20145324 20145325 《信息安全系统设计基础》实验四 外设驱动程序设计
实验封面
课程:信息安全系统设计基础 班级: 1453
姓名:王嘉澜 张梓靖 学号:20145324 20145325
成绩: 指导教师:娄嘉鹏 实验日期:2016.11.17
实验密级: 预习程度: 实验时间:10:10-12:30
仪器组次: 必修/选修:必修 实验序号:4
实验名称: 外设驱动程序设计
实验目的与要求:
1.正确连接ARM ,设置好环境
2.理解驱动程序的一般设计方法
| 实验仪器名称 | 数量 | 型号 |
|---|---|---|
| pc机 | 1 | XP |
| arm机 | 1 | UP-TECH |
| 虚拟机 | 1 | REDHAT |
实验过程
-
按实验一的环境配置方法将环境配置好
-
通过文件共享,将要测试的代码共享到虚拟机里
-
修改 makefile 为
-
在/usr/src 下建立一个 linux 连接

-
建立设备节点
-
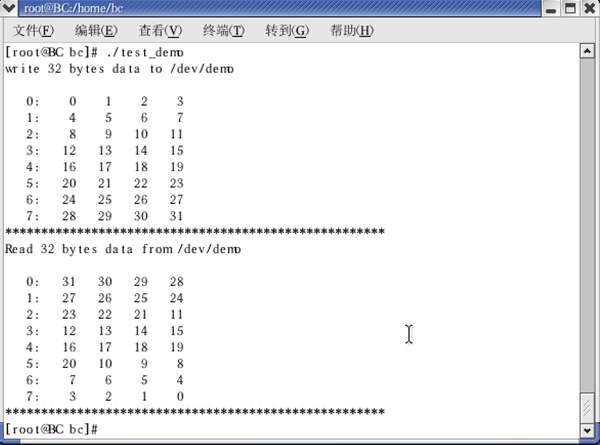
运行程序进行测试
实验代码分析
- 完整代码(demo.c)
#ifndef __KERNEL__
# define __KERNEL__
#endif
#ifndef MODULE
# define MODULE
#endif
#include <linux/config.h>
#include <linux/module.h>
#include <linux/devfs_fs_kernel.h>
#include <linux/init.h>
#include <linux/kernel.h> /* printk() */
#include <linux/slab.h> /* kmalloc() */
#include <linux/fs.h> /* everything... */
#include <linux/errno.h> /* error codes */
#include <linux/types.h> /* size_t */
#include <linux/proc_fs.h>
#include <linux/fcntl.h> /* O_ACCMODE */
#include <linux/poll.h> /* COPY_TO_USER */
#include <asm/system.h> /* cli(), *_flags */
#define DEVICE_NAME "demo"
#define demo_MAJOR 254
#define demo_MINOR 0
static int MAX_BUF_LEN=1024;
static char drv_buf[1024];
static int WRI_LENGTH=0;
/*********************************************************************/
/*逆序排列缓冲区数据*/
static void do_write()
{
int i;
int len = WRI_LENGTH;
char tmp;
for(i = 0; i < (len>>1); i++,len--){
tmp = drv_buf[len-1];
drv_buf[len-1] = drv_buf[i];
drv_buf[i] = tmp;
}
}
/*********************************************************************/
static ssize_t demo_write(struct file *filp,const char *buffer, size_t count) //完成驱动的写接口
{
if(count > MAX_BUF_LEN)count = MAX_BUF_LEN;
copy_from_user(drv_buf , buffer, count);
WRI_LENGTH = count;
printk("user write data to driver
");
do_write();
return count;
}
/*********************************************************************/
static ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos) //完成驱动的读接口
{
if(count > MAX_BUF_LEN)
count=MAX_BUF_LEN;
copy_to_user(buffer, drv_buf,count);
printk("user read data from driver
");
return count;
}
/*********************************************************************/
static int demo_ioctl(struct inode *inode, struct file *file, //演示ioctl调用接口的实现过程
unsigned int cmd, unsigned long arg)
{
switch(cmd){
case 1:printk("runing command 1
");break;
case 2:printk("runing command 2
");break;
default:
printk("error cmd number
");break;
}
return 0;
}
/*********************************************************************/
static int demo_open(struct inode *inode, struct file *file) //打开设备
{
sprintf(drv_buf,"device open sucess!
