod -a -G dialout 用户名
sudo chmod a+rw /dev/ttyUSB0
(https://vps123.info/ubuntu-arduino-ide-err-open-device-permission-denied/)
参考:https://www.cnblogs.com/21207-iHome/p/7832355.html
进一步工作:该部分可以读取加速度计,陀螺仪,磁力计的数据,所以为了更形象的显示IMU姿态,可以下载rviz_imu_plugin插件(http://wiki.ros.org/rviz_imu_plugin),话题为(http://docs.ros.org/api/sensor_msgs/html/msg/Imu.html)
也可参考:http://www.corvin.cn/428.html
欢迎交流。