背景
我们在一些工业产品中使用树莓派替代了PLC和上位机,并借助树莓派的算力将AI和机器视觉引入工业领域。
以前的产品都不存在动作机构,仅仅将结果输出到指示灯、蜂鸣器或者显示器上,没有安全隐患,
现在引入了动作机构,需要根据结果驱动设备执行一定的动作,动作机构的引入,增加了产品的安全隐患,比如可能会夹手,撞机等。为此我们需要设计额外的保护程序,其中最重要的是急停功能的实现。
要求
- 急停信号优先级最高,任何情况下按下急停都应该马上停止
问题分析
- 动作机构由24V供电,急停开关串联在电源上,可以做到开关按下后,动作机构断电。(急停开关都带有锁定机构,按下后不会弹起,会保持按下状态)
- 树莓派独立于动作机构供电,急停开关按下后,树莓派收到信号,开始终止程序,之后一直监听急停按钮信号。
- Python一般情况下是单线程运行,为了及时响应急停,需要将急停功能做成主进程,业务动作逻辑作为子进程,当监听到急停信号后,马上终止子进程
设计思路
- 择子进程而不是子线程的原因为:Python中子线程无法发送kill信号,没有很好的办法干预子线程的行为(除非每一步都判断一下,会造成代码复杂度升高),而子进程可以直接发送terminate信号杀死。
- 急停使用低电平触发原因为:我们认为低电平是一个稳定的状态,高电平不是一个稳定的状态,比如由于某种原因导致断电,那么也应该触发急停,发生任何非正常的情况,停下来总是没错的。
接线示意图

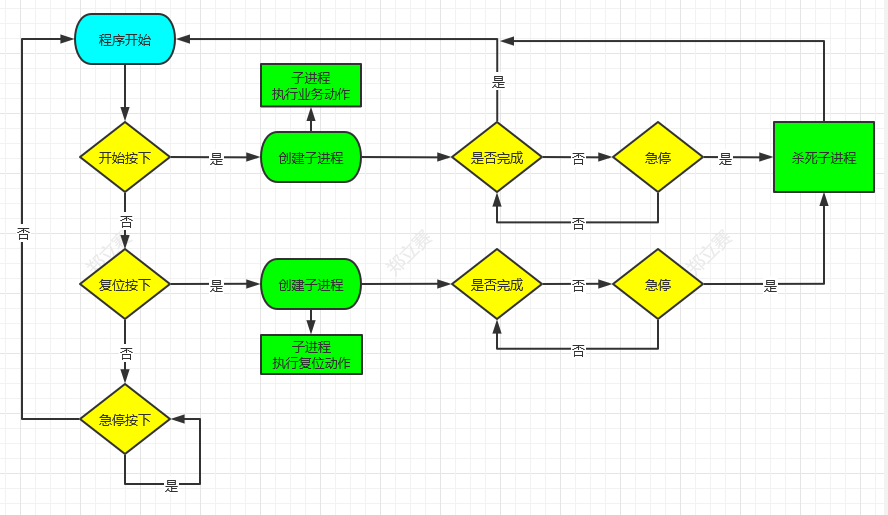
Python程序流程图
代码实现
import RPi.GPIO as GPIO
import time
from multiprocessing import Process
# 定义信号引脚
button_stop = 20
button_reset = 21
button_start = 22
# 初始化GPIO
def init_gpio():
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# 初始化按钮,按钮均为低电平触发
GPIO.setup(button_reset, GPIO.IN)
GPIO.setup(button_start, GPIO.IN)
GPIO.setup(button_stop, GPIO.IN)
# 业务动作
def step_1():
time.sleep(3)
return True
def step_2():
time.sleep(3)
return True
def step_3():
time.sleep(3)
return True
# 复位动作组合
def run_reset():
move_reset_list = [
step_3,
step_2,
step_1
]
result = True
try:
for func in move_reset_list:
func_name = func.__name__
print("正在执行: %s" % func_name)
func_result = func()
if not func_result:
result = False
break
except:
result = False
finally:
if not result:
exit(1)
else:
exit(0)
# 业务动作组合
def run_step():
result = True
try:
auto_cover_list = [
step_1,
step_2,
step_3
]
for func in auto_cover_list:
func_name = func.__name__
print("正在执行: %s" % func_name)
func_result = func()
if not func_result:
result = False
break
except:
result = False
finally:
if not result:
exit(1)
else:
exit(0)
if __name__ == '__main__':
# 开始工作
init_gpio()
while True:
if GPIO.input(button_start) == 0:
try:
p_run = Process(target=run_step, daemon=True)
p_run.start()
# 监听急停信号
while p_run.is_alive():
if GPIO.input(button_stop) == 0:
p_run.terminate()
break
else:
time.sleep(0.1)
if p_run.exitcode == 0 or p_run.exitcode is None:
print("执行成功")
else:
print("执行失败")
except:
print("执行失败")
elif GPIO.input(button_reset) == 0:
p_reset = Process(target=run_reset, daemon=True)
p_reset.start()
# 监听急停信号
while p_reset.is_alive():
if GPIO.input(button_stop) == 0:
p_reset.terminate()
break
else:
time.sleep(0.1)
elif GPIO.input(button_stop) == 0:
# 急停按钮释放后,再释放程序
while True:
if GPIO.input(button_stop) == 0:
time.sleep(0.1)
else:
break
else:
time.sleep(0.1)

