ORB_SLAM2源码:
获得旋转矩阵,来自这里:http://www.cnblogs.com/shang-slam/p/6406584.html
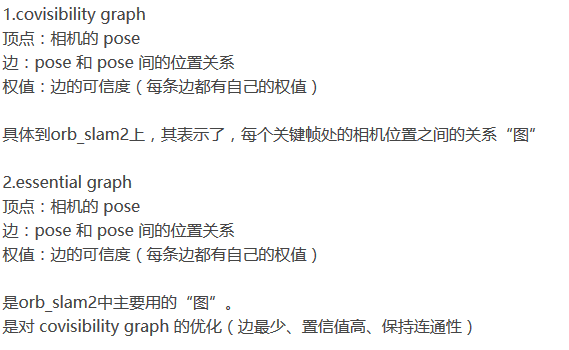
关于Covisibility图来自:http://blog.csdn.net/zhaojun1204/article/details/53002752
1、Covisibility Graph是一个无向有权图(graph),这个概念最早来自2010的文章[Closing Loops Without Places]。简单来说,每个node就是关键帧,edge的权重就是两个关键帧找到足够多的相同的 3d 点的数目。
2、为了在优化阶段减小计算量,作者提出了Essential Graph的概念,这个能够连接所有的node,但是edge会减少很多。可以认为是Covisibity Graph的最小生成树(MST)。
另有:http://blog.csdn.net/u014488388/article/details/65446731
直接法和特征点法,来自知乎:

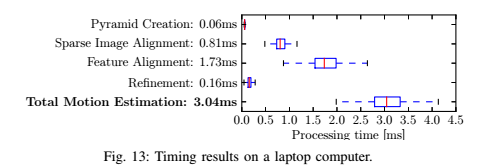
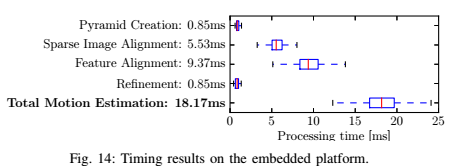
SVO论文中嵌入式平台和PC运行时间的比较,嵌入式平台ARM A9,4核1.6G;PC平台酷睿i7,8核1.6G,但作者指出这俩都只用两个CPU:
作者指出,作图线程的运行时间取决于深度滤波器的个数,有新关键帧插入时,滤波器个数很多,但随着滤波器的converge会显著下降。总的来说,作图线程比位姿估计线程耗时短得多,因此不重要。
高翔直接法笔记:
视频:http://www.bilibili.com/video/av6299156/
课件:http://www.rosclub.cn/post-231.html
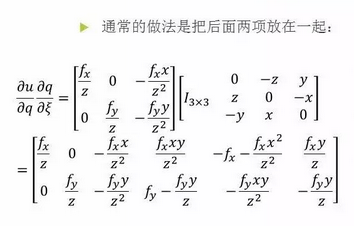
这个雅克比矩阵表示一个像素对李代数的变化量,刻画对相机做一个微小的扰动,p在相机第二个图里的的投影点是如何变化的。
SLAM常用依赖库:http://weixin.niurenqushi.com/article/2017-02-23/4776497.html
Eigen3、Sophus、OpenCV。
SuiteSparse库是稀疏矩阵运算库。Boost库是为C++语言标准库提供扩展的一些C++程序库的总称。Boost库很庞大,DSO其实只用了它的多线程功能。
Ziplib库是zip文件相关的库。这个库是可选的,DSO作者并没有强烈推荐大家安装。如果不安装的话,在运行TUM数据集的时候,需要把图像集的zip文件手动解压缩。