选择电机类型和型号时,设计师要考虑三个首要的因素
1.电机的最小和最大转速(还有加速度);
2.电机可以提供的最大扭矩,以及扭矩和速度曲线的关系;
3.电机操作(不用传感器和闭环控制时)的精确性和重复性;
dc电机(有刷)
无刷直流电机(BLDC) PID(比例-积分-微分)校正算法
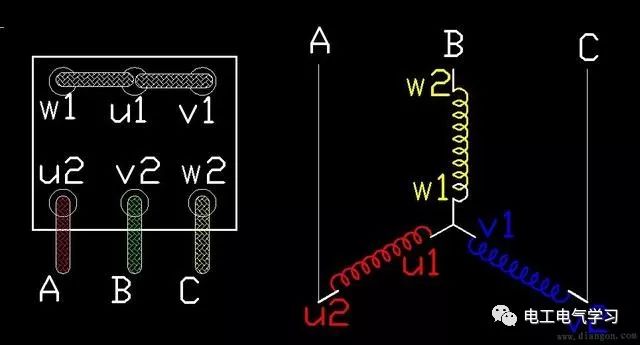
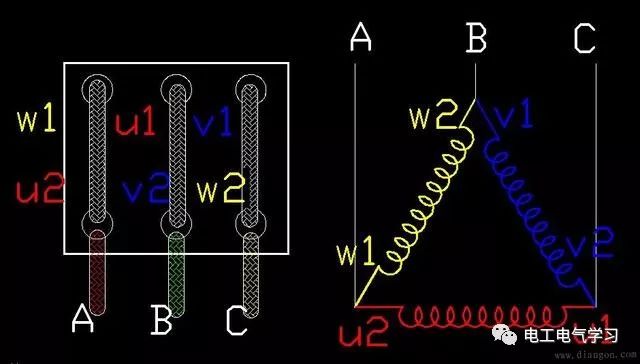
电机的接线方法无外乎以下两种:
星形接法(实物图)

星形接法(原理图)
三角形接法(实物图)

三角形接法(原理图)
星形和三角形接法在电压上和电流上的区别
三角形接法时电机相电压等于线电压;线电流等于根号3倍的相电流。
星形接时,线电压是相电压的根号3倍,而线电流等于相电流。
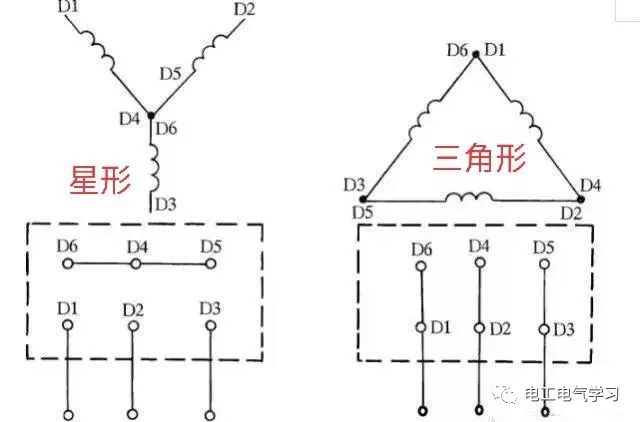
其实,就是这么简单,第一,记住电机接线端的样子,一横为⭐,三竖为△。
============================================
单速电机3个绕组,双速电机6个绕组,
单速电阻1,2,3 测完,计算平衡度;双速的1/2/3 比较, 4/5/6再比较; 另外还有热保护器的4个电阻
匝间也是1/2/3 比较, 4/5/6再比较
转向也是要测2个转向(1/2/3是正转/反转? 4/5/6是正转/反转? )
耐压 要测对地耐压, 相间1,相间2,相间3,另外还有个热保护器的耐压
(耐压包括漏电流和绝缘电阻) 耐压试验的专业术语为介电强度试验(以下简称耐压试验),是电机产品的一个重要检查项目
被测试电机外壳(或铁心)以及未加高压的绕组都应可靠接地。
● 试验加压时间分为1min和1s两种;对于电机成品按1min方法耐压试验,电压值按GB755具体的规定值。 1s的方法仅限于批量生产的额定功率≤200kW,额定电压UN≤lkV的电机;采用该方法试验时,试验电压要高于lmin方法规定值的20%,即1min试验方法施压值的1.2倍。
华仪耐压仪测耐压时,测试时间要设为1.5秒,否则还没来得及读数
热保护器是两片不同的合金组合在一起,通过电流后会发热,由于两种不同的合金热膨胀系数不同,合金势必向一个方向弯曲,触电离开,就断了电。弯曲速度与通过的电流大小成正比。这样就保护了用电设备。 但电机容量较大时,需与电流监测型配合使用,避免电机堵转时温度急剧上升时,由于测温元件的滞后性,导致电机绕组受损
=======================================
同开环控制系统相比,闭环控制具有一系列优点。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
原理和特点
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它 以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的 其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或 不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、 积分、微分计算出控制量进行控制的。
比例(P)控制
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的 或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积 分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到接近于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后几乎无稳 态误差。
微分(D)控制
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用, 其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能 够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在 调节过程中的动态特性。

