卷积神经网络基础
feature map 大小计算
对于 Conv1d,Pytorch 的文档给出了如下的公式 1,对于二维和三维的情况是通用的。
feature map 的大小由四个参数决定,分别是 kernel_size,padding,stride,dilation。下面逐个加上进行分析。
kernel_size
假设输入长度是 5,卷积核为 3,那么输出是 3。输入和输出的公式如下。
padding
现在在原来的基础上加上 padding,假设在两边加 padding,其实就相当于增大输入的长度。
stride
在上面的基础,再加上步长。默认的步长是 1,如果将步长变为 2,那么相当于直接减半。步长变为 3,那么除 3。举个例子,长度为 9,没有 padding,卷积核大小为 2。步长为 1,输出为 8。步长为 2,输出为 4,舍掉一个多余的输入。步长为 3,输出为 3。步长为 4,输出为 2,同样舍掉一个多余的输入。
dilation
kernel 的元素之间的距离。默认是 1。假设卷积核大小为 3,dilation 为 2 时,卷积核大小会变成 5,dilation 为 3 时,卷积核大小会变成 7。假设卷积核大小为 5,dilation 为 2 时,卷积核大小会变成 9,dilation 为 3 时,会变成 (3 * 4) + 1 = 13。至此可以发现规律,卷积核原大小为 k,dilation 为 d,那么有 d * (k - 1) + 1,代入公式 4。
参数大小计算
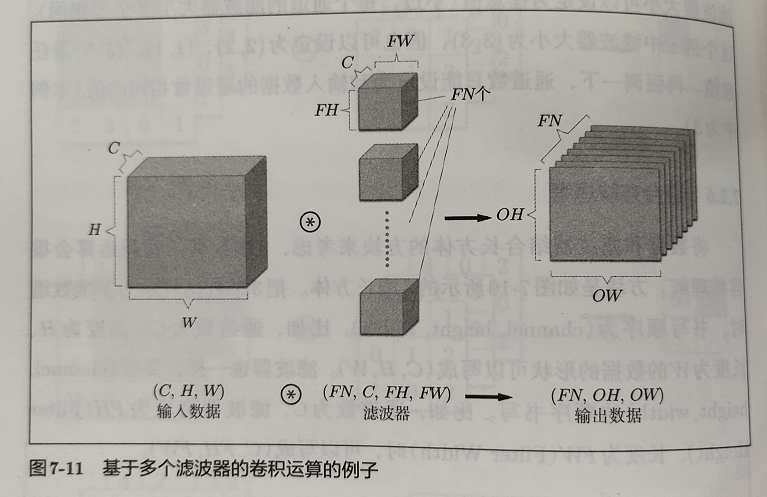
《深度学习入门》一书中有如下卷积例子,对于一个 C 个通道,高度 H,宽度 W 的图片,经过滤波器,可以得到一个 (1, OH, OW) 的特征图。每个通道都有一个卷积核,C 个通道就有 C 个卷积核。所以卷积层的参数和通道数量成正比。

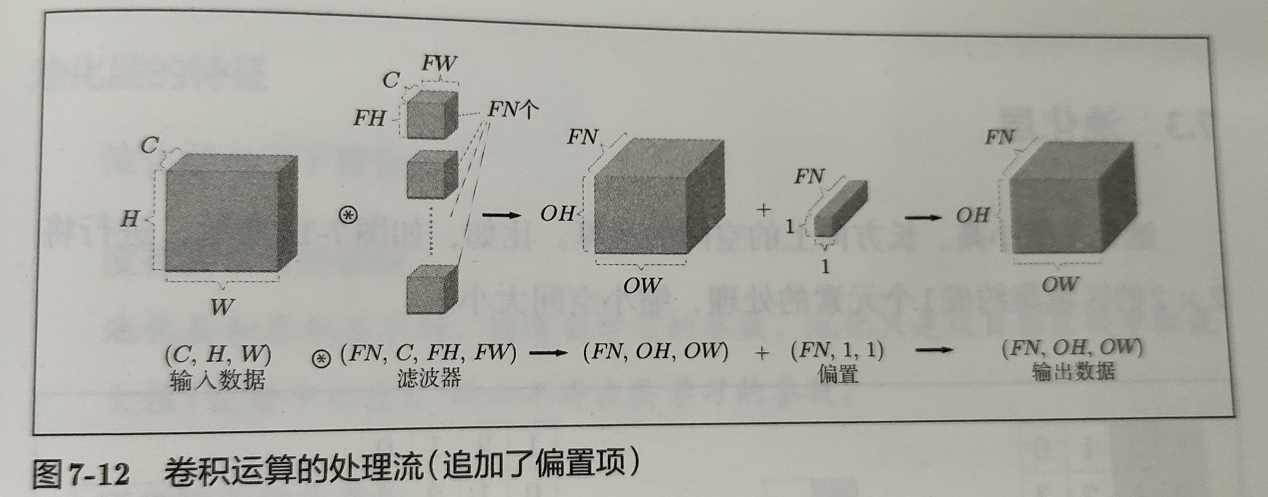
一般实现中,会有一个参数 out_channels,这个参数用于控制输出多少个通道。一个输出通道,需要一个不同的卷积核。所以参数量也和输出通道数量成正比。
此外,卷积层一般还会有偏置量。每个输出通道一个偏置量。
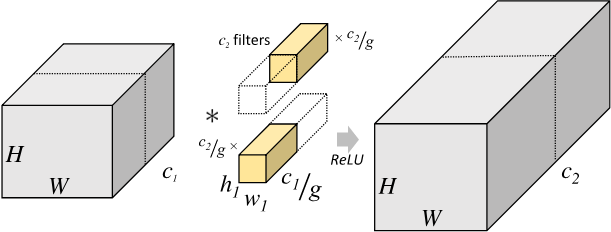
Pytorch 的文档还有一个 groups 参数,默认是 1。如果不是 1,那么需要进行分组卷积[2]。怎么分组呢?将输入和输出都分成 g 组,输入和输出的每一组对应上,然后算卷积核参数。输入和输出通道都要除以分组数,总的参数量还要乘以分组数。这么一分析,除两次,乘一次,参数量减少了 $frac{1}{g} $ !

