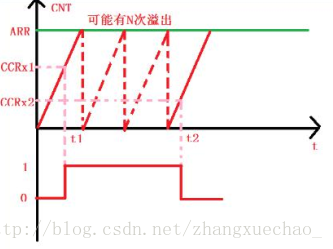
根据定时器的计数频率,我们就可以算出t1-t2的时间,从而得到高电平脉宽
计算公式
N * ARR + CCRx2首先设置定时器通道为上升沿捕获,这样在t1时刻,就会捕获到当前的CNT值,然后立即清零CNT,并设置定时器通道为下降沿捕获,这样到t2时刻,又会发生捕获事件,得到此时的CNT值,记为CCRx2
输入捕获配置步骤
1.使能定时器时钟
2.使能GPIO时钟,配置引脚模式
3.初始化定时器参数,预分频器的值、自动重装载的值等设定
4.设置通用定时器的输入捕获参数,开启输入捕获功能
5.开启捕获和定时器溢出中断
6.初始化NVIC外设,设置定时器中断优先级
7.使能定时器
8.编写定时器中断处理函数
举例
typedef struct
{
uint16_t TIM_Channel; //通道
uint16_t TIM_ICPolarity; //捕获极性
uint16_t TIM_ICSelection; //直接/间接映射
uint16_t TIM_ICPrescaler; //分频因子
uint16_t TIM_ICFilter; //滤波
} TIM_ICInitTypeDef;
#define ICPolarity_Rising 0x40
#define ICPolarity_Falling 0x80
#define Capture1_Max 0x3f
void TIM5_IRQHandler()
{
if(TIM_GetITStatus(TIM5, TIM_IT_Update) == SET) //产生更新中断
{
if((TIM_sta & ICPolarity_Falling) == ICPolarity_Falling) //低电平捕获中
{
if((TIM_sta & Capture1_Max) == Capture1_Max) //达到计数值上限
{
TIM_sta = ICPolarity_Falling;
}
else
{
TIM_sta++; //更新次数
}
}
}
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) == SET)
{
if((TIM_sta & ICPolarity_Falling) == ICPolarity_Falling) //捕获到低电平
{
TIM_sta |= ICPolarity_Rising;
Capture1_val = TIM_GetCapture1(TIM5); //保存捕获值
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Rising); //设置上升沿捕获
}
else
{
TIM_sta = ICPolarity_Falling;
TIM_Cmd(TIM5, DISABLE);
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Falling); //设置下降沿捕获
TIM_SetCounter(TIM5, 0); //计数器值清零
TIM_Cmd(TIM5, ENABLE);
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_Update | TIM_IT_CC1);
}
void KEY_TIM5_init(u16 period, u16 prescaler)
{
TIM_TimeBaseInitTypeDef tim_tb = {0};
TIM_ICInitTypeDef tim_ic =
{
TIM_Channel_1, //通道1
TIM_ICPolarity_Rising, //上升沿
TIM_ICSelection_DirectTI, //直接映射
TIM_ICPSC_DIV1, //1分频
0
};
NVIC_InitTypeDef nvic =
{
TIM5_IRQn,
2,
2,
ENABLE
};
GPIO_InitTypeDef gpio =
{
GPIO_Pin_0,
GPIO_Speed_50MHz,
GPIO_Mode_IPD //下拉输入模式
};
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能定时器时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_Init(GPIOA, &gpio);
tim_tb.TIM_Prescaler = prescaler;
tim_tb.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
tim_tb.TIM_Period = period;
tim_tb.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM5, &tim_tb); //初始化定时器
TIM_ICInit(TIM5, &tim_ic); //设置通用定时器的输入捕获参数
TIM_ITConfig(TIM5, TIM_IT_Update | TIM_IT_CC1, ENABLE); //开启捕获和定时器溢出中断
NVIC_Init(&nvic); //初始化NVIC
TIM_Cmd(TIM5, ENABLE); //使能定时器
}
int main(void)
{
KEY_TIM5_init(0xffff, 72 - 1);
while(1)
{
if((TIM_sta & ICPolarity_Rising) == ICPolarity_Rising) //捕获到低电平
{
res_data = TIM_sta & Capture1_Max;
res_data *= 0xffff;
res_data += Capture1_val;
printf("高电平持续时间 %d um.
", res_data);
TIM_sta = 0;
}
}
}