怎样判断无刷电机PCB 板上霍尔元件的好坏
用表直流20V档分别测量三相霍尔元件输出信号Ua、Ub、Uc 。正常时,Ua=Ub=Uc=1/2UH≈2.5V(UH霍尔元件的电源电压)。若任一相输出信号电压近于0V或5V,则其相应的霍尔元件已坏。
-----------------------------------
振动加速度和分贝的转换公式(????这个是经验公式??? 适用性)
A: m/s^2
B: dB
B=20*log(A/0.000316)
A=10^(B/20)*0.000316
-----------------------------------
电机转速RPM和分贝有公式吗? 好像没直接关系.
例如这个电脑风扇
他们使用了猫头鹰的Noctua NA-FC1控制器来调节风扇转速,对比了1000RPM转速(部分风扇转速要低于1000RPM)以及100%最高转速下的结果,测试风扇噪音的距离是20厘米,环境噪音是25分贝。
有一点要注意,原文里送测的有三个型号的A12风扇,表格里只写了NF-A12,猫头鹰A12系列三把风扇中有两把风扇转速可达2000RPM,NF-A12 ULN则是1200RPM。

1000RPM转速下的噪音
1000RPM转速是原文认为的噪音与风量兼顾的设定,这里的测试中猫头鹰NF-A12风扇在1000RPM转速下噪音只有26.1分贝,在他们测试的风扇中噪音是最低的,甚至比此前已经让人印象深刻的海盗船ML120 RGB风扇还要低1.4分贝。

最高2000RPM转速下的噪音值
如果是100%最高转速,2020RPM转速的NF-A12噪音也只有34.1分贝,比1530RPM转速的海盗船LL120 RGB风扇噪音低了3分贝。
如果只看2000RPM转速级别的,那么NF-A12风扇要比其他同级风扇的噪音低7-11分贝左右。
再看这个汽车的转速和分贝的关系
时速80时的转速是1650rpm,时速120km/h时转速是2400rpm。时速破百之后,胎噪和风噪增大较显著。
--------------------------------------------------------
反电动势
马达,继电器一类电感线圈需要并联一个反向续流二极管,防止电感产生的反向电动势损坏线圈。
通电时,电能转化为磁能,电磁铁产生恒定的磁场,继电器动作。
断电时,电能不再供应,电磁铁线圈失电,电流迅速下降,磁场失去能量来源,磁场逐渐消失,此时磁场由恒定状态变为变化状态。
当磁场变化时,附近的导体会产生感应电动势,其方向符合法拉第定律和楞次定律,与原先加在线圈两端的电压正好相反。这个电压就是反电动势。
反电动势的方向与电机的电流方向相反