小结
参数量首先由卷积核决定,接着参数量和输入通道、输出通道都成正比,卷积层的偏置量参数和输出通道成正比。如果分组,那么参数量还要除以分组数量。
im2col
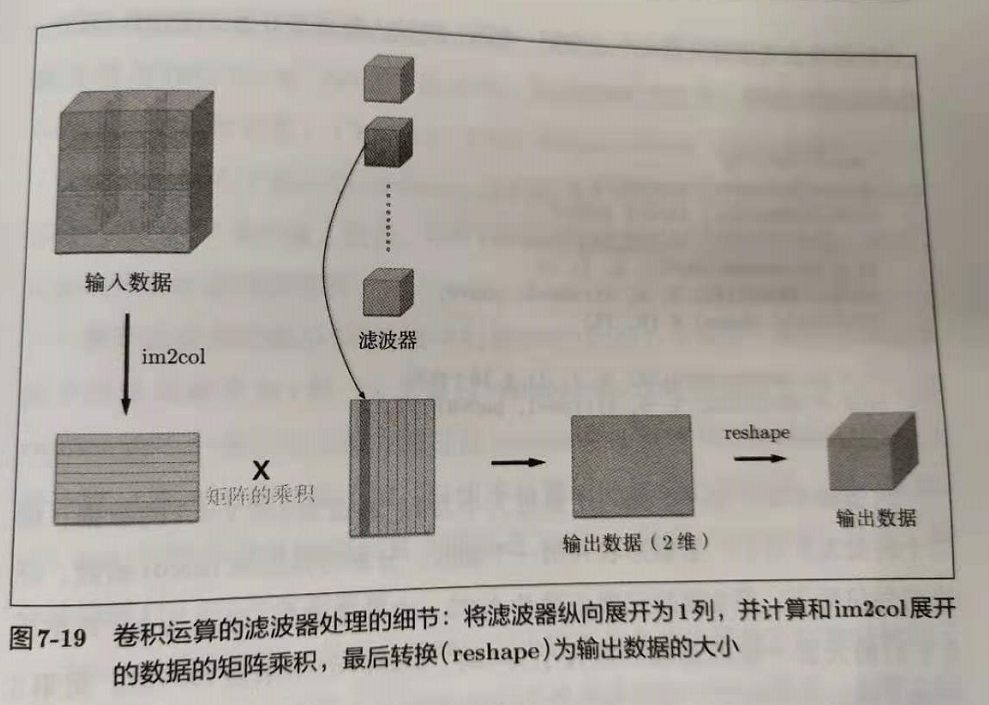
如果按照卷积的算法去老老实实计算,速度不会太快。一般使用 im2col 进行加速,用空间换时间,然后使用矩阵乘法来完成计算。将图片按照滤波器的应用区域依次展开成一行,卷积核展开成一列,接着就可以用矩阵乘法来进行卷积了。
im2col 的输入是一个四维数据 (N, C, H, W),输出是一个二维数组 ()。
实现
知乎上的一篇文章,将这个过程理了理,从一张图一个通道一个卷积核,逐步推理到多张图多个通道多个卷积,最后提供了一个实现。
核心是下面这一句代码:
col[y_start+x::outsize, :] = img[:, y_min:y_max, x_min:x_max, :].reshape(N, -1)
应该如何理解呢?
- 最终 col 是什么样子的?每个图片上,每个卷积到的局部区域,展开成向量,然后叠起来。一个图片有 N 行,那么加上 batch 就有 N * batch 那么多行。
- img 是 NHWC,C 放最后,
img[:, y_min:y_max, x_min:x_max, :]的结果是用卷积核圈出每个图片的局部构成的向量。注意这里取出来每个图片构成的局部向量,所以要分散放,设置步长为 outsize,然后分散放上去。
参考链接
[1] https://pytorch.org/docs/stable/generated/torch.nn.Conv1d.html
[2] https://zhuanlan.zhihu.com/p/65377955