");
printk("device open sucess!
");
return 0;
}
/*********************************************************************/
static int demo_release(struct inode *inode, struct file *filp) //关闭设备
{
MOD_DEC_USE_COUNT;
printk("device release
");
return 0;
}
/*********************************************************************/
static struct file_operations demo_fops = { //设置file_operations结构
owner: THIS_MODULE,
write:demo_write,
read: demo_read,
ioctl: demo_ioctl,
open: demo_open,
release: demo_release,
};
/*********************************************************************/
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_demo_dir, devfs_demoraw;
#endif
/*********************************************************************/
static int __init demo_init(void) //初始化
{
#ifdef CONFIG_DEVFS_FS
devfs_demo_dir = devfs_mk_dir(NULL, "demo", NULL);
devfs_demoraw = devfs_register(devfs_demo_dir, "0", DEVFS_FL_DEFAULT,
demo_MAJOR, demo_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,
&demo_fops, NULL);
#else
int result;
SET_MODULE_OWNER(&demo_fops);
result = register_chrdev(demo_MAJOR, "scullc", &demo_fops);
if (result < 0) return result;
// if (demo_MAJOR == 0) demo_MAJOR = result; /* dynamic */
#endif
printk(DEVICE_NAME " initialized
");
return 0;
}
/*********************************************************************/
static void __exit demo_exit(void)
{
unregister_chrdev(demo_MAJOR, "demo");
//kfree(demo_devices);
printk(DEVICE_NAME " unloaded
");
}
/*********************************************************************/
module_init(demo_init);
module_exit(demo_exit);
- 除了 demo_read 、demo_write 、do_write 函数,添加一个小任务函数 do_read,该函数作用是将从设备中读取到的数据进行数据逆序排列,再通过读取函数读取转换后的数据:
- 添加的do_read()函数:
static void do_read()
{
int i;
int len = WRI_LENGTH_R;
char tmp;
for(i = 0; i < (len>>1); i++,len--){
tmp = buffer[len-1];
buffer[len-1] = buffer[i];
buffer[i] = tmp;
}
}
- 相应的对demo_read函数的修改:
static int WRI_LENGTH_R=0;
static ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
{
if(count > MAX_BUF_LEN)
count=MAX_BUF_LEN;
copy_to_user(buffer, drv_buf,count);
WRI_LENGTH_R = count;
printk("user read data from driver
");
do_read();
return count;
}
实验问题及解决
- make不成功
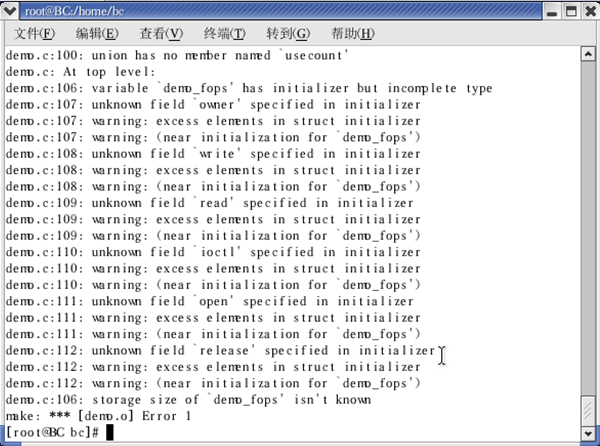
- 发现没有插入驱动模块 demo.o
- 运行程序不成功

- 还没有建立设备节点。建立以后就可以正常运行了
实验体会
makkefile中需要修改的地方的含义:KERNELDIR表示内核源代码路径,INCLUDEDIR表示配置文件,#CROSS_COMPILE表示编译适合编译的主机运行的二进制文件。通过这次实验,我们知道了在运行外设驱动程序时,要插入驱动模块 demo.o,要在/usr/src 下建立一个 linux 连接,如果是使用交叉编译器,不需要建立设备节点等等。