通电时,电能转化为磁能,断电时,贮存的磁能转化为电能。
问题是,既然能量守恒,那么这些能量最终到哪里去了呢?这就是能量释放问题,也正是这个问题,造成了反电动势的危害。
继电器一般用开关或晶体管来控制。对于开关来说,在断电瞬间,反电动势会在开关的触点之间产生电火花,造成触点烧蚀。对于晶体管来说,反电动势会导致其击穿损坏。
克服反电动势最简单有效的方法,是在线圈两端反向并联一支二极管(二极管与线圈并联),当产生反电动势时,电流通过二极管释放,从而保护控制元件。
采用上述方法以后,磁能转化为电能,电能又全部转化为热能散发掉了。
接地电阻一般不得大于多少欧姆
1、独立的防雷保护接地电阻应小于等于10欧;
2、独立的安全保护接地电阻应小于等于4欧;
3、独立的交流工作接地电阻应小于等于4欧;
4、独立的直流工作接地电阻应小于等于4欧;
5、防静电接地电阻一般要求小于等于100欧。
6、 共用接地体(联合接地)应不大于接地电阻1欧
高速直流无刷电机组成部分为:定子、转子、霍尔板、前后端盖
洗衣机中的霍尔传感器
霍尔传感器,也称为转子位置传感器(RPS),是洗衣机自动化系统的一部分。它有助于控制板确保一切正常运行。基本上,霍尔传感器会密切关注洗衣机的电机,以确保它在洗涤过程中正确且正确地工作。
- 霍尔传感器位于何处
霍尔传感器安装在电机背面的定子上。在大多数情况下,您可以通过拔下垫圈并取下机器的后面板来接触定子,以露出电机。然后,您可以松开电机后部的中心螺栓以拆下转子。你会看到定子,一个大的环形元件,周围有几个铜线圈。您可以拧下定子,抬起组件,然后拔下通向霍尔传感器的电气连接器。根据您的特定品牌,传感器可以是一个小的塑料矩形单元,中间有三个方孔,安装在两个或多个定子线圈上。
- 霍尔传感器在工作
当洗衣机中的滚筒通过电机内部的转子旋转时,霍尔传感器 - 安装在电机内部转子旁边的定子上 - 保持静止位置。霍尔装置内部的电路可以检测转子的位置和速度,并将此信息发送到洗衣机的电子控制板。电子控制板使用此信息来决定洗涤过程并验证某些组件是否正常工作。
- 当霍尔传感器无法通信时
电子控制板根据霍尔传感器发送的信息做出关于洗涤周期的决定。例如,如果传感器未能告诉电子控制板电机正在旋转,电子控制板会停止洗衣机。霍尔传感器可能突然无法通信的原因可能会有所不同,例如,电机发生故障; 传感器本身失效; 电气连接松动; 或电线断裂。
直流无刷电机需要位置传感器来测量转子的位置,电机控制器通过接受位置传感器信号来让逆变器换相与转子同步来驱动电机持续运转。
尽管直流无刷电机也可以通过定子绕组产生的反电动势来检测转子的位置,而省去位置传感器,但是电机启动时,转速太小,反电动势信号太小而无法检测
市场上洗衣机主要分双缸洗衣机、波轮洗衣机和滚筒洗衣机三类,洗衣机主要有洗涤和脱水两种工作模式,配套的电机。
双缸洗衣机装配电机为感应电机包含洗涤电机和脱水电机;波轮洗衣机装配电机包含洗脱电机分感应电机和DD电机;滚筒洗衣机装配电机包含串激电机、DD电机、BPM电机三类。DD电机和BPM电机均属于直流无刷类型,无刷电机具有噪音低、效率高、工作时震动小等优点,市场占比正快速扩大。
洗衣机感应电机属于单相交流异步单速电机、三根引出线:主相、副相、公共端,电容启动,由定子、铸铝转子组成。
洗衣机串激电机:全称单相串励调速电机,属于交流有刷电机,两根输入电源线,由定子、电枢转子组成,电枢换向片32片。
洗衣机DD电机:direct drive 的英文首字母简写,直流无刷直接驱动电机,永磁外转子,磁瓦粘在转子上,转子与洗筒相连,配霍尔板,整套系统包含控制器、驱动器和电机,电机由定子和永磁外转子组成。
洗衣机BPM电机:Brushless Permanent Magnet Motor的英文首字母简写,直流无刷电机,永磁内转子,磁片嵌在转子上,电机通过皮带轮与洗筒相连,整套系统包含控制器、驱动器和电机,电机由定子和永磁内转子组成。洗衣机电机的测试对应的分感应电机测试、串激电机测试、无刷电机测试三大类,每类分定子测试、(铸铝/永磁)转子测试,整机(加载)测试,由于这三类电机的结构和工作原理完全不同,测试也差异较大