先说我对找凸包上的点时的理解:
P,A,B三个点,通过叉乘可以得知P,A,B的位置关系
AB × AP = |AB| * |AP| * sin∠PAB.
方向是A到B,A到P。
如果>0,那就是P在线AB左边,<0就是在右边,=0就是在线上。
为什么可以这样判断呢,AB × AP = |AB| * |AP| * sin∠PAB P在AB的左边,则∠PAB在0°到180°之间 sin∠PAB > 0 P在AB右边时,则∠PAB在-180°到0°之间 sin∠PAB < 0 因此,我们只要用AB和AP的叉积的正负,就可以判断P和AB的相对位置(AP相对AB是顺时针还是逆时针旋转)。 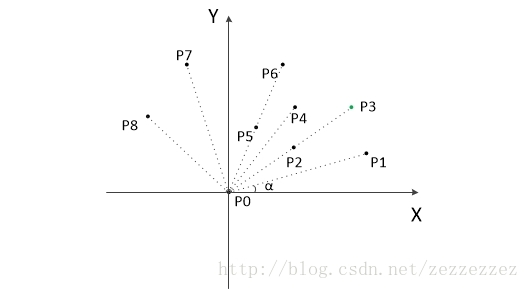
这里我想说一下我的理解吧。
为什么说一个点在线的左边就是凸包上的点呢,这个要先规定线的方向,当方向确定才能去说左边,右边。因为p0是最下边的点,通过极角排序后,咱们从X正半轴向上扫,注意叉乘公式,这个公式给了点之间的方向。所以这时候都是以左边称。一个三角形,只有一个点在所有边的左边才能定这个点在凸包内。那出现一个右边的点那就不行。举例来说有很多点,p0,p1,p2,p3….
当你知道了p0,p1是凸包上的点,通过计算发现p2在线p0p1的左边,此时线p0p1的右边是没有点的,当你手绘凸包时,线p0p1右边没有了点,那么当前知道的它左边的点就是凸包上的点,我管这个点叫凸包待定点,因为目前只计算了p2,通过计算p2的下一个点p3可以验证p2到底是不是凸包确定点。
总结:就是先逆时针排序,选取最下最左的点为第一个点,然后按顺序取点,左拐就放入,继续走,右拐则就要回退,一直退到左拐为止。
#define N 10005
int n,tot;//n为二维平面上点的个数,tot为凸包上点的个数
struct node {
int x,y;
}a[N],p[N]; //p[]用来储存凸包
double dis(node a1,node b1){ //两点间距离公式
return (a1.x-b1.x)*(a1.x-b1.x)+(a1.y-b1.y)*(a1.y-b1.y);
}
//叉积:返回结果为正说明p2在向量p0p1的左边(三点构成逆时针方向);
//为负则相反;为0则三点共线(叉积的性质很重要)
double multi(node p0,node p1,node p2){ //
return (p1.x-p0.x)*(p2.y-p0.y)-(p2.x-p0.x)*(p1.y-p0.y);
}
//极角排序:极角排序是根据坐标系内每一个点与x轴所成的角,逆时针比较。按照角度从小到大的方式排序
int cmp(node p1,node p2){ //极角排序;
int x=multi(p1,p2,a[0]);
if(x>0||(x==0&&dis(p1,a[0])<dis(p2,a[0])))
return 1;
return 0;
}
void Graham(){ //求凸包
int k=0;
for(int i=0;i<n;i++) //找到最下最左的一个点
if(a[i].y<a[k].y||(a[i].y==a[k].y&&a[i].x<a[k].x))
k=i;
swap(a[0],a[k]); //将其设置为第一个点
sort(a+1,a+n,cmp);
tot=2,p[0]=a[0],p[1]=a[1]; //p[]模拟栈,用来储存凸包
for(int i=2;i<n;i++){
while(tot>1&&multi(p[tot-1],p[tot-2],a[i])>=0)
tot--; //右拐就回退
p[tot++]=a[i]; //左拐就放入
}
}
double getArea(){
struct node b[3];
b[0] = p[0], b[1] = p[1], b[2] = p[2];
double area = 0;
for(int i = 2; i < tot; i++){
area += multi(b[0], b[1], p[i]) / 2.0;
b[1] = p[i];
}
return area;
}